Ahah ça y est Oracid ce lance ! bon courage, j'ai hâte de voir comment tu fais avec 4 servos , surtout ceux ci qui sont vraiment faibles , j'avais essayer avec le même modèle mais le chassie et la batterie étaient trop lourds pour ces petits servos , le résultat : un bruit infect car les servos forcent en permanence et un vitesse de déplacement de 0.00001 km/h 

Yorkshire, mon petit quadrupède
Débuté par Oracid, mai 04 2017 06:16
76 réponses à ce sujet
#21

yougo
-

- Membres
-

- 235 messages
Membre occasionnel
Posté 08 mai 2017 - 06:59
#22
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 08 mai 2017 - 07:12
Le but, c'est de commencer petit, d'acquérir des compétences pour arriver à une taille équivalente à SpotMini.j'avais essayer avec le même modèle ...
Mais cela ne se fera qu'en se reposant sur une succession d'échecs qui nous montreront la voie ........ à ne pas suivre.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#23
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 08 mai 2017 - 07:47
J'avais bien compris ton objectif Oracid  bon courage
bon courage
#24
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 08 mai 2017 - 04:15
J'ai modélisé le petit servo SG90, http://www.robot-maker.com/shop/moteurs-et-actionneurs/18-servomoteur-9g.html
C'est ma première modélisation avec Fusion360.
En définitive, j'ai choisi de faire le chassis en 3D.

C'est ma première modélisation avec Fusion360.
En définitive, j'ai choisi de faire le chassis en 3D.
- Oliver17 aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#25
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 08 mai 2017 - 06:06
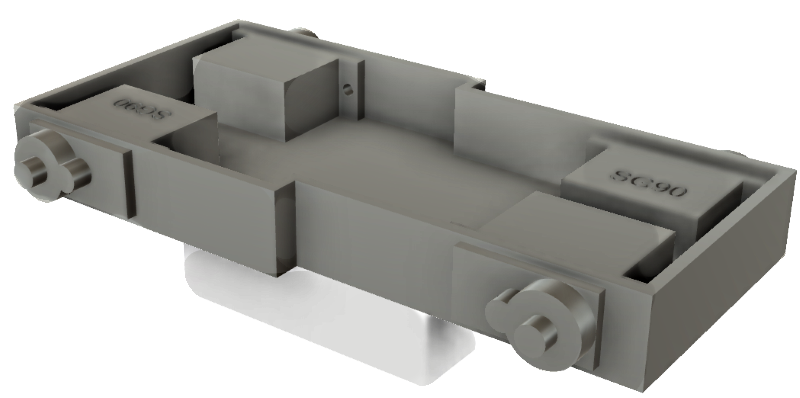
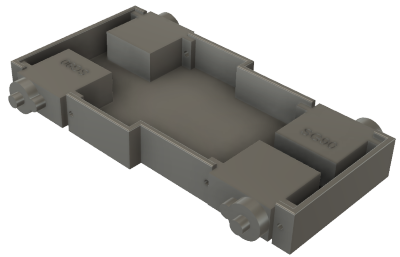
Voici un petit aperçu du chassis avec ses 4 servos et le boitier à piles, en dessous.
Les pattes avants et arrières ne seront pas sur le même plan, ainsi elles ne se télescoperont pas.
Les pattes avants et arrières ne seront pas sur le même plan, ainsi elles ne se télescoperont pas.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#26
Budet
-

- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 08 mai 2017 - 07:21
Pas mal du tout pour un début !!
Un petit conseil esthétique, met des petits congés (0.5 - 1 - 2 mm en fonction) sur les arrêtes qui ne sont pas fonctionnelles, ça rendra mieux 
Edit : Tu aurais pas oublié les troues sur ton chassis pour fixer les servos ? Si tu veux percer à la "main" c'est bien de mettre des diamètre plus petit en temps que pré-perçage
#27
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 08 mai 2017 - 08:06
Oui, Budet, pour les arrêtes, ce sera vraiment pour te faire plaisir.
Pour les trous, j'y avais pensé, mais je pas encore assez pour les aligner avec les trous du servos, mais je vais voir ça.
Pour les trous, j'y avais pensé, mais je pas encore assez pour les aligner avec les trous du servos, mais je vais voir ça.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#28
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 mai 2017 - 07:58
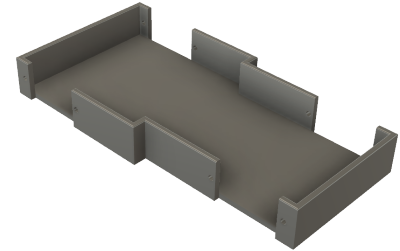
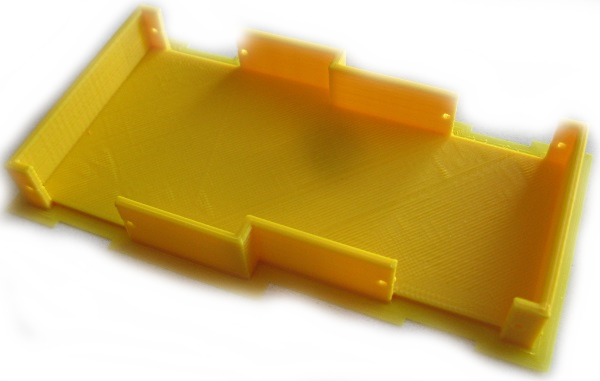
J'ai redessiné le chassis, avec les trous et tout et tout.
Et voici les premiers essais. Durée, 1h30 à chaque fois.
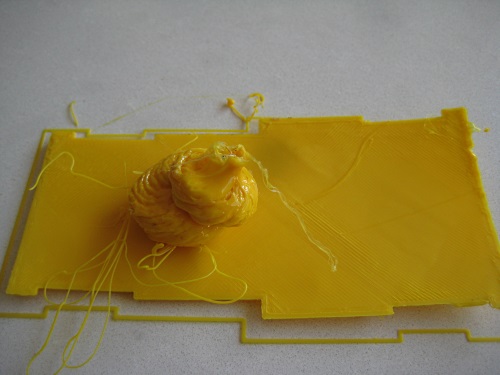

C'est pas gagné !
Et voici les premiers essais. Durée, 1h30 à chaque fois.
C'est pas gagné !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#29
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 09 mai 2017 - 08:56
Wow j'ai jamais vu une impression comme ça ! Ca vient de quoi ? de ton imprimante ?
#30
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 mai 2017 - 09:06
C'est du warping. La partie plane se relève sur les bords, puis en mon absence ça s'emmêle sur la buse.Wow j'ai jamais vu une impression comme ça ! Ca vient de quoi ? de ton imprimante ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#31
Mike118
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 09 mai 2017 - 09:36
tu utilises de la laque ?
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#32
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 09 mai 2017 - 10:22
Dans le Cura de Dagoma tu peut utiliser "améliorer la surface d'adhésion". Je me trompe peut être mais je vois que tu ne l'as pas utilisé la, ça marche super bien pour moi
#33
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 mai 2017 - 05:57
Non.tu utilises de la laque ?
Je vais voir ça.Dans le Cura de Dagoma tu peut utiliser "améliorer la surface d'adhésion". Je me trompe peut être mais je vois que tu ne l'as pas utilisé la, ça marche super bien pour moi
Mais je ne vais pas m'emm... avec ça. Ce n'est pas mon objectif.
Je fais une dernière tentative en séparant le plancher et les parois, puis je fais ça en carton.
Mais là, jusqu'à la fin de la semaine, ça va être compliqué de m'isoler. Donc, ne soyez pas surpris si je ne réagis pas.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#34
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 mai 2017 - 09:54
Merci Budet.
Grâce à toi, un petit pas pour l'humanité, mais un grand pas pour moi...
Grâce à toi, un petit pas pour l'humanité, mais un grand pas pour moi...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#35
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 10 mai 2017 - 10:07
Ah je suis content ! Le résultat est nickel, bien joué Tu vois, je trouve que l'impression 3D permet d'avoir des meca sophistiqué, rapidement avec une bonne qualité. Ca aurait été dommage de ne pas s'en servir
- Oliver17 aime ceci
#36
Ulysse
-

- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 10 mai 2017 - 06:14
Ha oui ! Joli !
#37
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 mai 2017 - 06:11
J'ai fait les pattes en 3D.
L'idée, c'est de voir les pattes comme un prolongement des palonniers en faisant une empreinte suffisamment profonde pour y loger le palonnier. Le tout étant maintenu par la vis d'origine du palonnier.

L'idée, c'est de voir les pattes comme un prolongement des palonniers en faisant une empreinte suffisamment profonde pour y loger le palonnier. Le tout étant maintenu par la vis d'origine du palonnier.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#38
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 mai 2017 - 06:45
Je vais attaquer le câblage.
Beaucoup de mal à trouver un schéma de l'Arduino Nano qui réponde à mes interrogations.
Voici un schéma de connection simple, mais il n'indique pas à quoi correspond le connecteur 6 broches.
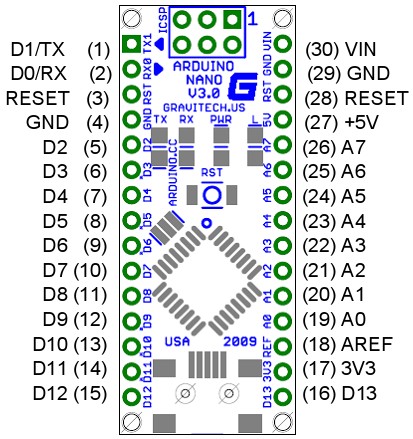
Sur le site officiel, https://www.arduino....rduinoBoardNano, il est indiqué qu'une alimentation 6-20V non régulé doit être connectée à la pin 30. Ce n'est pas ce que j'ai vu un peu partout. Je vais m'en tenir là, mais si vous avez une contre indication, merci de m'en informer.
Beaucoup de mal à trouver un schéma de l'Arduino Nano qui réponde à mes interrogations.
Voici un schéma de connection simple, mais il n'indique pas à quoi correspond le connecteur 6 broches.
Sur le site officiel, https://www.arduino....rduinoBoardNano, il est indiqué qu'une alimentation 6-20V non régulé doit être connectée à la pin 30. Ce n'est pas ce que j'ai vu un peu partout. Je vais m'en tenir là, mais si vous avez une contre indication, merci de m'en informer.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#39
arobasseb
-

- Administrateur
-
- 737 messages
Membre passionné
- Gender:Male
- Location:BORDEAUX (33)
- Interests:Informatique, robotique et sciences technique en générale.
Posté 12 mai 2017 - 07:28
Pour l'alimentation, soit tu passe par l'USB soit par la broche 30 qui est reliée à un régulateur de tension 5V (d'où la plage d'entrée de 7 à 12V ).
Je ne sais pas avec quelle pile tu veux l'alimenter, mais je pense qu'une pile carrée de 9v serai idéale, plutôt que 4 pile de 1,5 qui ferai 6V et qui serai juste pour que le régulateur de tension fasse sont job correctement.
Quant au connecteur 6 broches, si je ne me trompe pas c'est pour pouvoir reprogrammer le microcontrôleur (changer le bootloader), via un module à brancher dessus.
#40
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 mai 2017 - 09:58
Sur le lien officiel que je donne plus haut, il parle de 6-20V.Pour l'alimentation, soit tu passe par l'USB soit par la broche 30 qui est reliée à un régulateur de tension 5V (d'où la plage d'entrée de 7 à 12V ).
Cela a déjà été acté et validé plus haut. J'alimente avec 4 piles AAA, soit 6V, dans un boitier à plat.
Pour le connecteur 6 pins, je vais le dessouder. Il me gène plutôt qu'autre chose et je n'en ai pas la nécessité.
Merci pour ta réponse.
Ma chaine YouTube : https://www.youtube..../oracid1/videos








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

