Voici mon nouveau projet. Il est mignon, n'est ce pas ?
Vous l'aurez compris, il s'agit d'un quadrupède de petite taille, voir de très petite taille, pour commencer.
L'objectif est de me familiariser avec les problèmes de servos tout en m'initiant également à ceux du quadrupède.
Pourquoi un quadrupède ? Et bien, parce que j'ai l'intuition que les hexapodes ne sont pas forcément plus facile à mettre en oeuvre.
Je ne ferais pas de modélisation car je n'ai aucune idée des contraintes de ce genre de projet. J'utiliserai du matériel pas cher qui me permettra de m'adapter à moindre coût.
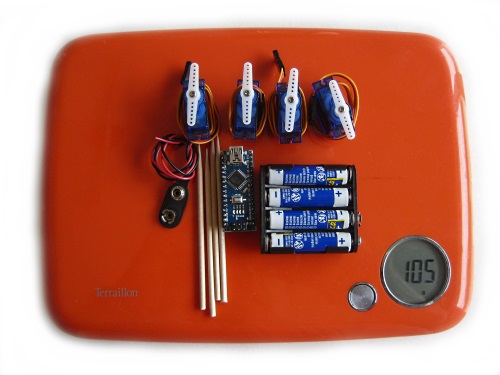
Voici les caractéristiques que j'ai défini pour le moment :
- poids et taille, le plus léger et le plus petit possible, j'espère ne pas dépasser les 150g
- Arduino Nano, http://www.robot-maker.com/shop/cartes-programmables/46-clone-arduino-nano.html, http://www.robot-maker.com/forum/topic/10559-arduino-nano-testee-par-jekert/
- 4 petits servos SG90, http://www.robot-maker.com/shop/moteurs-et-actionneurs/18-servomoteur-9g.html, http://www.robot-maker.com/forum/topic/10572-servomoteur-9g-sg90-teste-par-jekert/ ,
- structure en carton ou plastique de couverture de classeur.
- jambes, des pailles. Si vous avez une meilleure idée...
- pile 9V. Là j'hésite car elle est assez lourde, 45g. Là aussi, si vous avez une meilleur idée.
Voilà pour commencer.
C'est vrai que je commence petit, ce qui n'est pas dans mes habitudes, mais avant de me lancer dans un projet d'envergure à l'échelle d'un SpotMini, il faut que j'acquière quelques compétences pour un moindre coût. Et surtout, je voudrai tordre le cou à tous ces problèmes de servos rencontrés par plusieurs membres du forum.
C'est vrai que j'ai pas mal de sujet en cours, mais je n'abandonne rien, que ce soit l'imprimante 3D, le char à géométrie variable et mes test sur les gros servos ou gros moteurs. En fait, tout est lié. Quand j'utilise de gros servos, cela fait avancé mon char et simultanément mon gros quadrupède. Quand j'avance sur l'imprimante, j'acquière des compétences en CAO, etc.
Merci d'avance pour vos remarques et contributions.