Je reviens avec mon histoire ......
Je suis à la recherche des caractéristiques des moteurs que l'ont peut trouver dans les servomoteurs.....C'est bien difficile de trouver la puissance de ces moteurs, les tr/mn, le couple en sortie d'axe.....
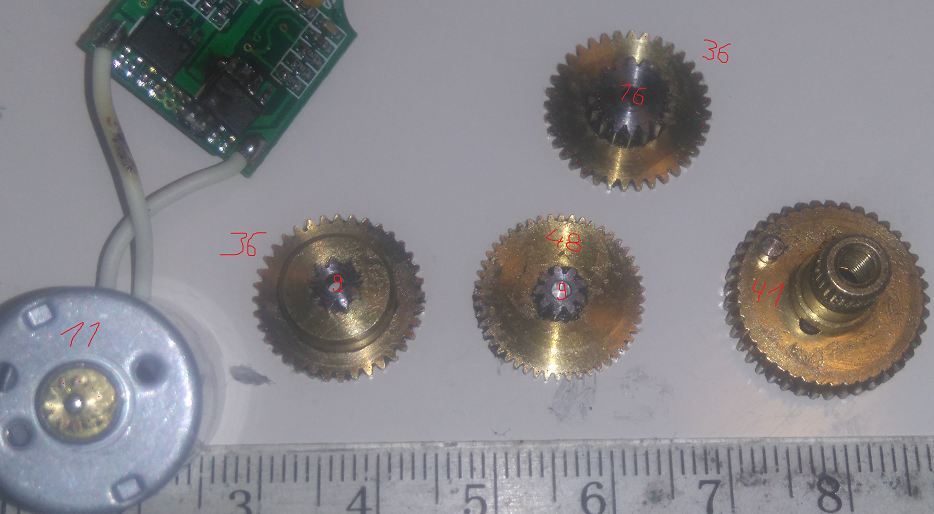
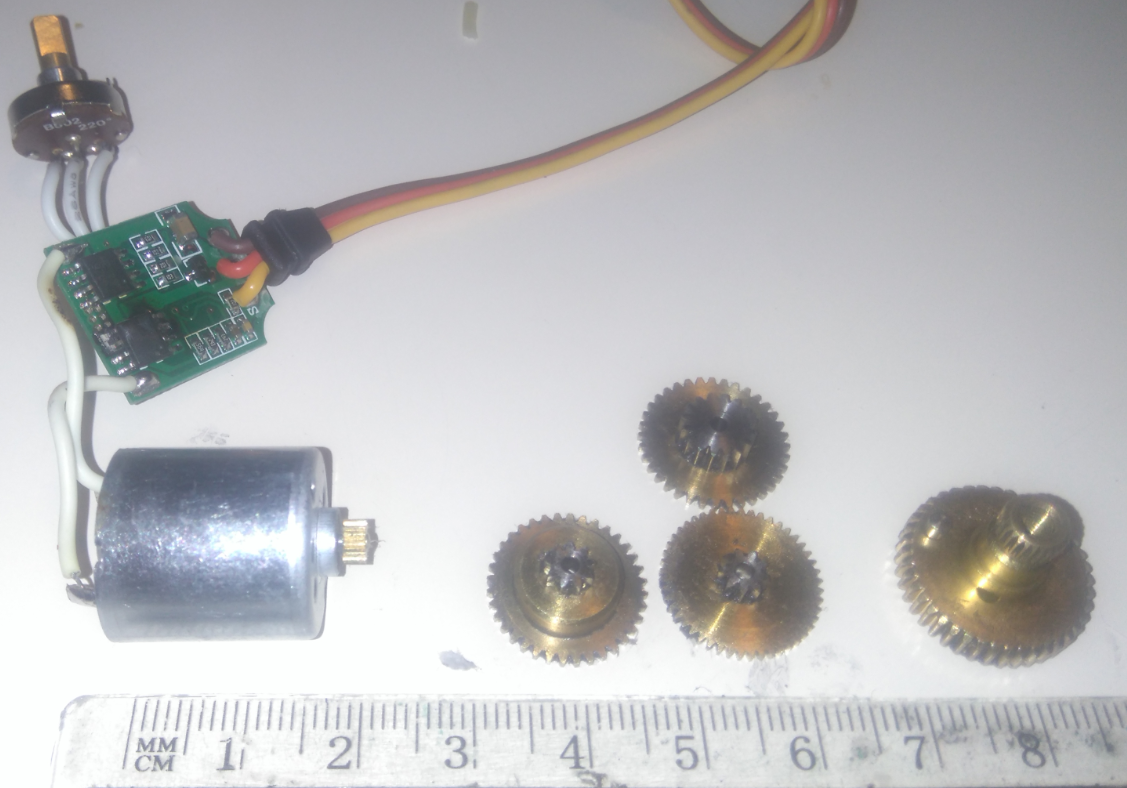
J'ai trouvé sur un site les informations suivantes : La vitesse maximale de rotation du palonnier est de l’ordre de 100 tr/mn (0,1 s pour 60°), alors que le moteur d’entraînement tourne lui typiquement à 50 000 tr/mn. Il faut donc réduire sa vitesse de rotation à l’aide d’un réducteur. Le réducteur est presque toujours constitué d’un train d’engrenages en cascade....Un servo typique comprend cinq étages de réduction en cascade. Les rapports de réduction des étages s.......... à titre d’exemple sont de 29/8, 38/10, 38/10, 28/10, 28/12, ce qui donne une réduction totale de 464.
Ok, 50 000 tr/mn..........
Bon si je fais un calcul rapide en ne prenant pas en compte le couple résistant du réducteur et pose pour hypothèse1 un rendement de l'ensemble de 0.9 ..... :
Ns = 67 tour/mn (0.15s/60°), vitesse de sortie en tr/mn
Cs = 20kg/cm, couple de sortie en kg/cm
Cs = 1.96133 N.m, couple de sortie en N.m
ωs = 4.46 rad/s, vitesse de sortie en rad/s
Donc Ps = 8.76 Watts
soit un rendement global η glob = 0.9
La puissance moteur devrait être de :
Psortie / η glob = Pmoteur = 9.73 Watts, soit un moteur de 10 Watts !
Partons sur l'hypothèse 2 d'une alimentation à 6 Volts.......Avec P=U*I, je calcule l'intensité consommé par le moteur soit 1.66 ampères. Soit 2 ampères.
Sur l'hypothèse 3 d'une réduction R = 500, Ns = 100 tr/mn et Cm = 0.04 kg/cm......
il me faudrait donc un moteur de 10 watts, pouvant être alimenter en 6 volts, pouvant tenir 2 ampères, tournant à 50 000 tr/mn et possédant un couple de 0.04 kg/cm....
Ou un moteur de 10 watts, pouvant être alimenter en 6 volts, pouvant tenir 2 ampères, tournant à 10 000 tr/mn (R = 100) et possédant un couple de 0.2 kg/cm....
Je suis un peu dubitatif devant mes calculs !!!????
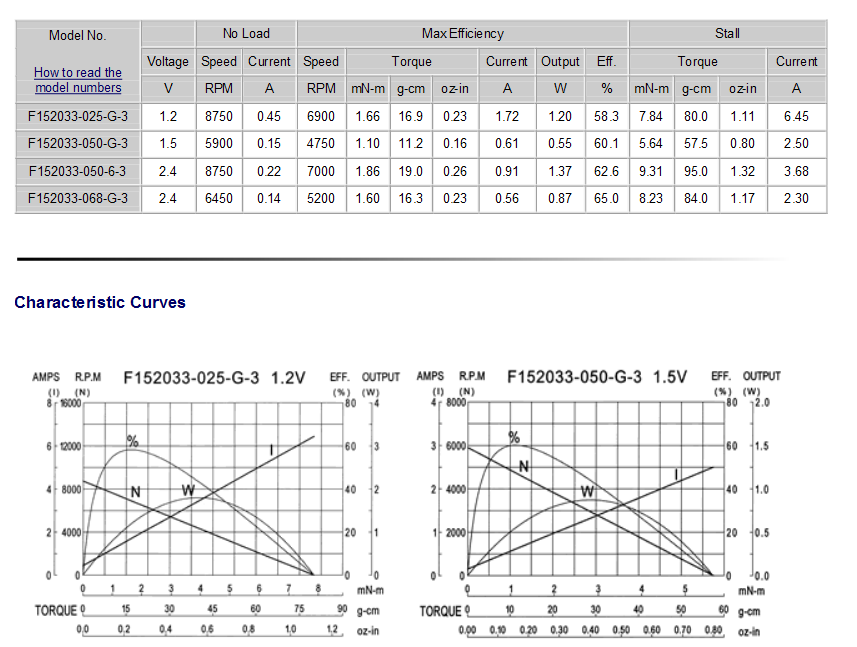
On trouve bien des moteurs qui tournent à plus de 20 000 tr/mn sous 6 volts mais il font 2/3 Watts .....Et pour ce qui est de connaître le couple alors là .....
Qu'en pensez vous?
++



















{kind=link}