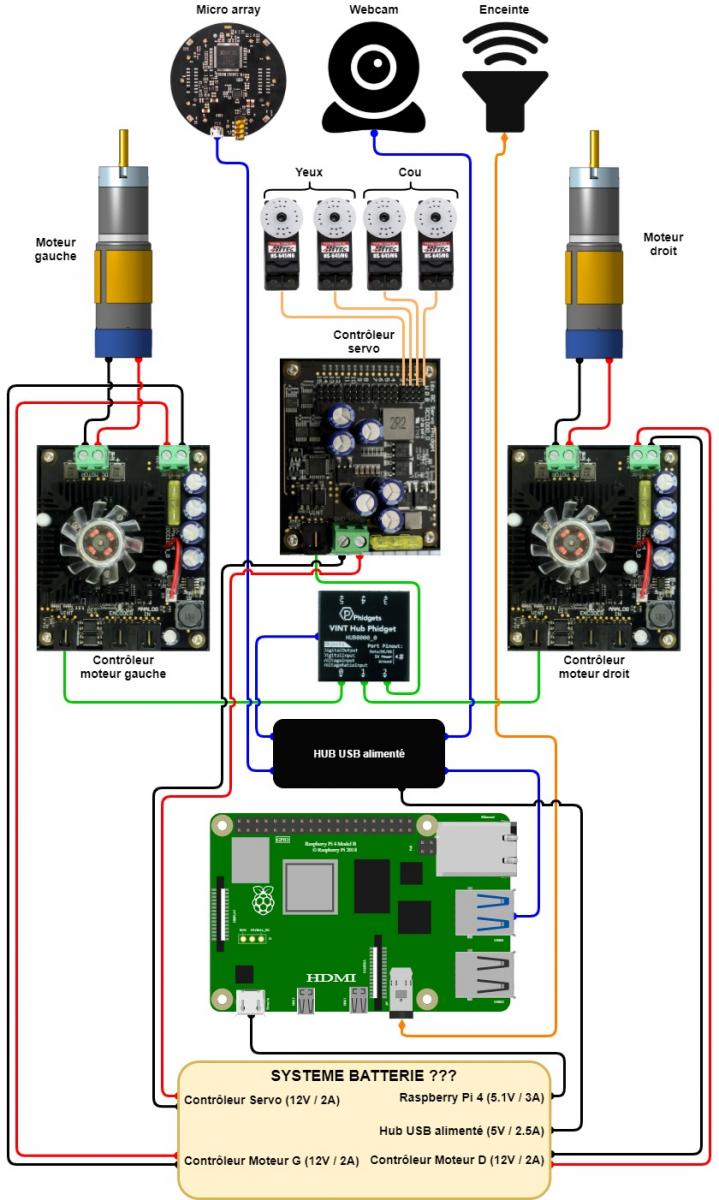
Voilà. J'ai fait un petit schéma de toute l'électronique actuelle du robot. Je viens donc vous demander un peu d'aide pour le choix de la batterie et tout ce qui est branchement. J'aimerais, si possible, avoir un système assez simple : batterie, bouton on / off, et la connectique. Ayant des connaissances très basiques dans ce domaine, je suppose que ce que je veux est peut-être un peu trop simpliste et que je vais être confronté à certaines difficultés. Je pense notamment à la conversion 12V -5V si je choisis de partir sur une seule batterie.
Sur le schéma, j'ai indiqué l'ensemble des modules qui ont besoin d'être alimentés. Entre parenthèses, les tensions et intensités de sortie indiquées sur chacun des adaptateurs officiels branchés actuellement sur le secteur. Sachant que le robot fonctionne dans cette configuration, je pense que ces valeurs sont bonnes même en mode "batterie". Mais je me trompe peut-être ... Voici un récapitulatif des valeurs :
- contrôleur servo : 12V / 2A
- contrôleur moteur gauche : 12V / 2A
- contrôleur moteur droit : 12V / 2A
- Raspberry Pi 4 : 5.1V / 3A
- Hub USB alimenté : 5V / 2.5A
Je souhaiterais que le robot tienne la charge pendant 1h (ou plus si possible) sans pour autant rouler tout le temps. Est-ce trop ambitieux ?
Donc, voici mes questions :
- Faut-il des batteries différentes ?
- Quelle(s) batterie(s) choisir (type, voltage, capacité, ...) ?
- Quel fils ou connecteurs choisir ?
- Quelle grosseur de fils choisir (les fameux AWG) ?
- Comment faire les branchements ? Peut-être des cartes ou des branchements en Y, ou je ne sais quoi, sont nécessaires.
Sûrement que d'autres questions arriveront au fur et à mesure.
Merci.
Le schéma (fait avec l'outil en ligne draw.io) :












 Il faudrait que je trouve un système similaire pour cette partie-là, ou que je teste avec une vis plate comme vous m'avez conseillé.
Il faudrait que je trouve un système similaire pour cette partie-là, ou que je teste avec une vis plate comme vous m'avez conseillé.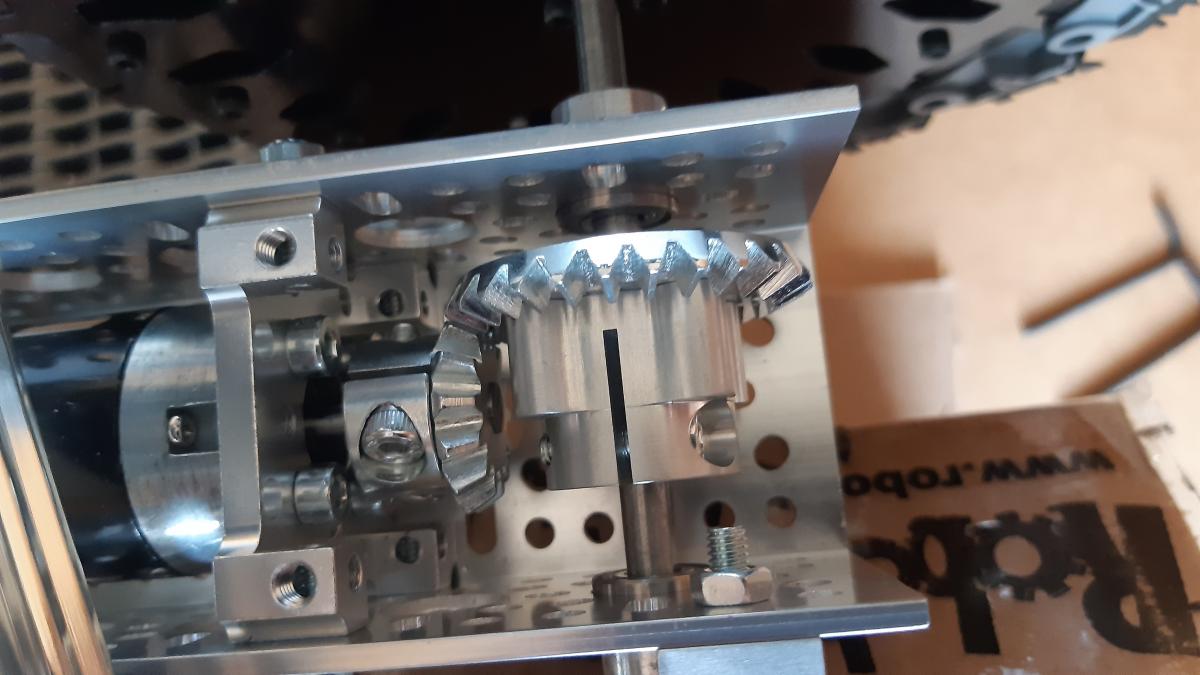
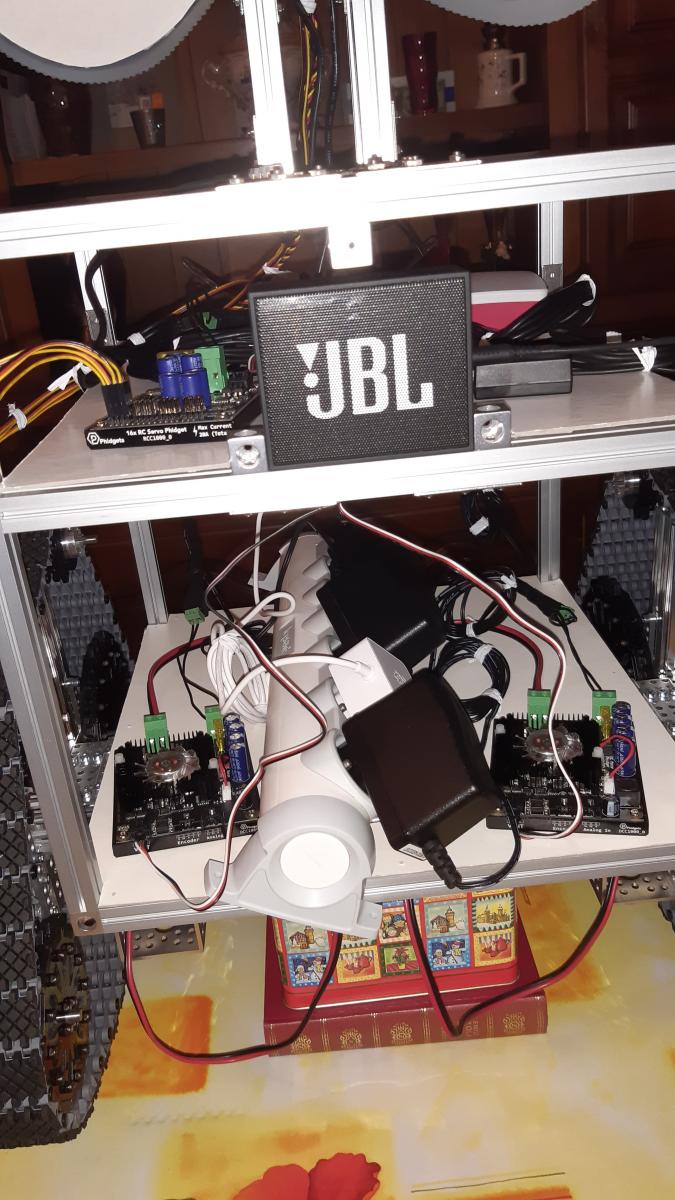

 ) et ne plus avoir cette multiprise qui traine derrière ! Mais pour cette partie-là, je ferai appel à vos lumières. Je vais d'abord lister tous les voltages / ampérages des cartes / contrôleurs que j'utilise pour savoir quelle(s) batterie(s) utiliser et comment brancher tout ça.
) et ne plus avoir cette multiprise qui traine derrière ! Mais pour cette partie-là, je ferai appel à vos lumières. Je vais d'abord lister tous les voltages / ampérages des cartes / contrôleurs que j'utilise pour savoir quelle(s) batterie(s) utiliser et comment brancher tout ça. . Ce sera juste un truc du genre : 1 batterie LiPo bien calibrée, un boutons On/Off ou du type "Urgence", et quelques cables pour brancher tout ça ... Enfin ça, c'est en théorie (comme je n'y connais pas grand chose dans ce domaine). Mais comme pas mal de choses dans ce projet, il va bien y avoir quelques complications pour pimenter la chose. Un premier problème que je vois déjà : tous mes contrôleurs sont en 12V et le Raspberry Pi en 5V. Mais sûrement pour faire simple dans un premier temps, j'alimenterai le Pi à part, avec un chargeur de téléphone (Power Bank). Mais avant de demander conseils, je vais récupérer les spécifications électriques de tout ce que je dois brancher et faire un post prochainement.
. Ce sera juste un truc du genre : 1 batterie LiPo bien calibrée, un boutons On/Off ou du type "Urgence", et quelques cables pour brancher tout ça ... Enfin ça, c'est en théorie (comme je n'y connais pas grand chose dans ce domaine). Mais comme pas mal de choses dans ce projet, il va bien y avoir quelques complications pour pimenter la chose. Un premier problème que je vois déjà : tous mes contrôleurs sont en 12V et le Raspberry Pi en 5V. Mais sûrement pour faire simple dans un premier temps, j'alimenterai le Pi à part, avec un chargeur de téléphone (Power Bank). Mais avant de demander conseils, je vais récupérer les spécifications électriques de tout ce que je dois brancher et faire un post prochainement.










![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)


