
Je laisse Ash de coté un moment. J'ai besoin d'une étape intermédiaire dans mon apprentissage. Je vais me servir de ce projet pour en apprendre plus sur la pratique de l'odomètrie.
Alors ce projet utilisera 2 capteurs de distance laser http://www.robot-maker.com/forum/topic/10721-capteur-de-distance-laser-vl53l0x/?p=75942 sur un servo pour scruter son environnement à 360°.
La tourelle sera posée sur une plateforme roulante abritant un arduino, un raspberry, un pont en H, un convertisseur DC-DC 12-5V et un batterie 12V.
L'arduino pilotera le pont en H et recevra les impulsions des roues codeuses. Il pilotera aussi le servo de la tourelle et les 2 lidars.
Le raspberry commandera l'arduino et transmettra les informations captées via une interface web. J'utiliserai NodeJS pour programmer le raspberry.
Hector a pour objectif initial de se frayer seul un passage dans mon appartement. Je vais réutiliser ce que j'ai appris avec Ash pour ce projet en retirant la complexité du capteur d'inclinaison. C'était un peu ambitieux pour moi comme démarrage.  Je reviendrai sur Ash plutard.
Je reviendrai sur Ash plutard.
Je laisse aussi de coté mon imprimante 3D qui me prend trop de temps. Je vais faire le chassis avec des composants de CNC, des plaques de plastique et un fraiseuse.
Voilà, je commence mon cours d'odomètrie. Je posterai ici l'avancement de ce projet. En espérant que Hector sera plus sage que Ash. 

#1

-
- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 06 novembre 2016 - 10:27
#2
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 07 novembre 2016 - 07:40
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#4
-

- Membres
-
- 156 messages
Membre occasionnel
- Gender:Not Telling
- Location:Bretagne
Posté 07 novembre 2016 - 08:29
Super projet !
Mace Robotics - Conception & réparation électronique

#6
-

- Membres
-
- 157 messages
Membre occasionnel
- Gender:Male
- Location:Montigny le Bretonneux
Posté 07 novembre 2016 - 10:32
Questions, qu est ce que tu utilises comme batterie 12v ?
#7
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 07 novembre 2016 - 12:11
Merci pour vos encouragements 
La batterie : 10 accus de 1,2V NiMH trouvé chez conrad. http://www.conrad.fr/ce/fr/product/206040/Pack-accus-stick-NiMH-Sub-C-Conrad-energy-12V-3700mAh-Tamiya
#8
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 12 novembre 2016 - 12:09
Première étape, la tourelle.
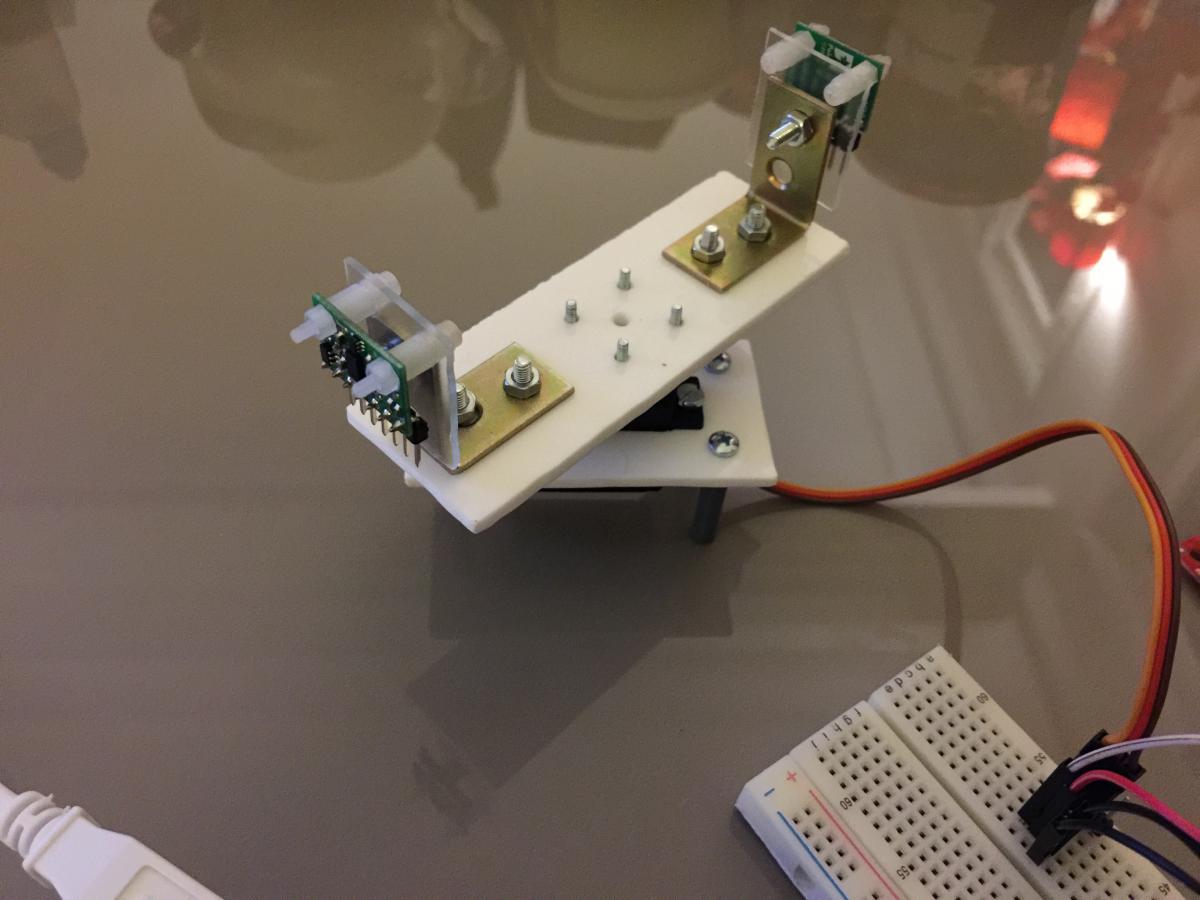
J'ai pris le HD-1705MG de Power HD. Et selon le vendeur : "Amplitude: 210° à +/-10°C selon les spéficiations (donc 0 à 180° assuré :-) )".
Mais impossible d'obtenir cette amplitude ... 
Sur cette video, c'est pourtant avec l'interval 500 - 2300us.
Si je prend les spec du fabriquant :
6.Control Specification:
No.
Item
Specification
6-1
Control system
Pulse width modification
6-2
Amplifier type
Analog controller
6-3
Operating travel
45° (when1500→2000 μsec)
6-4
Neutral position
1500 μsec
6-5
Dead band width
4 μsec
6-6
Rotating direction
Clockwise (when1500→2000 μsec)
6-7
Pulse width range
800→2200 μsec
6-8
Maximum travel
Approx 145°(when 800→2200 μsec)
Je crois que je me suis fait avoir.
- ashira aime ceci
#9
-

- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 12 novembre 2016 - 09:04
Pour une même marque de servomoteur il n'est pas rare de devoir descendre en dessous de 500 et/ou de monter au dessus de 2300 pour obtenir un mouvement de 0°-180°.
Opération de recherche min et max absolument nécessaire pour chaque servo.....
#11
-
- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 12 novembre 2016 - 12:19
Pour résoudre mes problèmes de stabilité (vibrotements) et pour un bon centrage à 90° j'ai acheté des towerpro originaux : http://www.towerpro.com.tw/product/mg995-robot-servo-180-rotation/
Ou revendeur agréer : https://hobbyking.co...-20sec-55g.html
Servo avec marque fabriquant sur le boitier (TowerPro et non TowarPro !!!) + pastille test présente...
Depuis tranquille........et seulement 4$50 de plus/servo que sur AliChiotte !!!
#13
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 12 novembre 2016 - 12:53
Perso j'ai des
- 1501MG de chez Power HD ça fonctionne nickel. Alie
- Deux versions de de servo de chez JX Servo, ça parait prometteur à voir par la suite. Alie
- Deux Hitec et là surprise je m'attendais à mieux vu la réputation qu'ils ont (je crois même qu'il y en a un qui souffre déjà). Boutique du coin
- et Trois Corona que j'avais pris en test pour le cou. Hobbyking
Faut que je test aussi ça sur une autre carte contrôleur de servo ^^
#15
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 13 novembre 2016 - 04:49
Pour le moment, ils ont reconnu le défaut d'amplitude. Affaire à suivre.
Et, pour montrer un peu plus à quoi va ressembler Hector :
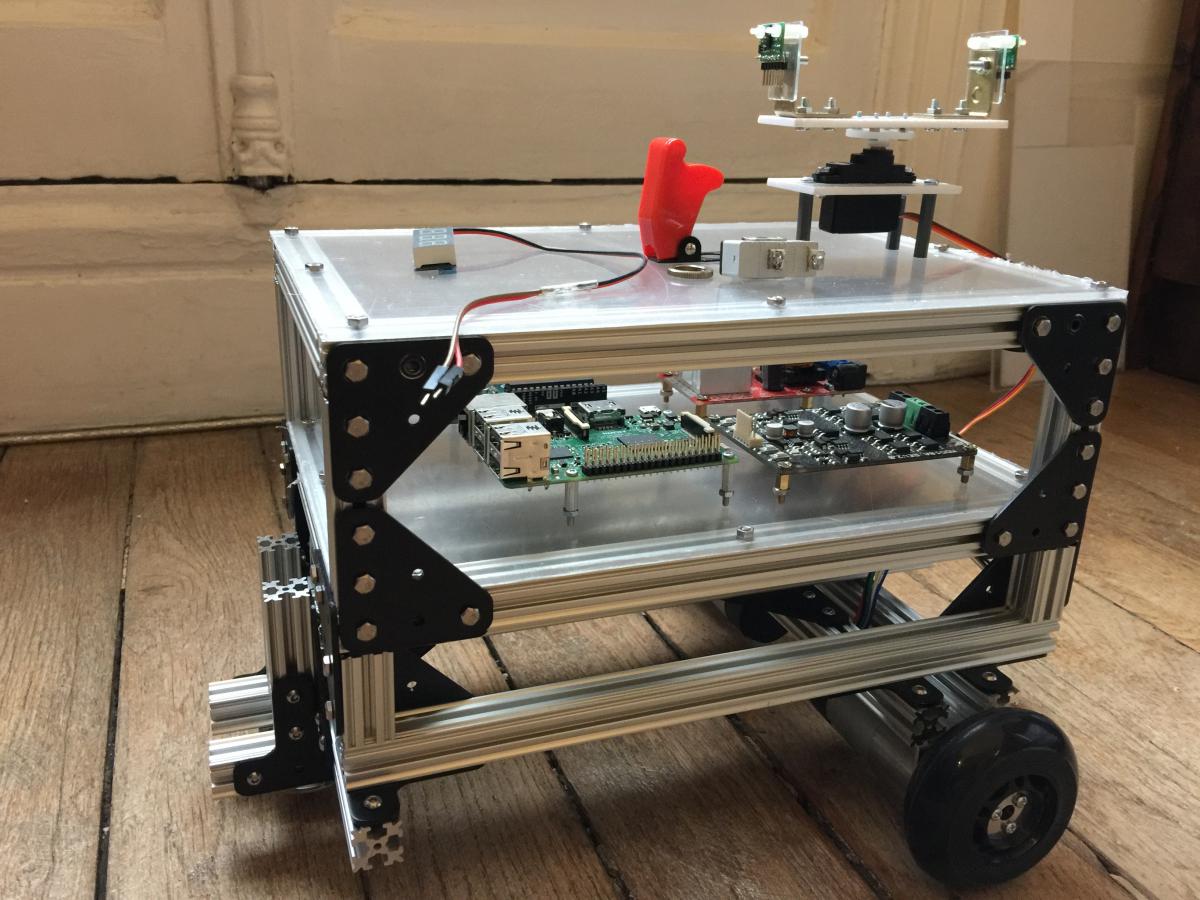
On ne voit pas la roue folle en bas à gauche et la pile de 12V qui fait toute la longueur du premier étage sous le raspberry.
- ashira aime ceci

#20
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 14 novembre 2016 - 06:55
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : VL53L0X, Odomètrie, RPLIDAR A2, Arduino Due



1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




