Contenu de zapan
Il y a 28 élément(s) pour zapan (recherche limitée depuis 17-mai 13)
Par type de contenu
Voir pour ce membre
#28080 bras articulé
 Posté par
sur 18 avril 2011 - 06:18
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 18 avril 2011 - 06:18
dans
Bras robots, pinces, tourelles, et autres manipulateurs
#28082 bras articulé
Posté par
sur 18 avril 2011 - 08:12
dans
Bras robots, pinces, tourelles, et autres manipulateurs
C'est vrai qu'il est possible de commander par ligne direct, cependant j'hesite entre les deux car apres j'aimerais abouti en le rendant non filaire.( meme si c'est du +)
Il me reste dc le choix a faire soit commander via un port // directement
ou utiliser un micro-controlleur style pic 16F84, ou pic 18
#28076 bras articulé
Posté par
sur 18 avril 2011 - 02:48
dans
Bras robots, pinces, tourelles, et autres manipulateurs
#28066 bras articulé
Posté par
sur 14 avril 2011 - 06:42
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Le but es t de commander un joystick pour des test de boitier .............. ( je ne peux pas dire les marques et l'entreprise).
Le bras sera composé de 4/5 servomoteur.
Dans un premier temps je vais m'occuper de la réalisation technique.
Dimension du bras : 70 cm en horizontal (pince épaule)
On veut pouvoir exercer une force de 10 newton (n'ayant besoin que de 5 newton je préfère doubler pour une meilleur marge) selon x et Y en bout de pince.
Ci joint un rapide schéma réaliser sous paint
j'ai définit des couleur pour chaque servomoteur.
Les tiges serait des bielletes qui peuvent être réalisés en plastique, aluminium ou en carbone donc un poids qui sera décider
Je suis en train de faire les calculs pour déterminer les servosmoteur je pense utiliser des Servo Hitec HS-785HB ou moins si je peux.
[ EDIT 1: les dimensions des tiges j'ai oublier dsl :)
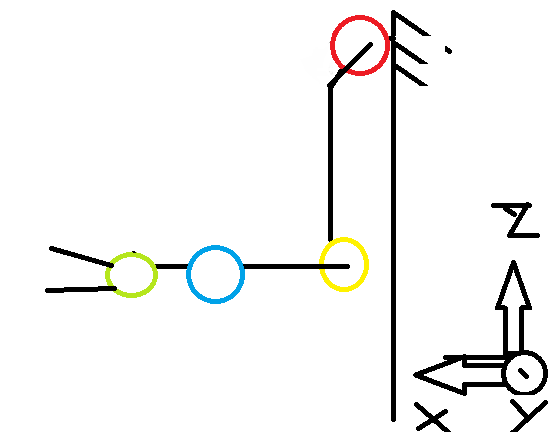
tige 1 : epaule coude 25 cm Je définis ces valeurs comme entre Axe c'està dire distance entre les axes du servomoteurs
tige 2: coude poignet 30 cm
tige 3: doigt 13 cm
Pour informations le prochains post regroupera toutes les posts très intéressant (merci notamment a Esprit MRAlexis44660 et julienmus) et qui sont des mines d'informations.
merci
#28072 bras articulé
Posté par
sur 16 avril 2011 - 03:47
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Esprit, effectivement pour le bras de levier, je suis en train de finir le dimensionnement des servomoteurs et du choix.
Le bras sera peut être un peu modifier.
Par contre seriez vous ou on peut trouver des schémas électriques pour créer une carte de commande de servomoteurs.
il en existe dans le commerce, mais comme j'ai pas mal de composant je pense me la créer moi même .
Je voudrais réaliser le programmes en C ou en VB ,ainsi Je voudrais savoir si le pic 16F peut etre commander en VB ou en C, sinon connaitriez vous le bon composant.
Est ce vrai qu'on peut lier directement des servomoteurs au port parallèle et ensuite le brancher directement au pc ??
#28069 bras articulé
Posté par
sur 14 avril 2011 - 11:15
dans
Bras robots, pinces, tourelles, et autres manipulateurs
3 cm pour le doigt
30cm coude poignet
30cm doigt epaule
en mettant tous a l'horizontal
Les raccord serait fait en aluminum et je peux utiliser tous d'abord un hs422 pour le poignet
ensuite il faut quelque calcul .
rapport massique de l'alu : 2700 =r
On veut une tige creuse d'alu diametre 2 longueur 30 et 0,2 de bordure donc volume cm^3= (V1-V2)=33,2 cm^3
puis conversion en m 3= 0,000033
enfin r=m(kg)/v(M3) => m=89g
ensuite on se place au second moteur :
donc les force sont poid de 10n a 33cm +le poid du servo à 30 (soit 45g) +lpoids de l'alu 89g à 15cm
soit 1350+1335+33000=35kg ,
pour le second servomoteur je prend donc un http://www.robotshop.com/servo-moteur-heavy-duty-s777-6bb-gws.html de 42KG/cm
Puis pour l'épaule je prend dans un premier temps en gros un http://www.robotshop.com/servo-moteur-hs805BB-hitec.html
couplé a un http://www.robotshop.com/engrenage-puissance-spt400-4-1-servocity.html
qui me permet ainsi d'avoir un couple 49kg/cm environ donc il y aura de la marge car 98kg/ 63 CM =1,5 kg soit 14 N alors que a la base j'ai besoin d'environ 5,6 N 'j'avait pris le double en temps que sécurité
(edit 1) : voila le vrai calcul me faudrait un 76,7 kg pour avoir du 10 n en bout du verin don c a ce moement jpeut me limiter à un
http://www.robotshop.com/engrenage-puissance-spt400-3-1-servocity.html.
Je voudrais ainsi savoir si on peut utiliser Pour le pilotage je pense me tourner vers http://www.robotshop.com/controlleur-servo-phidgets-8.html
ESt ce conseiller ou pas ??
#28083 bras articulé
Posté par
sur 21 avril 2011 - 09:26
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Pour la commande cela se fera directement par port // via le logiciel VB
Pour connaitre les fournisseurs, envoyer moi un message.
Par contre quelqun si connaitrait en cable usb /parallèle tel celui ci ==> http://www.webducommerce.com/images/Vel/pcusb13.jpg
Merci
#28085 bras articulé
Posté par
sur 26 avril 2011 - 08:30
dans
Bras robots, pinces, tourelles, et autres manipulateurs
#28074 bras articulé
Posté par
sur 18 avril 2011 - 09:24
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Réponse un peu tardive de ma part.Désolé!
Le problème pour les cartes toutes réaliser, c'est le temps. en effet entre le moment ou il creer un devis et au moment s ou cela est analyser puis envoyer( en bref la paperasserie ) il peut s écouler 10 semaine environ soit mon stage.
Donc je voudrais au moins réaliser la carte et la programmer.
Ainsi après quelques recherches j, j'ai différentes possibilités:
La première est de relier directement par port parallèle.
La seconde est de créer une carte de commande :
- A ce moment j'ai le choix entre un 74 hct 240
ATméga48Dl 28
pic 16F627
pic 16f84
grâce a ce site j'ai découvert ces plusieurs solutions http://fribotte.free.fr/bdtech/
Cependant j'aimerais savoir si il est possible de programmer un pic via VB ?
ET parmi les solutions laquelle est la plus intéressante
#28088 bras articulé
Posté par
sur 10 mai 2011 - 08:25
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Ainsi je voudrais savoir si des personnes on deja utiliser un adaptateur usb //
#28089 bras articulé
Posté par
sur 30 mai 2011 - 12:22
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Ce ne sont pas les servos définitifs mais bon, le tout est commandé par ordinateur directement à travers le port LPT1
#28087 bras articulé
Posté par
sur 02 mai 2011 - 10:54
dans
Bras robots, pinces, tourelles, et autres manipulateurs
#23798 préentation zapan
Posté par
sur 18 avril 2011 - 10:37
dans
Et si vous vous présentiez?
Petite astuces qui fut trouver quand on s'ennuyer, Quand vous avez votre phrase sélectionner la avec le clic droit et faites la bouger dans le cadre de l'autre couleur la réponse en ressort ^^
#23800 préentation zapan
Posté par
sur 18 avril 2011 - 02:51
dans
Et si vous vous présentiez?
Mais sinon j'ai quand même progresser.
#23803 préentation zapan
Posté par
sur 18 avril 2011 - 06:19
dans
Et si vous vous présentiez?
#23791 préentation zapan
Posté par
sur 13 avril 2011 - 08:06
dans
Et si vous vous présentiez?
Je suis en fin d'étude d'un DUT GEII à Nancy (génie électrique et informatique industriel),et possède un baccalauréat STI Génie électrotechnique.
Je possède des connaissances sur les moteurs,surtout sur les moteurs asynchrones ou continus qui sont utilisés dans le domaine industriel.
J' ai des connaissances dans le domaine de l'énergie de puissances ( 230/400 onduleur,altivar, altistart, pile à combustible, énergie renouvelable ,régulation et dans le domaine de l'étude mécanique )
Pour ce qui concerne l'informatique, j'ai des connaissances dans l'échange de tram, la programmation sous pic,xillinx ,c #, basic, python.
j'ai étudier différents systèmes électroniques (rlc,n555, M53200,..., filtrage numérique, aop, propagation...
j'ai eu l'occasion de participer à plusieurs reprises, à la réalisation de robot pour le concours de Vierzon.
Cependant je ne connait pas beaucoup les différentes cartes et composants existant sur le marché, car tout ce qu'on utilisait nous était enseigner via des projets existant. Ainsi mes connaissances restent pour l'instant un peu trop scolaire mais je suis de nature curieux et je remercie d'avance pour les connaissances que je pourrai acquérir sur ce site.
Je m'intéresse beaucoup à la robotique notamment à celle concernant le biomédical car elle coïncide avec mon projet professionnel ( technicien en bureau d'étude de prothèse robotisé)
#28059 projet table xy
Posté par
sur 14 avril 2011 - 06:33
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Le choix d'une table XY est réfléchi car je n'ai à ce moment que 2 valeur à modifier pour pouvoir me mouvoir dans l'espace. ET après je souhaite pouvoir la réutiliser pour essayer de contrôler les différentes télécommandes (tv, décodeur, lecteur cd).Pour cela j'aurai juste à modifier le programme.) ainsi rentrer des valuers programmés dans un tableau en x et y pour aller sur on/off automatiquement
Concernant le vérin, après de longues recherches , j'ai remarquer que les vérins électriques restent lourd et développe trop de force, donc voulant me limiter à une source d'énergie (l'électricité) je pense me rabattre sur un actionneur linéaire du type (http://www.directindustry.fr/prod/haydon-kerk-motion-solutions/actionneurs-lineaires-pas-a-pas-31460-451848.html ).
Ce qui ajouterait un moteur.
#28057 projet table xy
Posté par
sur 13 avril 2011 - 10:12
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
Je tiens dans un premier temps à m'excuser pour le manque de politesse dans mon premier post, et je tacherai de faire des efforts pour l'orthographe à l'avenir.
Je tiens ensuite à remercier les personnes qui m'ont déjà répondu.
Je vais essayer d'être ordonner pour la suite du projet. tous d'abord je pose ici les dimensions de la table XY que je décide de réaliser :X 120/Y 220 (mm)
la structure sera réaliser soit en plastique soit en aluminium .
Le choix du vérin électrique est pour moi le plus simple car il suffit juste de l'alimenter pour le faire descendre.
Pour le système qui ont toute un poids d'accroche cela serait une simple pince qui se referme et s'ouvre en fonction de la sortie ou rentré du vérin
Les peluches sont des petites peluches pour porte clés (je les collectionnes )qui ont un faible poids. Don je pense qu'un vérin électrique 10 N voir moins fera largement l'affaire.
j'hésite entre soit commander les axes avec des chariot ou des vis sans fins , d'apres vous lequel est le mieux ?
Pour la commande des axes , vu le dimensionnement de la plaque je pense que des servomoteurs serait plus utiles que des moteurs pas à pas ( notamment au niveau poids et couple)., Ais-je tort ??
Après quelque recherches, j'ai trouver ces liens utiles
QUi m'ont permit de mieux cerner les servomoteurs qui sont pour moi une découverte du point de vue du fonctionnement.
Ainsi je voudrais savoir quelques informations complémentaires à propos de ce servomoteurs
SI j'ai bien compris il permet de faire 360°,c'est à dire un tour ou plusieurs tours ?( je pense qu'il peut en faire plusieurs)
ET aussi à ce moment là pouvons nous avoir une position précise via le potentiomètre ( exemple on a fait 5 tours et demi alors le potentiomètre affichera 5*360 +180 =1980° ou juste les 180 °)
A ce moment le système est t'il plus rentable que utiliser des moteurs pas à pas récupérer sur une imprimante laser et donc revenir a un système similaire au CNC ??
merci .
#28054 projet table xy
Posté par
sur 13 avril 2011 - 12:23
dans
Bras robots, pinces, tourelles, et autres manipulateurs
je débute un peu en électronique, cependant je voudrais réaliser un projet de table XY comcommandé par ordinateur.
Mon objectif est la réalisation d'un automate attrapant les peluches, comme celle ressemblant dans les foires.
Je pense essayer de m'appuyer sur les principes des cnc pour la commande par ordinateur.
Apres quelques recherches ,j'ai décidé de réalisé les mouvements des axes X et Y via des moteurs pas à pas .La pince serait remplacé par un vérin électrique.
Cependant, Je voudrais savoir si il n'était pas plus utile de prendre des servomoteurs plutôt que des moteurs pas à pas ( car ils présenterait un défaut de saut de pas si j'ai bien compris.)Pouvons nous avoir une position exacte des servomoteurs après les avoirs modifier en moteur a courant continu
Les moteurs étant encore à définir,puis je utiliser comme carte de commande la DFRduino Romeo Robotique 328 ? (quels langage peut t'ont utiliser ? C++ ,visual basic, C# , pic
De plus la carte DFRduino Romeo Robotique 328 ayant un l298, dois je ajouter une carte ayant un L297 ou pas ?
sinon puis je utiliser ces deux cartes à la place
http://www.conrad.fr/kit_commande_moteur_pas_a_pas_big_step_p_48674_49792_850523?ns_campaign=retargeting&ns_mchannel=retargeting&ns_source=criteo&ns_linkname=0&ns_fee=0
http://www.conrad.fr/kit_commande_moteur_pas_a_pas_comio_p_48674_49792_850524_208532_FAS
#24901 signal servo
Posté par
sur 24 mai 2011 - 03:34
dans
Mécanique
#24899 signal servo
Posté par
sur 24 mai 2011 - 03:06
dans
Mécanique
Voila j'ai une question et j'aimerai avoir vos avis.
Cette question est en rapport avec mon bras robot qui avance tres bien dailleurs.
voila j'ai des servos hs-322 que je commande directement par le port parallele via vb6 sans aucun soucis.
Je voudrais maintenant passer à plus de puissance donc je voudrais utiliser un hs 7980th
Je voudrais l'alimenter sous du 7,5v pour qu'il développe 46kg.
Ma question est :
Si lalimentation de mon servo est de 7.5v, mon amplitude de signal de commande doit-il être aussi de 7.5v ou de 5v ??
#24905 signal servo
Posté par
sur 25 mai 2011 - 08:08
dans
Mécanique
voici les datasheet, le premier est un hs-765hb:
http://www.servocity.com/html/hs-765hb_sail_arm.html
le second est un hs7980 th ultra torque:
http://www.robotshop.com/eu/servomoteur-hs-7980th-ultra-hitec.html
Je voudrais etre sur si c'est bien du 5v pour la commande ou pas
Pour la video, je pense la mettre si je peux en ligne sur mon topic création
#24904 signal servo
Posté par
sur 24 mai 2011 - 10:23
dans
Mécanique
Par contre si je donne les datasheet des servos, Pouvez vous me dire si le siganl de commande est bien 5 volt svp ?
#24907 signal servo
Posté par
sur 30 mai 2011 - 12:20
dans
Mécanique
#24898 Servomoteurs
Posté par
sur 24 mai 2011 - 02:54
dans
Mécanique
http://www.teaser.fr/~osegouin/aeromode/servos.phtml
C'est une base de donnée de servo-moteur qui permet d'avoir les valeurs prix couple ,chute de tension...
Ce n'est plus à jour, cependant il y a une 100 de servos qui on été testé
voila.





{kind=link}