Hi Oracid,
Well, after much searching the internet, and reading forum posts. It seems that I am not alone in this issue. It seems that there have been a few issues with voltage drops on the PCA9685. and the internet has provided plenty of suggestions. Basically, it seems like the current draw from multiple servos is too much for either a) the small wires I have connected to my power source,  the cheap P-type polarity circuit on the board, or c) I have no idea.
the cheap P-type polarity circuit on the board, or c) I have no idea.  At any rate, I am still working through it. it has eaten many hours so far.
At any rate, I am still working through it. it has eaten many hours so far.
Great suggestions: here are some thoughts
- I am sorry to read about issue. I hope it is not big.
yes, this is depressing. the board isn't burnt, but I know now that it is a power issue by the bigger servos. I really need a better portable power solution
- What are your servos ?
These are the big heavy MG995 type servos. and I REALY REALY hope I don't have the issue you are going through with the torque! (looking forward to you test results!)
- for the mirror leg, no problem. We shall see at this time.
yeah - I don't think I am free of this issue. but I have to solve #1 first. anyway, I am hoping the mirror is just reversing the angels by 180.
Can you show us the code between 2 spoiler tags
ha ha ha, NO, I am way to embarrassed by my messy code! ok, let me solve issue #1 and then I will clean it up and post (with spoilers)
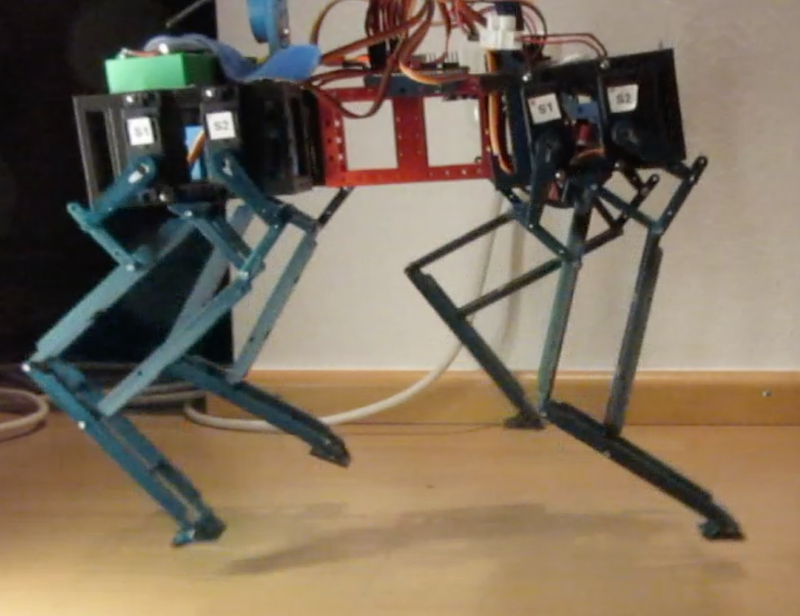
- You must think about to put the quadruped on a stand. It is better for testing.
done and done - thanks for the tip. actually, mojo4 has been cut up into pieces and is splayed out over my desk while I work this voltage issue. but when the gaits come - it will be back on my makeshift stand. (I knew those wine boxes would be useful some day!