
Dans la description de la video il dit "The track robot can change its shape while actuated using 2 motors only (3 motors in the current design)" .
Le robot peut changer sa forme durant son actionnement en utlisant 2 moteurs (3 moteurs dans le design actuel) .
On peut voir un cable au dessus et en dessous des vertebres, j'imagine qu'ils servent a tordre le robot d'un sens ou de l'autre (1 moteur pour chaque cable ? et un autre pour faire avancer la chenille) .

817 réponses à ce sujet
#581

Little french kev
-

- Membres
- 110 messages
Membre
Posté 21 février 2020 - 10:59
#582
Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 22 février 2020 - 08:42
Dans la description de la video il dit "The track robot can change its shape while actuated using 2 motors only (3 motors in the current design)" .
Le robot peut changer sa forme durant son actionnement en utlisant 2 moteurs (3 moteurs dans le design actuel) .
On peut voir un cable au dessus et en dessous des vertebres, j'imagine qu'ils servent a tordre le robot d'un sens ou de l'autre (1 moteur pour chaque cable ? et un autre pour faire avancer la chenille) .
Oui, j'ai bien vue tout ça. Tu peux trouver des exemples en cherchant "tentacle robot" surYouTube.
Mais à mon avis, le système est beaucoup plus original et complexe qu'il n'y parait.
Par exemple, la chenille est très sophistiquée. En regardant de près, on peut voir des rouleaux sur chaque élément. C'est la première fois que je vois ça.
D'habitude, à l'intérieur d'une chenille, il y a des roues qui frottent sur la chenille. Là, il n'y a pas de roue, mais des éléments fixes, mais articulés, qui frottent sur des rouleaux intégrés à la chenille. C'est très astucieux.
Ces vertèbres sont maintenues entre elles par un axe centrale articulé. Les vertèbres étant orientées par des cables.
Voici un exemple, mais il y en a mille autres :
- Forthman et Little french kev aiment ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#584
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 01 avril 2020 - 12:46
Ce mec est vraiment un monstre
Mais non ! Le risque avec un enfant de cet age et même après, c'est de faire attention qu'il ne bouffe pas une araignée ou un ver de terre.
Je dis ça, c'est du vécu...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#585
Budet
-

- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 02 mai 2020 - 10:02
On parle beaucoup de Boston Dynamics mais ces gars là ont aussi largement relevé le défis !
https://www.youtube....h?v=2H3dzZEi-qw
- Forthman aime ceci
#586
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 03 mai 2020 - 06:34
On parle beaucoup de Boston Dynamics mais ces gars là ont aussi largement relevé le défis !
Les chinois relèvent tous les défis avec succès.
Ce quadrupède est d'autant plus exceptionnel qu'il pèse 12kg, soit moitié moins que SpotMini de Boston Dynamics qui de mémoire pèse 25kg.
- Budet aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#587
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 05 mai 2020 - 07:21
Oui, c'est vrai qu'il est génial ce robot. Il y a plusieurs vidéos. Je ne vous propose pas la dernière qui vient de sortir, mais deux vidéos qui datent de 2013.
Sur la première vidéo, on voit une étude magistrale de la marche. Mais bon, perso, j'en vois tous les jours.
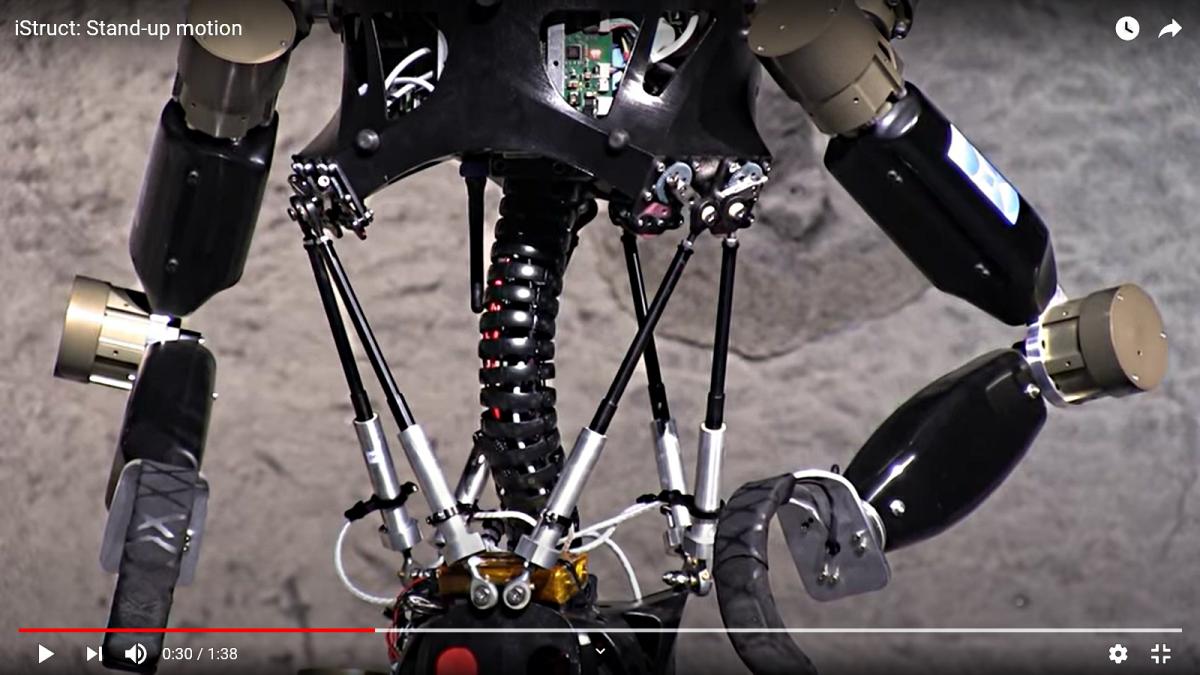
Ce qui m'a le plus impressionné, c'est sur la deuxième vidéo, c'est le mécanisme d'activation des vérins du torse.
C'est vrai que je suis bon public, mais s'ils insistent là-dessus, c'est qu'ils pensent également que leur idée est géniale. Et elle est géniale !!!
Regardez, à 0'22", montée, descente et translation à gauche et à droite du buste. A 1'00", rotation du buste. A 1'10", inclinaison latérale du buste.
Tous ces mouvements sont dû à des vérins(à ressort, sans doute). Jusqu'à là, rien de nouveau, mais regardez bien comment sont actionnés les vérins.
Ces vérins sont actionnés par des servos rotatifs qui activent une de leur extrémité. Ce mécanisme transforme un mouvement rotatif en un mouvement linéaire.
Ce mécanisme est géniale parce qu'il est très simple à mettre en oeuvre.
Habituellement, les vérins sont munis d'une vis mis en rotation par un moteur électrique et d'une électronique de positionnement. Tout ceci est très lourd et très encombrant.
Ce mécanisme, n'est certainement pas nouveau, mais c'est la première fois que je le vois utilisé sur un bipède.
Notez que le torse avec ses vérins est activé par un mécanisme "parallèle". C'est ce principe qui est par exemple est utilisé sur les imprimante 3D Delta.
Par contre, les membres sont actionnés par un mécanisme "série". Les moteurs sont positionnés aux articulations. Là, bizarrement, le mécanisme est assez lour et fait appel à la rotation des moteurs et à des vérins plus classique, me semble t-il.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#588
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 05 mai 2020 - 10:31
Tous ces mouvements sont dû à des vérins(à ressort, sans doute).
Et bien, je me suis trompé. A y regarder de plus près, ces tiges ne s'interpénètrent pas. Ce ne sont pas des vérins.
La tige noire pénètre dans le fourreau par vissage certainement, mais ce doit être juste pour un ajustement fin de la longueur.
En fait, ces tiges fonctionnent comme des bielles. Sur Ali, ça s'appelle des arbres de transmission. Ils sont très utilisés dans le modélisme Auto. https://fr.aliexpres...8#2717#7558#156
Voici une image en gros plan de cette mécanique "Parallèle" à 6 arbres. Ce sont des mouvements à 5 barres comme sur mes quadrupèdes.
Mais ici, les servos sont à la pointe du V, et non pas aux extrémités des bras du V. Mais c'est vrai que l'on peut considérer les V alternativement dans un sens puis dans l'autre sens.
Cliquez moi.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#589
Melmet
-

- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 06 mai 2020 - 11:20
Je suis tomber sur cela par hasard:
Je trouve que c'est une autre vison des bras robotique pas trop mal.
https://www.youtube....h?v=f6luI7hJuj4
#590
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 06 mai 2020 - 01:14
Je suis tomber sur cela par hasard:
Je trouve que c'est une autre vison des bras robotique pas trop mal.
Je suis ses vidéos régulièrement.
C'est du lourd et du cher. C'est pour un bras fixe, sur table. James Bruton y fait référence, c'est dire si c'est lourd.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#591
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 06 mai 2020 - 08:38
Ce mec a une vrai approche scientifique à ce qu'il fait contrairement à James
#592
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 06 mai 2020 - 09:03
Ce mec a une vrai approche scientifique à ce qu'il fait contrairement à James
Peut-être, mais James a fait un grand nombre de robots, surtout des bipèdes.
Alors que Skyentific est plus dans une logique de recherches et d'études, particulièrement sur les articulations. Mais pas beaucoup de réalisations.
Ce sont des approches très différentes.
Je ne sais pas quelle formation a, James Bruton, mais il me semble très compétent. Même si je ne ferais pas des robots à sa manière si j'avais les mêmes compétences.
Voilà ce que je ferais si j'en avais la compétence. Cela renvoie aussi bien James Bruton que Skyentific dans leur quartier.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#593
Little french kev
-
- Membres
- 110 messages
Membre
Posté 06 mai 2020 - 10:14
Je me rappel avoir entendu James Bruton mentionner dans certaines de ses videos qu'il était designer de jouet a l'origine . Sur son site il dit aussi qu'il est passionné d'electronique depuis toujours .
Je suis toujours impressionné par le volume de travail qu'il arrive a sortir tte les semaines . Entre la création des project et la partie vidéo je ne sais pas comment il arrive a tenir la cadence .
- Oracid aime ceci
#594
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 07 mai 2020 - 07:04
Je rebondis sur le quadruped présenté dans la vidéo, ci-dessus.
Il s'agit bien d'un robot faisable ! En Open Source, https://open-dynamic...tive.github.io/
Si vous voulez faire un quadrupède avec le meilleur de la technique, c'est un excellent choix !
Comme vous pouvez le constater, on est loin des 75kg de l'Open Dog de James Bruton.
Il est élaboré par des étudiants de l'Institut Max Planck de Stuttgart. Allemand, donc.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#595
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 10 mai 2020 - 12:33
Yes j'aime beaucoup ce quadruped, j'ai lu toute la doc associée, ils ont fait du bon boulot 
James a une approche trop empirique du problème, y'a un moment il faut mettre certaines chose en équation afin d'optimiser les performances du robot, chose qu'il ne fait jamais. Il est très bon en éléc et soft mais manque quand même à mon gout de compétence en design mécanique. Ça ne m’empêche pas de regarder toutes ses vidéos et d'y trouver un intérêt mais je regrette qu'il ne mette pas plus d’intérêt dans le dimensionnement de ces robots.
Le fait de définir préalablement le comportement cinématique de son quadruped lui permettrait de parfaitement dimensionner ses moteurs pour son application (chose que Skyentific fait fort bien), il devrait prendre plus de temps à analyser la répartition Puissance/Couple/Vitesse de Rot afin de choisir les meilleurs moyens de transmission (ce n'est pas pour rien que le MIT utilise deux transmissions planétaires et une par courroie). Aujourd'hui il part aveuglément sur de la transmission par courroie sans se poser la question du rapport de réduction optimal. De même pour le design de ses pièces plastiques, ça reste trop carré, trop gros, trop lourd.
Le robot d'open dynamique à vraiment bénéficier de cette approche, les articulations sont compacts, tous est compris dans les segments de membre, le volume mort est réduit au maximum, la transmission des efforts est bonne, il n'y a aucun frottement (bruit) et ils ont fait une analyse cinématique qui leur a permit d'identifier les bonnes longueurs de "jambes" .
James ne s'est pas assez sérieusement posé la question de la cinématique inverse pour son projet, il faudrait avoir une approche plus matriciel du sujet, il se crée des erreurs en omettant que le contact entre son pied de robot et le sol n'est pas ponctuel, le MIT on utilisé des sphères a rajoutes des offsets à l'articulation en fonction de l'orientation générale du robot. Or cela joue beaucoup dans le fait que son robot "glisse" car les solutions de ses équations ne sont pas bonnes
Pareil sur le pilotage du bout de la jambe, son approche est encore une fois trop empirique alors qu'il faudrait déterminer l'équation de la trajectoire souhaitée et l'interpoler afin de piloter chaque itération en vitesse constante pour gagner en fluidité de mouvement
Les moteurs brushless qu'il va utiliser son (enfin) la bonne solution, pareil pour leur répartition au sein du robot (mettre le moins de poids possible dans les jambes) mais je déplore un peu le temps que ça lui a pris d'arriver à cette conclusion et je pense qu'il n'est pas encore arrivé à la bonne solution. Vu le prix unitaire des moteurs j'espère qu'il passera un peu plus de temps à optimiser ce que je dis plus haut sinon ça sera à mon sens du gachit. Ca ne sert à rien de mettre le moteur le plus puissant du monde à une voiture si les pneus ne sont pas gonflés (c'est un peu l'effet que ça me fait de regarder ces vidéos).
Ces problématiques m’intéresse beaucoup, je suis en train de recréer toute une mécanique de quadruped sur Unity ou je peux tester mes hypothèses sans débourser un centime, optimiser ce qui doit l'être et une fois que je passerais à la réalisation physique, j'aurais, j'espère, levé un certain nombre d'incertitude
#596
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 mai 2020 - 01:07
Ces problématiques m’intéresse beaucoup, je suis en train de recréer toute une mécanique de quadruped sur Unity ou je peux tester mes hypothèses sans débourser un centime, optimiser ce qui doit l'être et une fois que je passerais à la réalisation physique, j'aurais, j'espère, levé un certain nombre d'incertitude
N'hésite pas à nous en parler au fur et à mesure de tes avancées. Ici, par exemple, https://www.robot-ma...11351-unity-3d/
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#597
pmdd
-

- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 10 mai 2020 - 05:26
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#598
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 mai 2020 - 06:15
Et oui, ça devait arriver ! Voilà la vidéo.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#599
Mike118
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 mai 2020 - 06:52
Ils ont des raspberry pi sur le dessus du robot avec clef 4G 
On pourrait mettre des spots mini sur https://www.vigibot.comça marcherait peut être mieux que leur système de pilotage qu'on a vu que 2 secondes par ce que ça laguait
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#600
Forthman
-

- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 16 mai 2020 - 11:35
Une imprimante analogique entièrement mécanique ! 
Comme la vidéo n'est pas toute jeune ça a peut-être déjà été partagé ici, mais je viens juste de la voir
edit: je viens de faire un tour sur les vidéos de ce gars, et c'est un grand malade la technique pour redresser du fil de fer est magique ! 






1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

