 ?) dans un future proche, je me laisserais tenter à ce style de réalisation, bravo en tout cas et merci de nous faire rêver =)
?) dans un future proche, je me laisserais tenter à ce style de réalisation, bravo en tout cas et merci de nous faire rêver =)
Contenu de stephane83
Il y a 64 élément(s) pour stephane83 (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#56286 Hexapode et Raspberry PI
 Posté par
sur 22 mai 2013 - 01:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 22 mai 2013 - 01:03
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
je suis un grand fan des petits robots à pattes autonomes, avec plus de savoir dans mes valises et un bon tuto ( peut-être sur ce forum ?) dans un future proche, je me laisserais tenter à ce style de réalisation, bravo en tout cas et merci de nous faire rêver =)
?) dans un future proche, je me laisserais tenter à ce style de réalisation, bravo en tout cas et merci de nous faire rêver =)
#56277 petit projet du weekend ^^
Posté par
sur 21 mai 2013 - 10:39
dans
Conseils et aide aux débutants, livres et kits en robotique
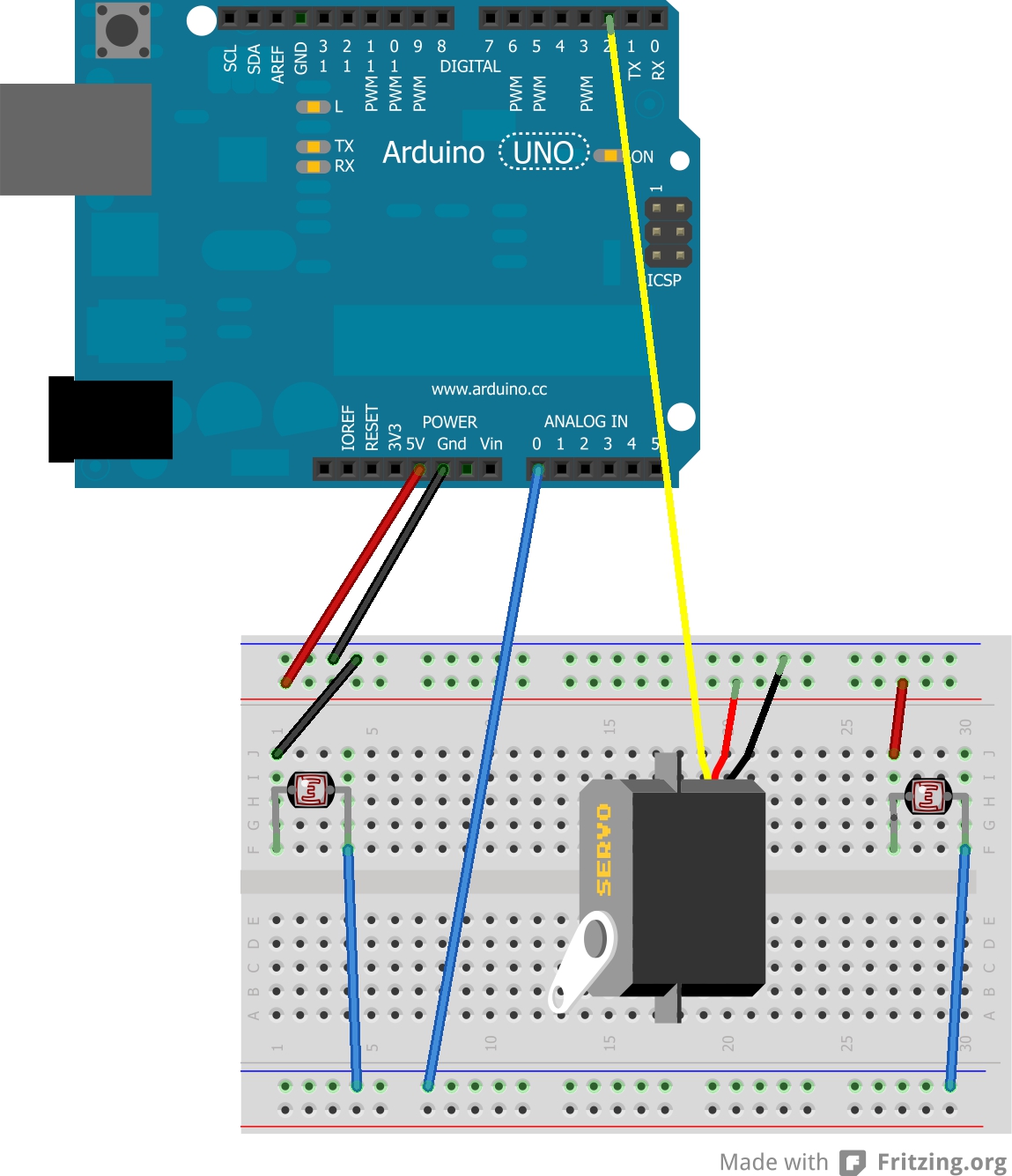
re salut, j'ai essayé de refaire sur le schéma de ton explication ( merci car j'apprends beaucoup) j'espère qu'il est bon ?!
file:///C:/Users/steph/Documents/tes1.png
file:///C:/Users/steph/Documents/tes1.png
#56275 petit projet du weekend ^^
Posté par
sur 21 mai 2013 - 10:00
dans
Conseils et aide aux débutants, livres et kits en robotique
il petit vidéo pour illustrer le sujet ^^
#56252 petit projet du weekend ^^
Posté par
sur 20 mai 2013 - 12:36
dans
Conseils et aide aux débutants, livres et kits en robotique
salut mike, merci pour ta réponse, je vais alors testé ça mais je crains ( a cause de mon manque dexpérience, je débute lol) avoir pas tout compris se que tu m'explique, je comprend le sens mais pas trop la technique.
je vais regarder un peu en détail les termes que tu me dit sur le net pour voir si je trouve une démarche a suivre. merci encore je sais grasse à toi que ces possible
je vais regarder un peu en détail les termes que tu me dit sur le net pour voir si je trouve une démarche a suivre. merci encore je sais grasse à toi que ces possible
#56278 petit projet du weekend ^^
Posté par
sur 21 mai 2013 - 10:44
dans
Conseils et aide aux débutants, livres et kits en robotique
arf j'arrive pas a mètre l'image
#56280 petit projet du weekend ^^
Posté par
sur 21 mai 2013 - 11:35
dans
Conseils et aide aux débutants, livres et kits en robotique
#56283 petit projet du weekend ^^
Posté par
sur 22 mai 2013 - 06:47
dans
Conseils et aide aux débutants, livres et kits en robotique
h
#56281 petit projet du weekend ^^
Posté par
sur 21 mai 2013 - 11:36
dans
Conseils et aide aux débutants, livres et kits en robotique
super merci pour ton aide =)
#56236 petit projet du weekend ^^
Posté par
sur 19 mai 2013 - 05:39
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut à tous, et encore merci pour votre aide, j'ai acheté un kit ardruino ( :http://www.conrad.fr/ce/fr/product/095060/Kit-de-dmarrage-avec-module-Uno-Arduino-K000007) qui est vraiment top pour les débutants (je le conseille).
Donc j'ai passé une semaine a faire les Tp du livre qui est avec le kit, bon la programmation est vraiment dure pour mon petit cerveau, je me tire les cheveux Lol, mais je m'accroche ! ce weekend je n'ai pas mâle de temps ( il fait que pleuvoir ...) et j'aimerai avoir votre aide pour faire un assemblage servomoteur avec deux photorésistances : le but est de mettre une photorésistance à droite du servo et une autre à gauche, puis que le servo bouge où il y a le plus de lumière.
À votre avis est-il possible de faire ça ? comment le mètre ça en pratique niveau montage des pièces et niveau programmation ?
j'aimerais, si cela ne vous dérange pas/>/>, avoir vos idées et vos solutions pour m'aider.
merci à vous et a bientôt!
ps: je travail sur la base d'une arduino UNO ^^
Donc j'ai passé une semaine a faire les Tp du livre qui est avec le kit, bon la programmation est vraiment dure pour mon petit cerveau, je me tire les cheveux Lol, mais je m'accroche ! ce weekend je n'ai pas mâle de temps ( il fait que pleuvoir ...) et j'aimerai avoir votre aide pour faire un assemblage servomoteur avec deux photorésistances : le but est de mettre une photorésistance à droite du servo et une autre à gauche, puis que le servo bouge où il y a le plus de lumière.
À votre avis est-il possible de faire ça ? comment le mètre ça en pratique niveau montage des pièces et niveau programmation ?
j'aimerais, si cela ne vous dérange pas
/>/>, avoir vos idées et vos solutions pour m'aider.merci à vous et a bientôt!
ps: je travail sur la base d'une arduino UNO ^^
#56258 petit projet du weekend ^^
Posté par
sur 20 mai 2013 - 05:04
dans
Conseils et aide aux débutants, livres et kits en robotique
wouw vraiment un grand merci!!!! je vais me coller à ça merci! je te tien au courant
#55105 besoin d'un petit coup d'pouce
Posté par
sur 04 avril 2013 - 02:43
dans
Aide et question concernant le cocotix original
Ok merci à vous deux pour vos réponses je vais faire tout ça ce weekend et je vous tiens au jus^^
Merci encore pour votre aide !
Merci encore pour votre aide !
#55093 besoin d'un petit coup d'pouce
Posté par
sur 04 avril 2013 - 12:26
dans
Aide et question concernant le cocotix original
Bonjour à tous, alors voila je viens de finir ma cocotix V1 =) ! Super Tuto vraiment sympa de penser à nous débutant ^^! Mais voilà je suis face à un problème : ma cocotix ne va pas tout droit elle tourne en rond, je remarquer que les deux moteurs ne tournent pas à la même vitesse 0 o! je comprends pas... mon câblage et bon. comment résoudre le problème ? merci par avance de votre aide ! =)
à bientôt
( ps: je suis novice soyez indulgent ^^)
à bientôt
( ps: je suis novice soyez indulgent ^^)
#55357 besoin d'un petit coup d'pouce
Posté par
sur 11 avril 2013 - 09:47
dans
Aide et question concernant le cocotix original
alors il y avais un moteur qui etait pas comme les autres: plus vieu et avec une petite tige de fer soudé (patte de résistance je crois) du coup j'ai acheté un autre moter sur conrad et tout va bien! merci pour votre aide ! bientot ROby avec d'autres problémeS XD
#55097 besoin d'un petit coup d'pouce
Posté par
sur 04 avril 2013 - 01:03
dans
Aide et question concernant le cocotix original
Merci pour cette réponse, tu dis "résistance", tu penses à quoi ? le composant électronique ou autre chose ?Re-bonjour,
Soit les moteurs sont différents -> faire laisser moteur plus piles en directe.
Soit un des deux moteurs a son alimentation qui est bridée par une "résistance".
Gyro49
#56103 Loliop Arrive!!!
Posté par
sur 13 mai 2013 - 11:36
dans
Et si vous vous présentiez?
salut, bienvenue, comme moi tu débutes alors je te souhaite bon courage et beaucoup de plaisir !
a+
a+
#57568 problémé code arduino librairie
Posté par
sur 23 août 2013 - 05:45
dans
Programmation
Le premier message d'erreur est important :
"In file included from ChuckServoTest.cpp:3: /WiiChuck.h:33:23: error: WProgram.h: No such file or directory"
Le fichier WProgram.h est manquant.
Ce n'est pas un programme standard. Je ne l'ai pas dans mon environnement Arduino. Je ne ne vois pas sur la page http://www.pobot.org/Controle-avec-un-Wii-Nunchuck.html . Je ne sais pas d'où il vient et ce qu'il doit contenir. En tous cas, il faut soit ajouter ce fichier au bon endroit, soit supprimer la ligne d'include de ce fichier.
Ensuite, les messages d'erreur concernant "byte" sont un peu étonnant, car ce type de donnée devrait exister. Ces messages sont peut-être causés par le problème précédent.
salut Olivthill et merci pour avoir répondue! j'ai bien compris ton explication , pour la deuxième librairie tu sais doù elle peut venir ?
Merci encore à bientôt!
#57577 problémé code arduino librairie
Posté par
sur 24 août 2013 - 09:53
dans
Programmation
Ok. Content de l'apprendre. Mais est-ce qu'une action correctrice a été entreprise pour résoudre le problème ?
Si oui quel est le résultat maintenant ?
Si non, alors j'ai trouvé la solution entre-temps.
Il faudrait remplacer la ligne :
#include "WProgram.h"
par
#include "Arduino.h"
C'est parce que ça a changé depuis l'époque des anciennes Arduinos.
Quelle deuxième librairie ?
Salut, ouais en farfouillant, j'ai trouvé la même solution que toi "Arduino.H" car ce que tu mais expliquez-m'a fait comprendre qu'il y avait un problème de version d'arduino, j'ai testé la 0028 qui m'a mis sur la piste ^^! pour la deuxième c'est sur ce blog http://blog.oscarliang.net/wii-nunchuck-arduino-tutorial/ .
Merci pour ton aide j'ai appris des choses à prendre en compte sur arduino ! Là je vais déjà essayer de mettre un programme simple avec servo.h pour faire avancer mon robot tout droit .
#57526 problémé code arduino librairie
Posté par
sur 20 août 2013 - 06:41
dans
Programmation
salut à tous,
voila je viens de créer un robot hexapode, et je souhaite-le contrôler par un wii nunchuck car: il est pas chère ,et on a un accéléromètre a 3 axes, deux boutons et un joystick pour 15 euro!!
j'ai acheté cette adaptateur :http://www.robotshop.com/productinfo.aspx?pc=RB-Dfr-62&lang=fr-CA pour un carte arduino Uno.
pour m'aider dans programmation j'ai télécharger sur ce page http://www.pobot.org/-Capteurs-Wii-.html , une librairie pour le nunchuck et un exemple de programme pour servo ( piéce jointe les fichier).
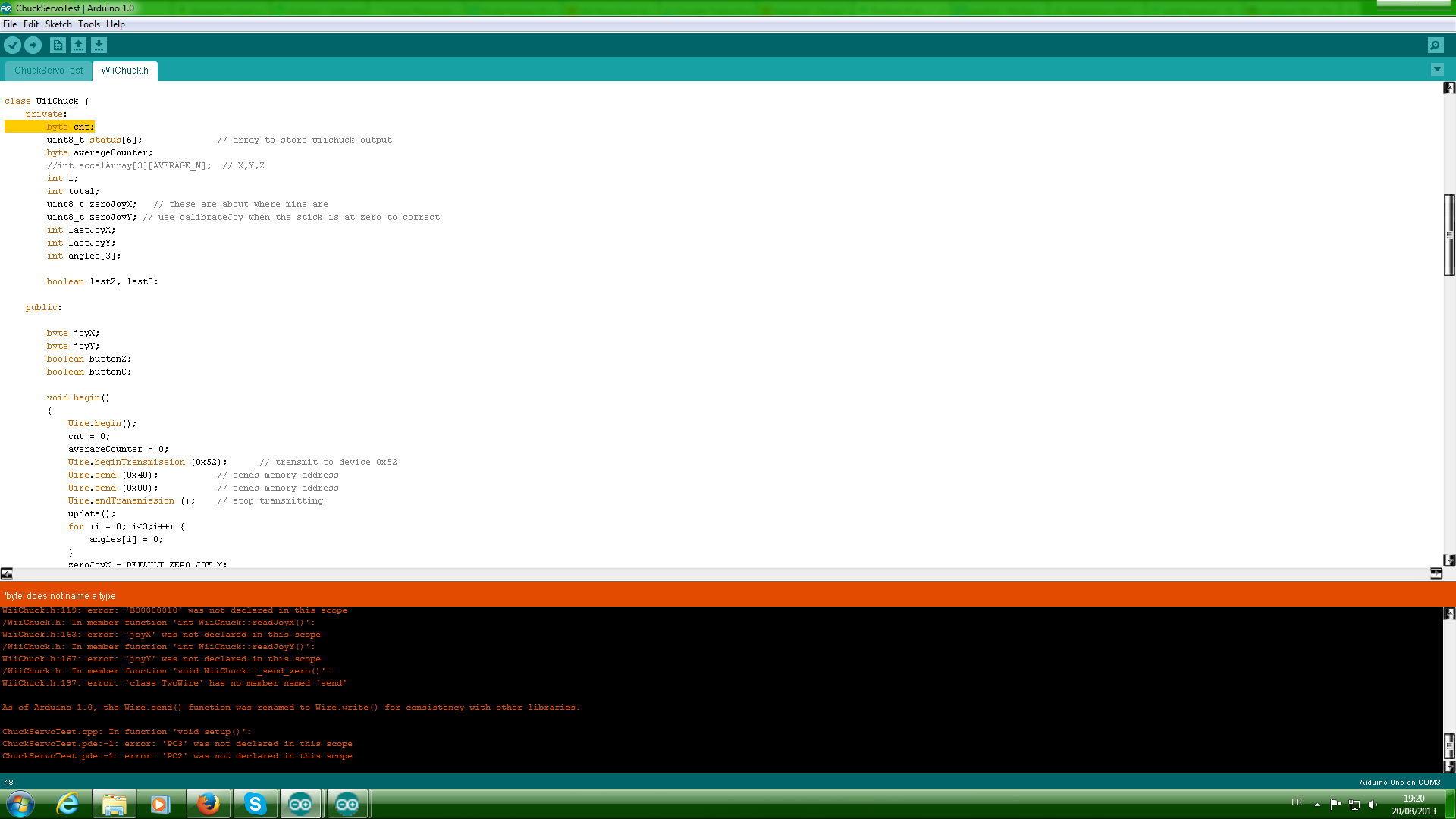
et là ça bug : je transfère tout dans arduino et je vérifie, jobtiens un message d'erreur :
In file included from ChuckServoTest.cpp:3:
/WiiChuck.h:33:23: error: WProgram.h: No such file or directory
In file included from ChuckServoTest.cpp:3:
WiiChuck.h:47: error: 'byte' does not name a type
WiiChuck.h:49: error: 'byte' does not name a type
WiiChuck.h:59: error: 'boolean' does not name a type
WiiChuck.h:63: error: 'byte' does not name a type
WiiChuck.h:64: error: 'byte' does not name a type
WiiChuck.h:65: error: 'boolean' does not name a type
WiiChuck.h:66: error: 'boolean' does not name a type
WiiChuck.h:144: error: 'boolean' does not name a type
WiiChuck.h:147: error: 'boolean' does not name a type
WiiChuck.h:152: error: 'boolean' does not name a type
WiiChuck.h:157: error: 'boolean' does not name a type
WiiChuck.h:188: error: 'byte' does not name a type
/WiiChuck.h: In member function 'void WiiChuck::begin()':
WiiChuck.h:71: error: 'cnt' was not declared in this scope
WiiChuck.h:72: error: 'averageCounter' was not declared in this scope
WiiChuck.h:74: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
WiiChuck.h:75: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
/WiiChuck.h: In member function 'void WiiChuck::calibrateJoy()':
WiiChuck.h:87: error: 'joyX' was not declared in this scope
WiiChuck.h:88: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::update()':
WiiChuck.h:96: error: 'cnt' was not declared in this scope
WiiChuck.h:96: error: 'class TwoWire' has no member named 'receive'
As of Arduino 1.0, the Wire.receive() function was renamed to Wire.read() for consistency with other libraries.
WiiChuck.h:96: error: '_nunchuk_decode_byte' was not declared in this scope
WiiChuck.h:99: error: 'cnt' was not declared in this scope
WiiChuck.h:100: error: 'lastZ' was not declared in this scope
WiiChuck.h:100: error: 'buttonZ' was not declared in this scope
WiiChuck.h:101: error: 'lastC' was not declared in this scope
WiiChuck.h:101: error: 'buttonC' was not declared in this scope
WiiChuck.h:109: error: 'joyX' was not declared in this scope
WiiChuck.h:110: error: 'joyY' was not declared in this scope
WiiChuck.h:113: error: 'B00000011' was not declared in this scope
WiiChuck.h:118: error: 'B00000001' was not declared in this scope
WiiChuck.h:119: error: 'B00000010' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyX()':
WiiChuck.h:163: error: 'joyX' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyY()':
WiiChuck.h:167: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::_send_zero()':
WiiChuck.h:197: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
ChuckServoTest.cpp: In function 'void setup()':
ChuckServoTest.pde:-1: error: 'PC3' was not declared in this scope
ChuckServoTest.pde:-1: error: 'PC2' was not declared in this scope
Donc je me dis qu'il faudrait que je test un autre fichier,
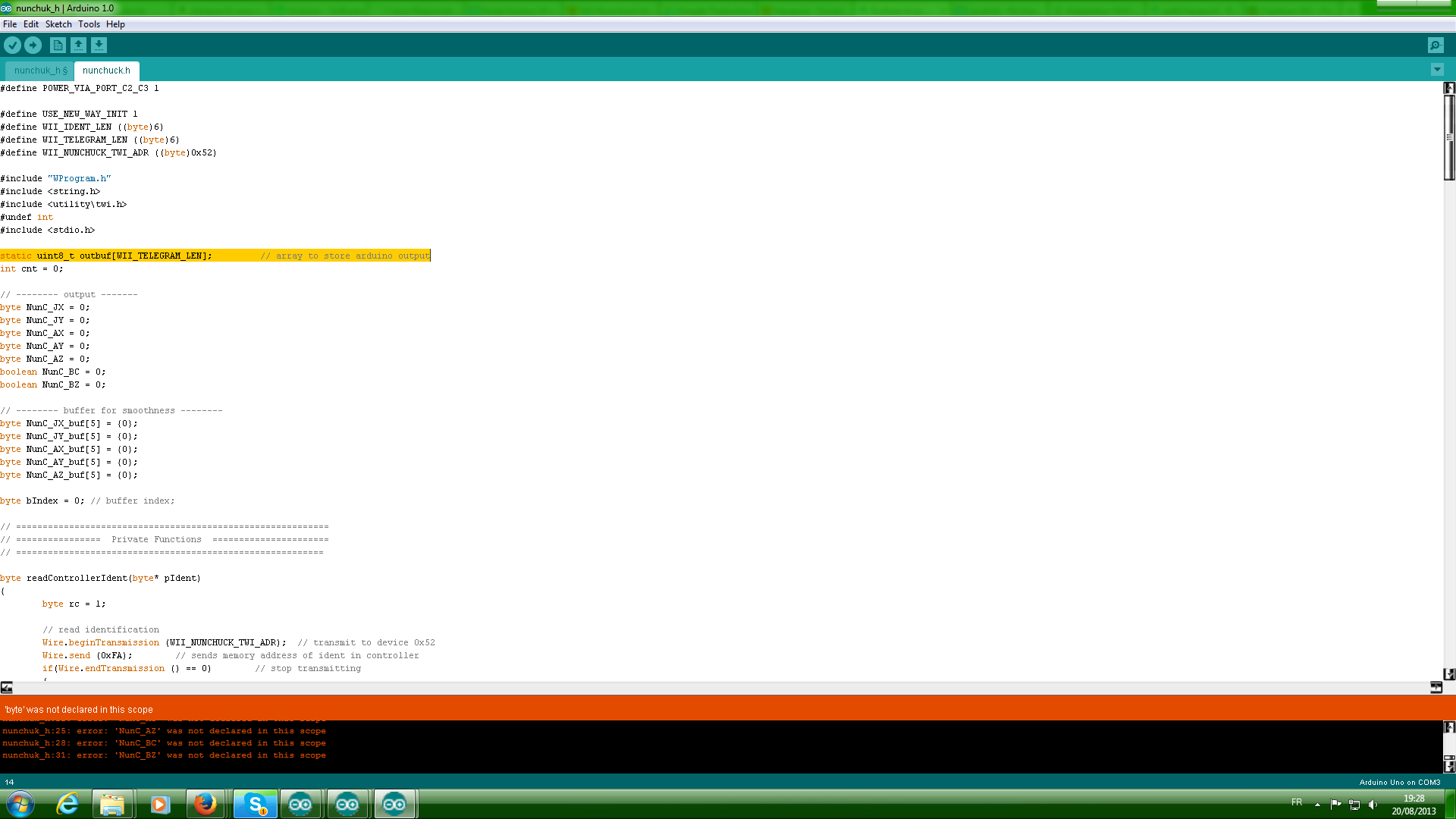
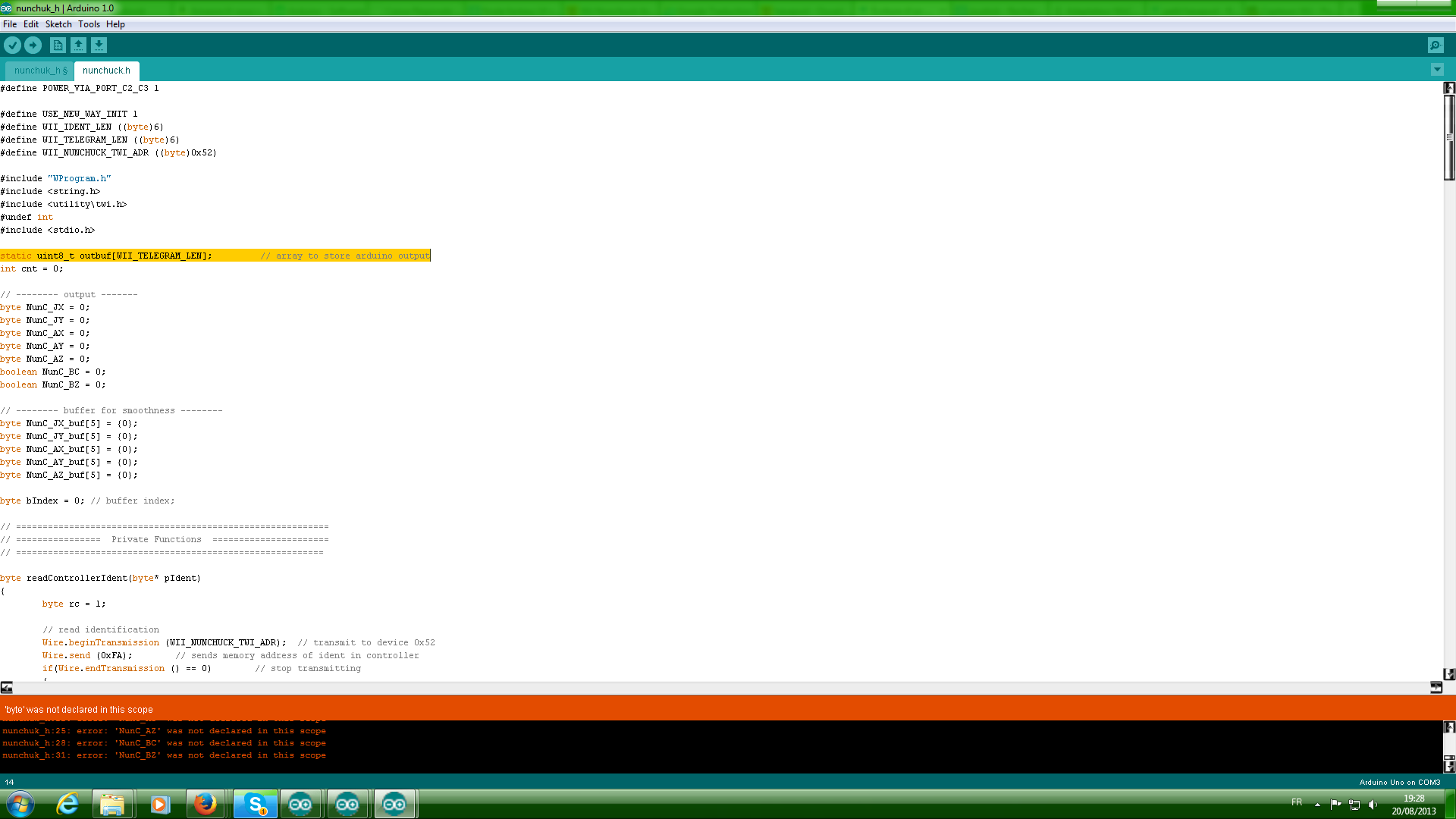
du coup je vais sur ce cette page qui est super : http://blog.oscarliang.net/wii-nunchuck-arduino-tutorial/
et la aussi une erreur que même la personne qui a créé ce tuto ne comprend pas :
In file included from nunchuk_h.cpp:1:
/nunchuck.h:8:22: error: WProgram.h: No such file or directory
/nunchuck.h:10:25: error: utility\twi.h: No such file or directory
In file included from nunchuk_h.cpp:1:
nunchuck.h:13: error: 'byte' was not declared in this scope
nunchuck.h:13: error: expected `)' before numeric constant
nunchuck.h:13: error: expected `]' before ';' token
nunchuck.h:17: error: 'byte' does not name a type
nunchuck.h:18: error: 'byte' does not name a type
nunchuck.h:19: error: 'byte' does not name a type
nunchuck.h:20: error: 'byte' does not name a type
nunchuck.h:21: error: 'byte' does not name a type
nunchuck.h:22: error: 'boolean' does not name a type
nunchuck.h:23: error: 'boolean' does not name a type
nunchuck.h:26: error: 'byte' does not name a type
nunchuck.h:27: error: 'byte' does not name a type
nunchuck.h:28: error: 'byte' does not name a type
nunchuck.h:29: error: 'byte' does not name a type
nunchuck.h:30: error: 'byte' does not name a type
nunchuck.h:32: error: 'byte' does not name a type
nunchuck.h:38: error: 'byte' does not name a type
/nunchuck.h: In function 'void clearTwiInputBuffer()':
nunchuck.h:64: error: 'Wire' was not declared in this scope
/nunchuck.h: In function 'void ConvertOutputs()':
nunchuck.h:93: error: 'byte' was not declared in this scope
nunchuck.h:93: error: expected `;' before 'temp_JX'
nunchuck.h:94: error: expected `;' before 'temp_JY'
nunchuck.h:95: error: expected `;' before 'temp_AX'
nunchuck.h:96: error: expected `;' before 'temp_AY'
nunchuck.h:97: error: expected `;' before 'temp_AZ'
nunchuck.h:99: error: 'temp_JX' was not declared in this scope
nunchuck.h:99: error: 'outbuf' was not declared in this scope
nunchuck.h:100: error: 'temp_JY' was not declared in this scope
nunchuck.h:101: error: 'temp_AX' was not declared in this scope
nunchuck.h:101: error: 'map' was not declared in this scope
nunchuck.h:102: error: 'temp_AY' was not declared in this scope
nunchuck.h:103: error: 'temp_AZ' was not declared in this scope
nunchuck.h:105: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:106: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:107: error: 'NunC_BC' was not declared in this scope
nunchuck.h:108: error: 'NunC_BC' was not declared in this scope
nunchuck.h:119: error: 'NunC_JX_buf' was not declared in this scope
nunchuck.h:119: error: 'bIndex' was not declared in this scope
nunchuck.h:120: error: 'NunC_JY_buf' was not declared in this scope
nunchuck.h:121: error: 'NunC_AX_buf' was not declared in this scope
nunchuck.h:122: error: 'NunC_AY_buf' was not declared in this scope
nunchuck.h:123: error: 'NunC_AZ_buf' was not declared in this scope
nunchuck.h:135: error: 'NunC_JX' was not declared in this scope
nunchuck.h:142: error: 'NunC_JY' was not declared in this scope
nunchuck.h:149: error: 'NunC_AX' was not declared in this scope
nunchuck.h:156: error: 'NunC_AY' was not declared in this scope
nunchuck.h:163: error: 'NunC_AZ' was not declared in this scope
/nunchuck.h: In function 'void NunC_Init(short unsigned int)':
nunchuck.h:180: error: 'PORTC' was not declared in this scope
nunchuck.h:180: error: 'PORTC2' was not declared in this scope
nunchuck.h:180: error: '_BV' was not declared in this scope
nunchuck.h:181: error: 'PORTC3' was not declared in this scope
nunchuck.h:182: error: 'DDRC' was not declared in this scope
nunchuck.h:183: error: 'delay' was not declared in this scope
nunchuck.h:187: error: 'Wire' was not declared in this scope
nunchuck.h:192: error: 'TWBR' was not declared in this scope
nunchuck.h:192: error: 'CPU_FREQ' was not declared in this scope
nunchuck.h:194: error: 'byte' was not declared in this scope
nunchuck.h:194: error: expected `;' before 'rc'
nunchuck.h:207: error: 'millis' was not declared in this scope
nunchuck.h:210: error: expected `)' before numeric constant
nunchuck.h:210: error: expected `)' before ';' token
nunchuck.h:215: error: expected `)' before numeric constant
nunchuck.h:215: error: expected `)' before ';' token
nunchuck.h:220: error: 'rc' was not declared in this scope
nunchuck.h:224: error: 'rc' was not declared in this scope
nunchuck.h:229: error: expected `;' before 'i'
nunchuck.h:230: error: 'outbuf' was not declared in this scope
nunchuck.h:230: error: 'readControllerIdent' was not declared in this scope
nunchuck.h:232: error: 'Serial' was not declared in this scope
nunchuck.h:233: error: 'i' was not declared in this scope
nunchuck.h:233: error: expected `)' before numeric constant
nunchuck.h:235: error: 'HEX' was not declared in this scope
nunchuck.h:241: error: 'Serial' was not declared in this scope
/nunchuck.h: At global scope:
nunchuck.h:245: error: 'boolean' does not name a type
/nunchuck.h: In function 'void NunC_SendNextByteRequest()':
nunchuck.h:266: error: 'byte' was not declared in this scope
nunchuck.h:266: error: expected `;' before 'i'
nunchuck.h:266: error: 'i' was not declared in this scope
nunchuck.h:268: error: 'Wire' was not declared in this scope
nunchuck.h:268: error: expected `)' before numeric constant
nunchuck.h:268: error: expected `)' before ';' token
/nunchuck.h: In function 'void print()':
nunchuck.h:277: error: 'Serial' was not declared in this scope
nunchuck.h:277: error: 'NunC_JX' was not declared in this scope
nunchuck.h:277: error: 'DEC' was not declared in this scope
nunchuck.h:280: error: 'NunC_JY' was not declared in this scope
nunchuck.h:283: error: 'NunC_AX' was not declared in this scope
nunchuck.h:286: error: 'NunC_AY' was not declared in this scope
nunchuck.h:289: error: 'NunC_AZ' was not declared in this scope
nunchuck.h:292: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:295: error: 'NunC_BC' was not declared in this scope
nunchuk_h.cpp: In function 'void loop()':
nunchuk_h:11: error: 'NunC_RecieveCommand' was not declared in this scope
nunchuk_h:13: error: 'NunC_JX' was not declared in this scope
nunchuk_h:16: error: 'NunC_JY' was not declared in this scope
nunchuk_h:19: error: 'NunC_AX' was not declared in this scope
nunchuk_h:22: error: 'NunC_AY' was not declared in this scope
nunchuk_h:25: error: 'NunC_AZ' was not declared in this scope
nunchuk_h:28: error: 'NunC_BC' was not declared in this scope
nunchuk_h:31: error: 'NunC_BZ' was not declared in this scope
si Quelqu'un peut m'aider à trouver une solution, merci d'avance !!
et a bientôt!
voila je viens de créer un robot hexapode, et je souhaite-le contrôler par un wii nunchuck car: il est pas chère ,et on a un accéléromètre a 3 axes, deux boutons et un joystick pour 15 euro!!
j'ai acheté cette adaptateur :http://www.robotshop.com/productinfo.aspx?pc=RB-Dfr-62&lang=fr-CA pour un carte arduino Uno.
pour m'aider dans programmation j'ai télécharger sur ce page http://www.pobot.org/-Capteurs-Wii-.html , une librairie pour le nunchuck et un exemple de programme pour servo ( piéce jointe les fichier).
et là ça bug : je transfère tout dans arduino et je vérifie, jobtiens un message d'erreur :
In file included from ChuckServoTest.cpp:3:
/WiiChuck.h:33:23: error: WProgram.h: No such file or directory
In file included from ChuckServoTest.cpp:3:
WiiChuck.h:47: error: 'byte' does not name a type
WiiChuck.h:49: error: 'byte' does not name a type
WiiChuck.h:59: error: 'boolean' does not name a type
WiiChuck.h:63: error: 'byte' does not name a type
WiiChuck.h:64: error: 'byte' does not name a type
WiiChuck.h:65: error: 'boolean' does not name a type
WiiChuck.h:66: error: 'boolean' does not name a type
WiiChuck.h:144: error: 'boolean' does not name a type
WiiChuck.h:147: error: 'boolean' does not name a type
WiiChuck.h:152: error: 'boolean' does not name a type
WiiChuck.h:157: error: 'boolean' does not name a type
WiiChuck.h:188: error: 'byte' does not name a type
/WiiChuck.h: In member function 'void WiiChuck::begin()':
WiiChuck.h:71: error: 'cnt' was not declared in this scope
WiiChuck.h:72: error: 'averageCounter' was not declared in this scope
WiiChuck.h:74: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
WiiChuck.h:75: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
/WiiChuck.h: In member function 'void WiiChuck::calibrateJoy()':
WiiChuck.h:87: error: 'joyX' was not declared in this scope
WiiChuck.h:88: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::update()':
WiiChuck.h:96: error: 'cnt' was not declared in this scope
WiiChuck.h:96: error: 'class TwoWire' has no member named 'receive'
As of Arduino 1.0, the Wire.receive() function was renamed to Wire.read() for consistency with other libraries.
WiiChuck.h:96: error: '_nunchuk_decode_byte' was not declared in this scope
WiiChuck.h:99: error: 'cnt' was not declared in this scope
WiiChuck.h:100: error: 'lastZ' was not declared in this scope
WiiChuck.h:100: error: 'buttonZ' was not declared in this scope
WiiChuck.h:101: error: 'lastC' was not declared in this scope
WiiChuck.h:101: error: 'buttonC' was not declared in this scope
WiiChuck.h:109: error: 'joyX' was not declared in this scope
WiiChuck.h:110: error: 'joyY' was not declared in this scope
WiiChuck.h:113: error: 'B00000011' was not declared in this scope
WiiChuck.h:118: error: 'B00000001' was not declared in this scope
WiiChuck.h:119: error: 'B00000010' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyX()':
WiiChuck.h:163: error: 'joyX' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyY()':
WiiChuck.h:167: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::_send_zero()':
WiiChuck.h:197: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
ChuckServoTest.cpp: In function 'void setup()':
ChuckServoTest.pde:-1: error: 'PC3' was not declared in this scope
ChuckServoTest.pde:-1: error: 'PC2' was not declared in this scope
Donc je me dis qu'il faudrait que je test un autre fichier,
du coup je vais sur ce cette page qui est super : http://blog.oscarliang.net/wii-nunchuck-arduino-tutorial/
et la aussi une erreur que même la personne qui a créé ce tuto ne comprend pas :
In file included from nunchuk_h.cpp:1:
/nunchuck.h:8:22: error: WProgram.h: No such file or directory
/nunchuck.h:10:25: error: utility\twi.h: No such file or directory
In file included from nunchuk_h.cpp:1:
nunchuck.h:13: error: 'byte' was not declared in this scope
nunchuck.h:13: error: expected `)' before numeric constant
nunchuck.h:13: error: expected `]' before ';' token
nunchuck.h:17: error: 'byte' does not name a type
nunchuck.h:18: error: 'byte' does not name a type
nunchuck.h:19: error: 'byte' does not name a type
nunchuck.h:20: error: 'byte' does not name a type
nunchuck.h:21: error: 'byte' does not name a type
nunchuck.h:22: error: 'boolean' does not name a type
nunchuck.h:23: error: 'boolean' does not name a type
nunchuck.h:26: error: 'byte' does not name a type
nunchuck.h:27: error: 'byte' does not name a type
nunchuck.h:28: error: 'byte' does not name a type
nunchuck.h:29: error: 'byte' does not name a type
nunchuck.h:30: error: 'byte' does not name a type
nunchuck.h:32: error: 'byte' does not name a type
nunchuck.h:38: error: 'byte' does not name a type
/nunchuck.h: In function 'void clearTwiInputBuffer()':
nunchuck.h:64: error: 'Wire' was not declared in this scope
/nunchuck.h: In function 'void ConvertOutputs()':
nunchuck.h:93: error: 'byte' was not declared in this scope
nunchuck.h:93: error: expected `;' before 'temp_JX'
nunchuck.h:94: error: expected `;' before 'temp_JY'
nunchuck.h:95: error: expected `;' before 'temp_AX'
nunchuck.h:96: error: expected `;' before 'temp_AY'
nunchuck.h:97: error: expected `;' before 'temp_AZ'
nunchuck.h:99: error: 'temp_JX' was not declared in this scope
nunchuck.h:99: error: 'outbuf' was not declared in this scope
nunchuck.h:100: error: 'temp_JY' was not declared in this scope
nunchuck.h:101: error: 'temp_AX' was not declared in this scope
nunchuck.h:101: error: 'map' was not declared in this scope
nunchuck.h:102: error: 'temp_AY' was not declared in this scope
nunchuck.h:103: error: 'temp_AZ' was not declared in this scope
nunchuck.h:105: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:106: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:107: error: 'NunC_BC' was not declared in this scope
nunchuck.h:108: error: 'NunC_BC' was not declared in this scope
nunchuck.h:119: error: 'NunC_JX_buf' was not declared in this scope
nunchuck.h:119: error: 'bIndex' was not declared in this scope
nunchuck.h:120: error: 'NunC_JY_buf' was not declared in this scope
nunchuck.h:121: error: 'NunC_AX_buf' was not declared in this scope
nunchuck.h:122: error: 'NunC_AY_buf' was not declared in this scope
nunchuck.h:123: error: 'NunC_AZ_buf' was not declared in this scope
nunchuck.h:135: error: 'NunC_JX' was not declared in this scope
nunchuck.h:142: error: 'NunC_JY' was not declared in this scope
nunchuck.h:149: error: 'NunC_AX' was not declared in this scope
nunchuck.h:156: error: 'NunC_AY' was not declared in this scope
nunchuck.h:163: error: 'NunC_AZ' was not declared in this scope
/nunchuck.h: In function 'void NunC_Init(short unsigned int)':
nunchuck.h:180: error: 'PORTC' was not declared in this scope
nunchuck.h:180: error: 'PORTC2' was not declared in this scope
nunchuck.h:180: error: '_BV' was not declared in this scope
nunchuck.h:181: error: 'PORTC3' was not declared in this scope
nunchuck.h:182: error: 'DDRC' was not declared in this scope
nunchuck.h:183: error: 'delay' was not declared in this scope
nunchuck.h:187: error: 'Wire' was not declared in this scope
nunchuck.h:192: error: 'TWBR' was not declared in this scope
nunchuck.h:192: error: 'CPU_FREQ' was not declared in this scope
nunchuck.h:194: error: 'byte' was not declared in this scope
nunchuck.h:194: error: expected `;' before 'rc'
nunchuck.h:207: error: 'millis' was not declared in this scope
nunchuck.h:210: error: expected `)' before numeric constant
nunchuck.h:210: error: expected `)' before ';' token
nunchuck.h:215: error: expected `)' before numeric constant
nunchuck.h:215: error: expected `)' before ';' token
nunchuck.h:220: error: 'rc' was not declared in this scope
nunchuck.h:224: error: 'rc' was not declared in this scope
nunchuck.h:229: error: expected `;' before 'i'
nunchuck.h:230: error: 'outbuf' was not declared in this scope
nunchuck.h:230: error: 'readControllerIdent' was not declared in this scope
nunchuck.h:232: error: 'Serial' was not declared in this scope
nunchuck.h:233: error: 'i' was not declared in this scope
nunchuck.h:233: error: expected `)' before numeric constant
nunchuck.h:235: error: 'HEX' was not declared in this scope
nunchuck.h:241: error: 'Serial' was not declared in this scope
/nunchuck.h: At global scope:
nunchuck.h:245: error: 'boolean' does not name a type
/nunchuck.h: In function 'void NunC_SendNextByteRequest()':
nunchuck.h:266: error: 'byte' was not declared in this scope
nunchuck.h:266: error: expected `;' before 'i'
nunchuck.h:266: error: 'i' was not declared in this scope
nunchuck.h:268: error: 'Wire' was not declared in this scope
nunchuck.h:268: error: expected `)' before numeric constant
nunchuck.h:268: error: expected `)' before ';' token
/nunchuck.h: In function 'void print()':
nunchuck.h:277: error: 'Serial' was not declared in this scope
nunchuck.h:277: error: 'NunC_JX' was not declared in this scope
nunchuck.h:277: error: 'DEC' was not declared in this scope
nunchuck.h:280: error: 'NunC_JY' was not declared in this scope
nunchuck.h:283: error: 'NunC_AX' was not declared in this scope
nunchuck.h:286: error: 'NunC_AY' was not declared in this scope
nunchuck.h:289: error: 'NunC_AZ' was not declared in this scope
nunchuck.h:292: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:295: error: 'NunC_BC' was not declared in this scope
nunchuk_h.cpp: In function 'void loop()':
nunchuk_h:11: error: 'NunC_RecieveCommand' was not declared in this scope
nunchuk_h:13: error: 'NunC_JX' was not declared in this scope
nunchuk_h:16: error: 'NunC_JY' was not declared in this scope
nunchuk_h:19: error: 'NunC_AX' was not declared in this scope
nunchuk_h:22: error: 'NunC_AY' was not declared in this scope
nunchuk_h:25: error: 'NunC_AZ' was not declared in this scope
nunchuk_h:28: error: 'NunC_BC' was not declared in this scope
nunchuk_h:31: error: 'NunC_BZ' was not declared in this scope
si Quelqu'un peut m'aider à trouver une solution, merci d'avance !!
et a bientôt!
Image(s) jointe(s)
Fichier(s) joint(s)
-
 ChuckServoTest-090507a.zip 69,08 Ko
121 téléchargement(s)
ChuckServoTest-090507a.zip 69,08 Ko
121 téléchargement(s)
#57578 les bases du mouvement serv
Posté par
sur 24 août 2013 - 10:02
dans
Programmation
A priori, en termes de code, savoir commander tes servomoteurs en position (librairie servo) devrait suffire si tu peux accéder directement à chacun. À partir de ça, tu peux mettre n'importe quelle patte dans n'importe quelle position. Tu peux d'ailleurs t'amuser à contrôler une patte pour lui faire faire les gestes que tu veux.
Pour ce qui est de marcher, je dirais qu'il y a deux méthodes :
- l'une "expérimentale" : tu cherches comment contrôler les bons mouvements de pattes en testant des valeurs et en regardant quel geste fait la patte. Sachant en suite que la marche correspond à répéter un cycle de déplacement de chacune des pattes, tu peux répéter cette suite de commandes et faire avancer ton robot.
- l'autre est plus mathématique : en utilisant un modèle de la géométrie de ton robot (distances inter-articulations), tu peux raisonner sur la position du bout de chaque patte, et donc la position du "centre" de ton robot, et utiliser l'inverse de ce modèle pour trouver les commandes à appliquer pour déplacer le centre. Cherche des informations sur la cinématique inverse, c'est un domaine bien maîtrisé de la robotique (qui vient du contrôle des bras industriels).
Merci pour ta réponse ! J'ai cherché de chose sur la cinétique inverse et il y a une méga source de mouvement avec cette méthode, je vais étudier, mais pour le moment je pense que je ne suis pas ce niveau de programmation, donc je vais suivre dans un premier temps ton premier conseille =) !
Tu dis " testant des valeurs ", tu veux parler des angles, des degrés, oui une synchronisation avec du temps ?(excuse-moi si je comprends pas trop je suis débutant^^) aurais-tu un petit exemple de programme pour que je puisse l'étudier et comprendre ?
merci et a bientôt
#57571 les bases du mouvement serv
Posté par
sur 23 août 2013 - 08:29
dans
Programmation
bonsoir à tous, j'aurais voulu savoir quelles sont les bases de programmation sous arduino Uno pour créer un mouvement simple sur un hexapode 12 DOF, exemple je souhaite avancer tout droit !
Merci pour votre future aide ( je début dans la programmation arduino )
Merci pour votre future aide ( je début dans la programmation arduino )
#55369 Mon cocotix V1 4*4
Posté par
sur 12 avril 2013 - 11:41
dans
Les cocotix des membres "version origine"
merci, je vais améliorer le châssis car les moteurs ne sont pas très alignés, elle tourne légèrement sur la droite ! je ferais des photos
#55350 Mon cocotix V1 4*4
Posté par
sur 11 avril 2013 - 07:38
dans
Les cocotix des membres "version origine"
re salut les amis, bon sayer avec votre aide le robot est finish et il marche super !!! une petite cocotix "1.5" ^^
Image(s) jointe(s)
#55091 Stéphane, 25 ans, ayant pour premier projet le COCOTIX V1
Posté par
sur 04 avril 2013 - 12:11
dans
Et si vous vous présentiez?
Bonjour à tous, je m'appelle Stéphane j'ai 25 ans et je me lance dans la robotique amateur! Depuis 2 ans j’avais l'idée de commencer la robotique comme passion, mais ne possédant aucune base dans ce milieu ( oui je suis encore un noob XD, dsl pour ça^^) je n’osais pas débuter! Aujourd'hui est un grand jour : je franchis le pas et je me lance! Donc je viens avec toute modestie m’inscrire sur ce super-forum, pour partager ma passion avec vous et SUR TOUT, mes futurs problèmes de novice ^^! Donc ma première étape se tourne vers COCOTIX V1 ^^.
merci à vous et a bientôt .
Stephane
merci à vous et a bientôt .
Stephane
#55094 Stéphane, 25 ans, ayant pour premier projet le COCOTIX V1
Posté par
sur 04 avril 2013 - 12:26
dans
Et si vous vous présentiez?
merci =)Bonjour,
Soit le bienvnue/>/>
Gyro49
#55353 Mon cocotix V1 4*4
Posté par
sur 11 avril 2013 - 08:31
dans
Les cocotix des membres "version origine"
merci, bon pour la suite je vise le Roby ou bien http://letsmakerobots.com/start, ROBY a l'aire d'etre plus simple je crois .




