C'est vrai qu'on est loin de la boîte de Nesquick d'il y a 2 ans
Joli boulot! C'est vrai que ca a bien progressé . Je trouve quand meme que la construction en boites de Nesquik avait un certain charme .
Personnelement je bosse toujours en perspective et j'utilise les vues orthographiques pour déplacer mes pièces . Pour tous ce qui est pièces esthétiques les vues isométriques ca donne des proportions bizares .
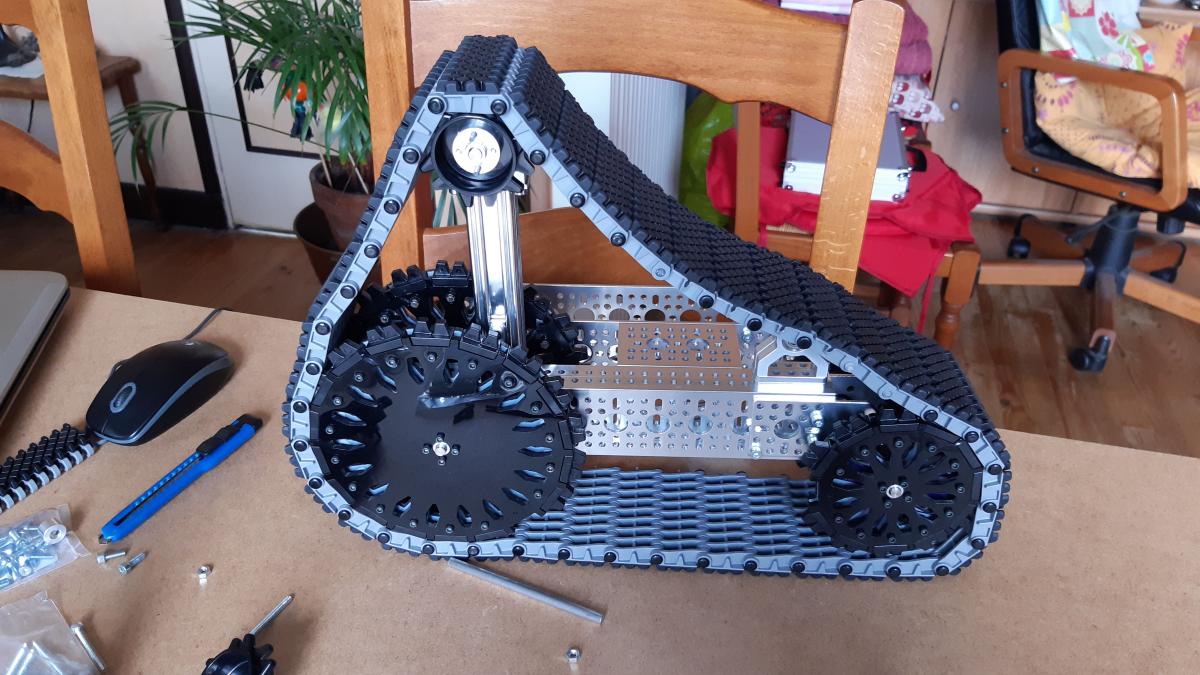
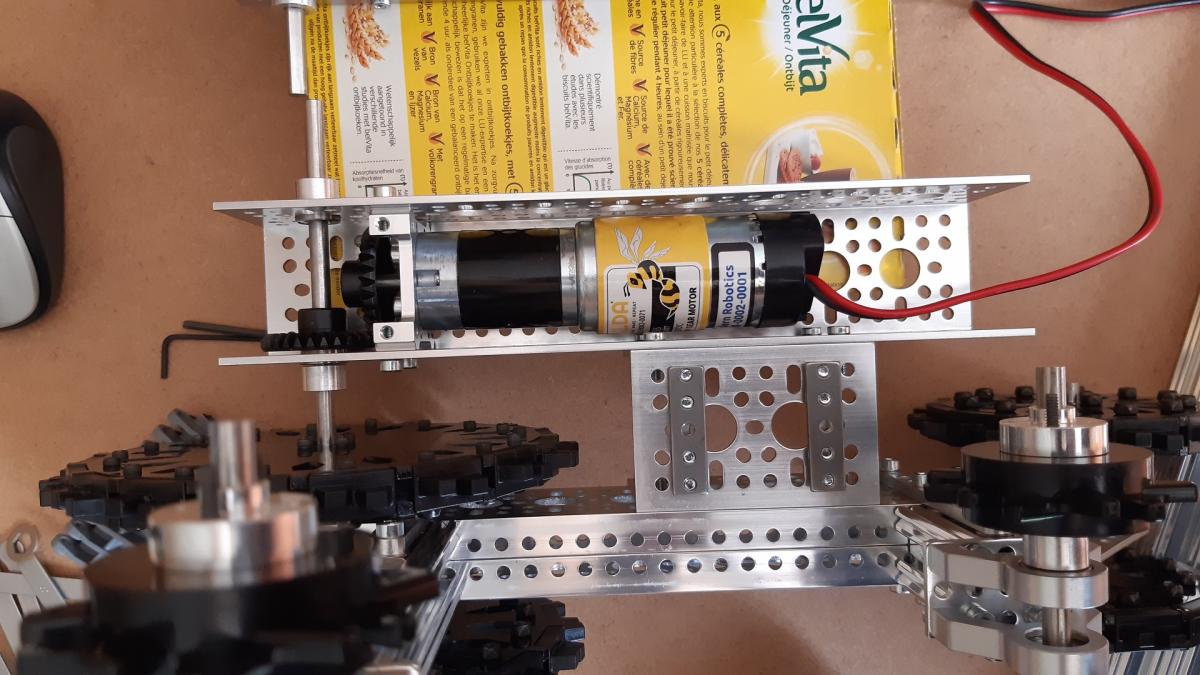
Voici le premier test du système. Assez concluant.
La traction est bonne vu le couple du moteur. Même si l'ensemble est assez lourd. Je ne l'ai pas encore pesé mais on doit être aux environs de 3 ou 4 Kgs.
Mais il y a quelques problèmes que je redoutais un peu depuis longtemps :
- les chenilles ont tendance à dérailler lorsque je tourne. Sûrement à cause des contraintes. Je ne sais pas si je dois tendre plus les chenilles. Mais j'ai l'intuition que cela risque d'amplifier le problème
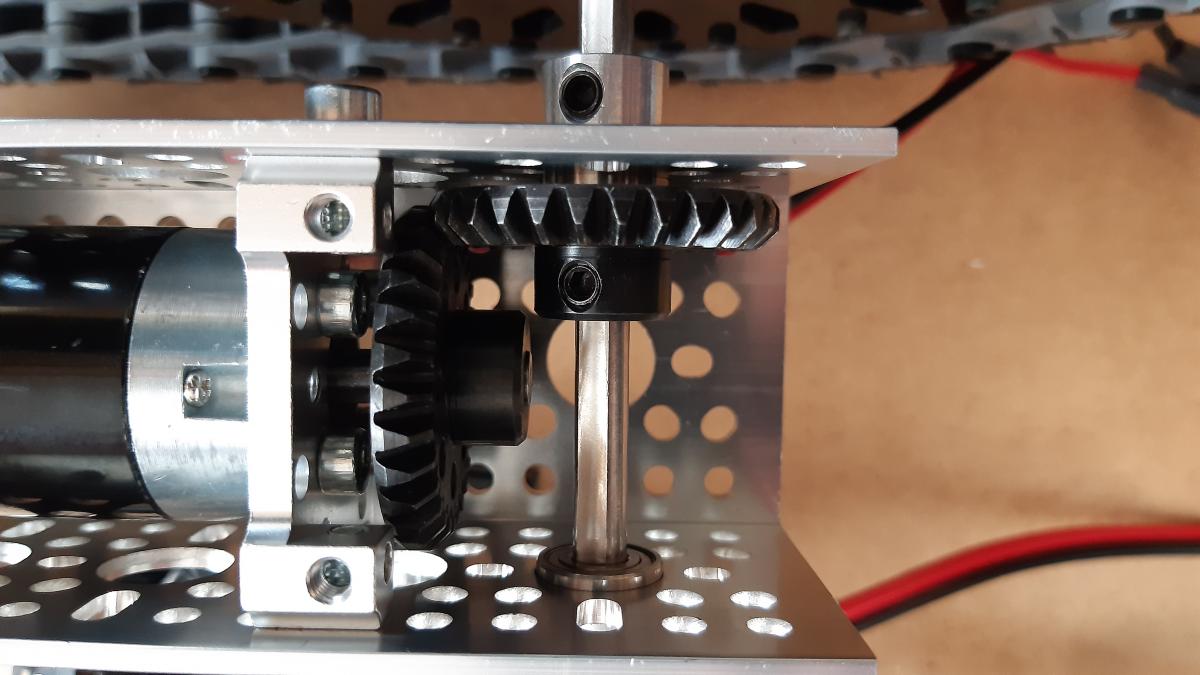
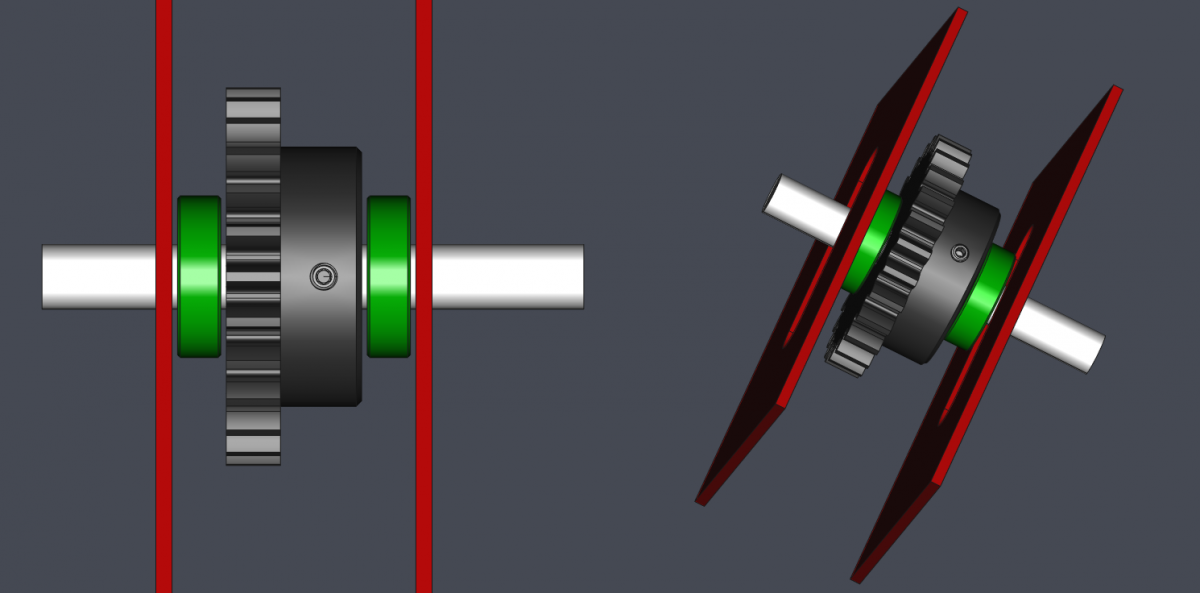
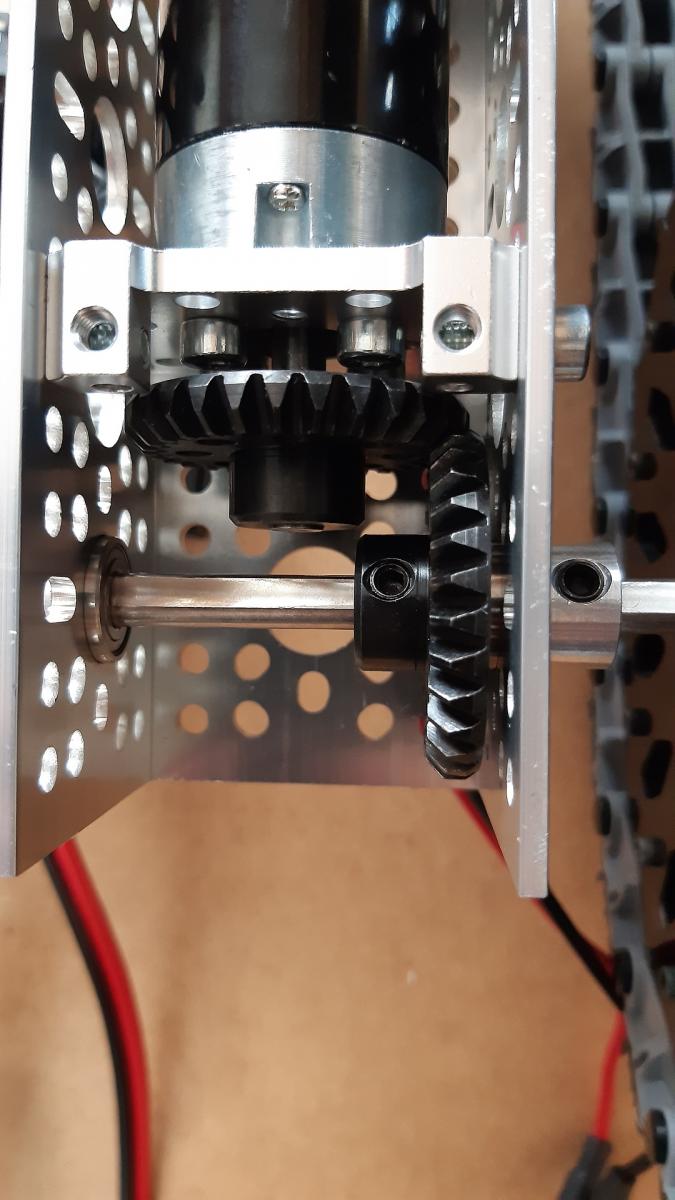
- les systèmes de serrage par vis des roues et des engrenages ont tendance à se dévisser, sûrement toujours à cause des contraintes et des vibrations (photos ci-dessous).
Si vous avez quelques idées pour solutionner tout ça, je suis preneur
Pour les engrenages, il y a un autre système de serrage, mais je vais être obligé de changer d'engrenage et de réduction (du 2:1 à la place du 1:1). Je ne pense pas que cela pose problème. Sur la vidéo, je ne suis qu'à 30% de la vitesse du moteur. J'ai donc encore de la marge et je ne compte pas rouler très vite non plus.
J'ai également quelques bugs au niveau du programme : pivotement gauche et droite inversée (je sais d'où ça vient) et, plus problématique : perte totale du contrôle alors que les moteurs tournent !!! Peut-être un mauvais enchaînement des événements ou une liaison perdue.
- les chenilles ont tendance à dérailler lorsque je tourne. Sûrement à cause des contraintes. Je ne sais pas si je dois tendre plus les chenilles. Mais j'ai l'intuition que cela risque d'amplifier le problème
Peut-être que monter la roue du milieu (sur le plan incliné) sur un bras à suspension pourrait régler le problème. Faut tester.
Quant aux vis de serrage, elles sont peut-être en pointe. Perso, je mettrais des vis normales avec un embout plat.
J'essaierai de les mettre en pratique avec la vis plate et l'entretoise en plastique. Cette plaque doit simplement être tenue par la vis ?
Pour le moteur à sortie radiale, j'y avais pensé au départ (c'est même ce que les "Wall-E Builders" utilisent). Mais étant contraint par la largeur de chenille que j'avais choisie (les Lynxmotion), je n'avais pas la place de les mettre entre les 2 roues pour chacun des côtés. Je suis donc parti sur les moteurs de la même marque que le système de structure du chassis (goBilda). Ainsi, je me suis pas embêté à devoir faire des ajustements dans tous les sens (soudure, adaptateurs, ...), n'étant toujours pas plus bricoleur qu'au début C'était seulement de l'assemblage à faire, et c'est, pour moi, bien assez compliqué comme ça.
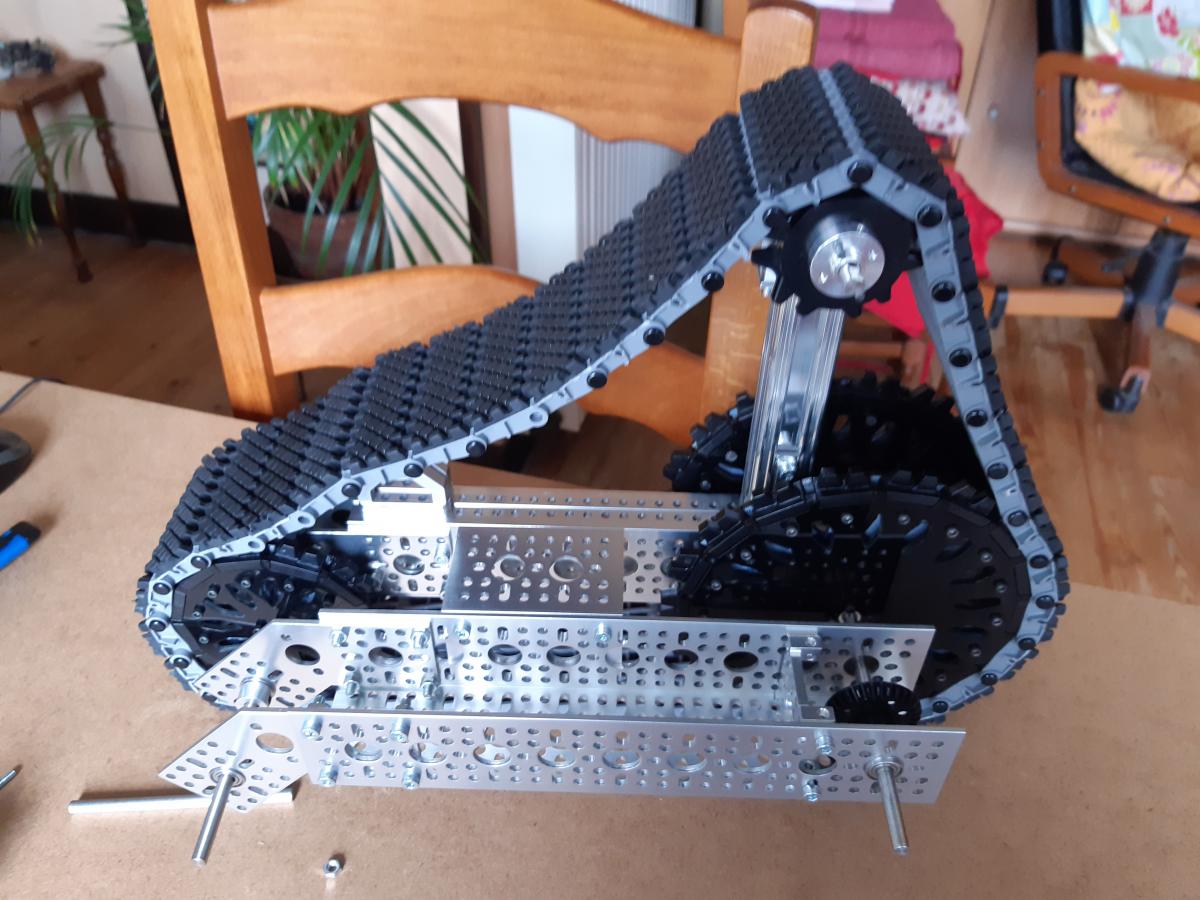
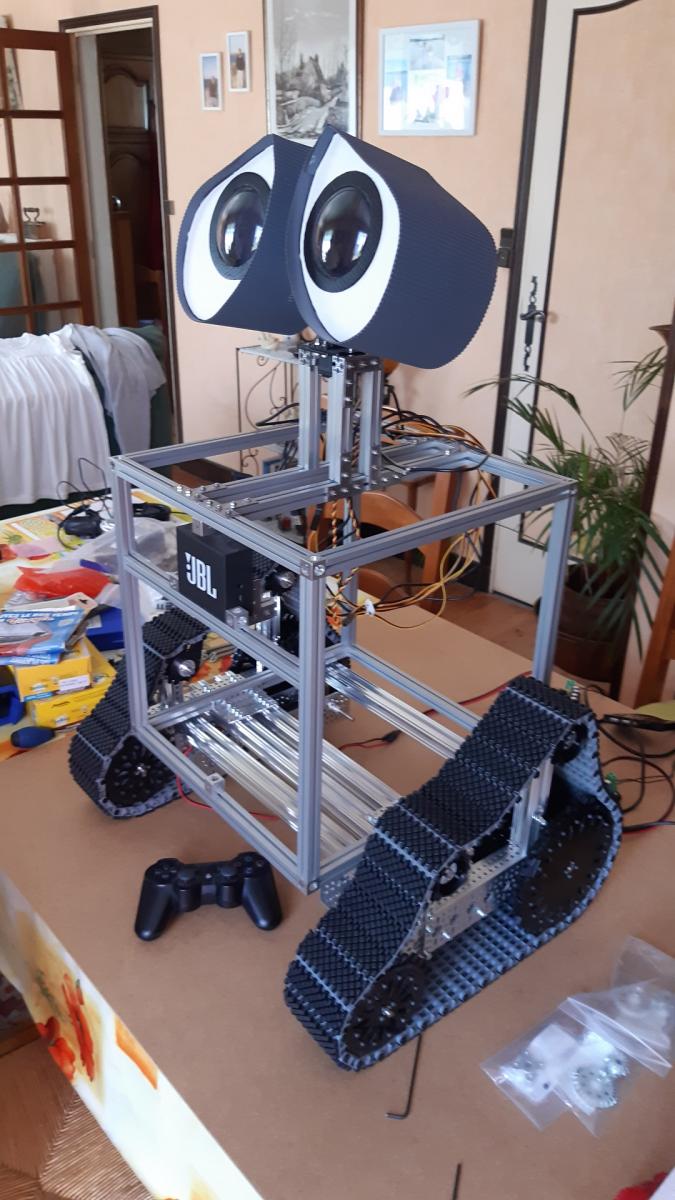
Pour la tension de la chenille, je vais essayer de concevoir un système de suspension pour une des roues du milieu (la plus basse), comme le suggère Oracid. En effet Forthman, cela atténuera sûrement le déraillement de la roue. Mais, je pense que le dévissage de la vis de serrage de la roue doit être aussi en cause. Je vais voir à mettre un système d'amortisseurs avec des ressorts. Un nouveau challenge !!! Au début, ce devait être un bras libre reliant les 2 petites roues (comme on voit dans l'une de mes vidéos précédentes), mais je n'ai pas réussi à concevoir ce système avec les pièces que j'avais à ma disposition.
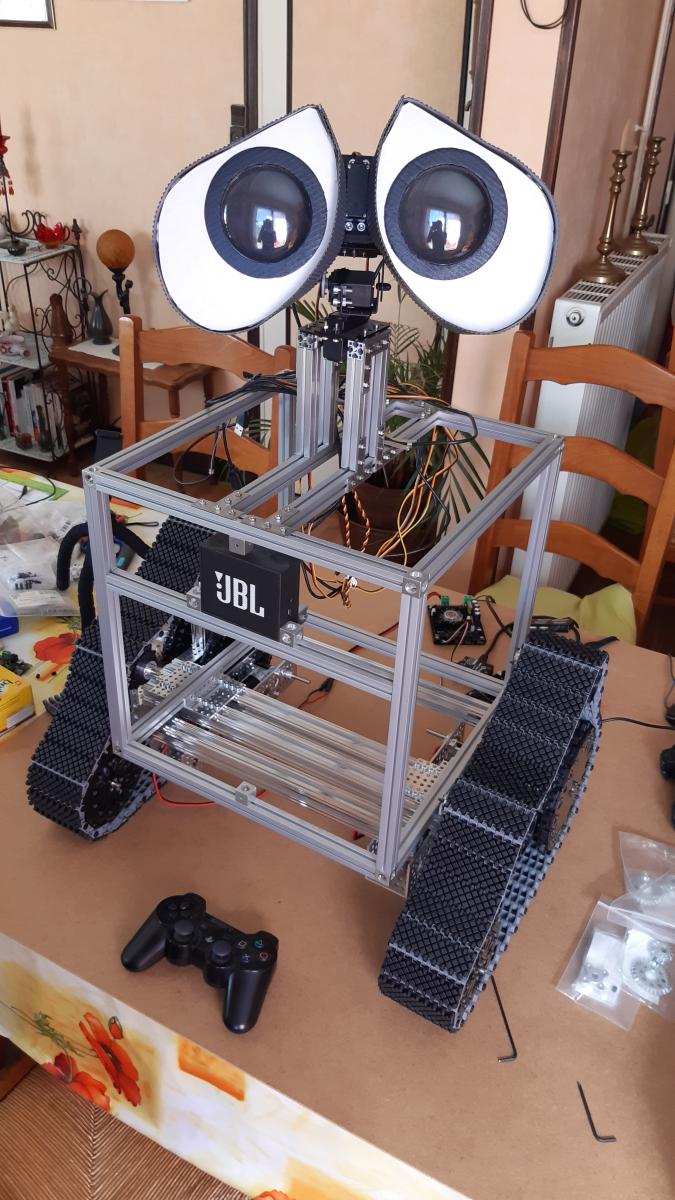
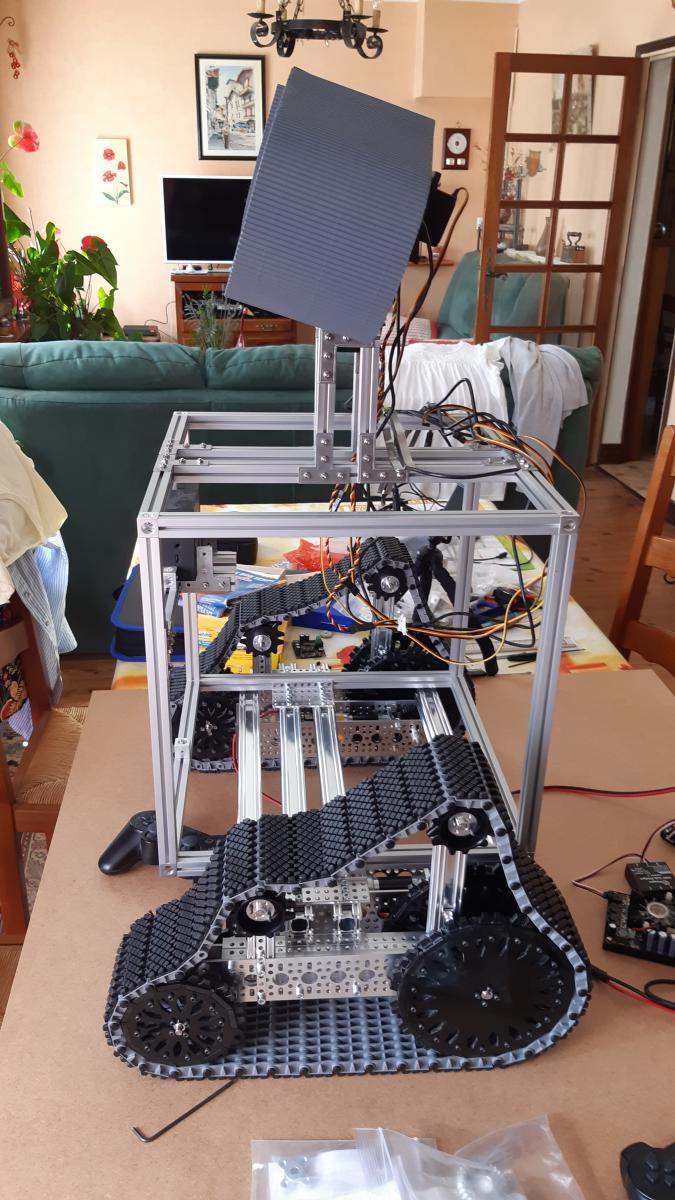
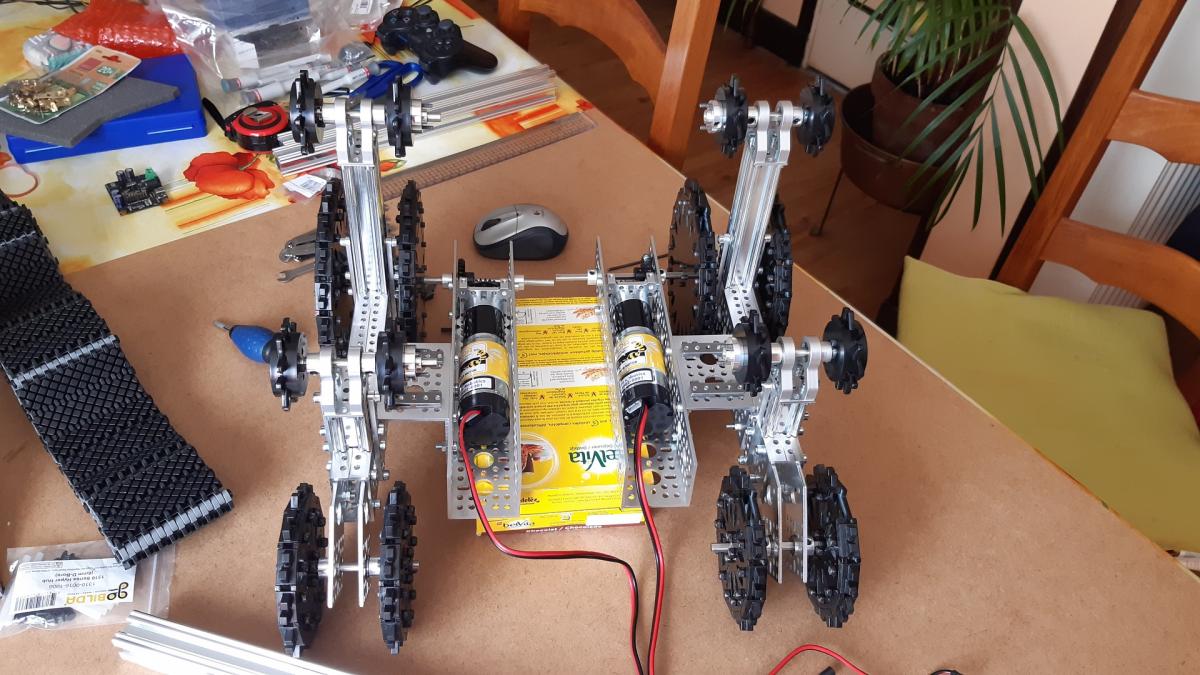
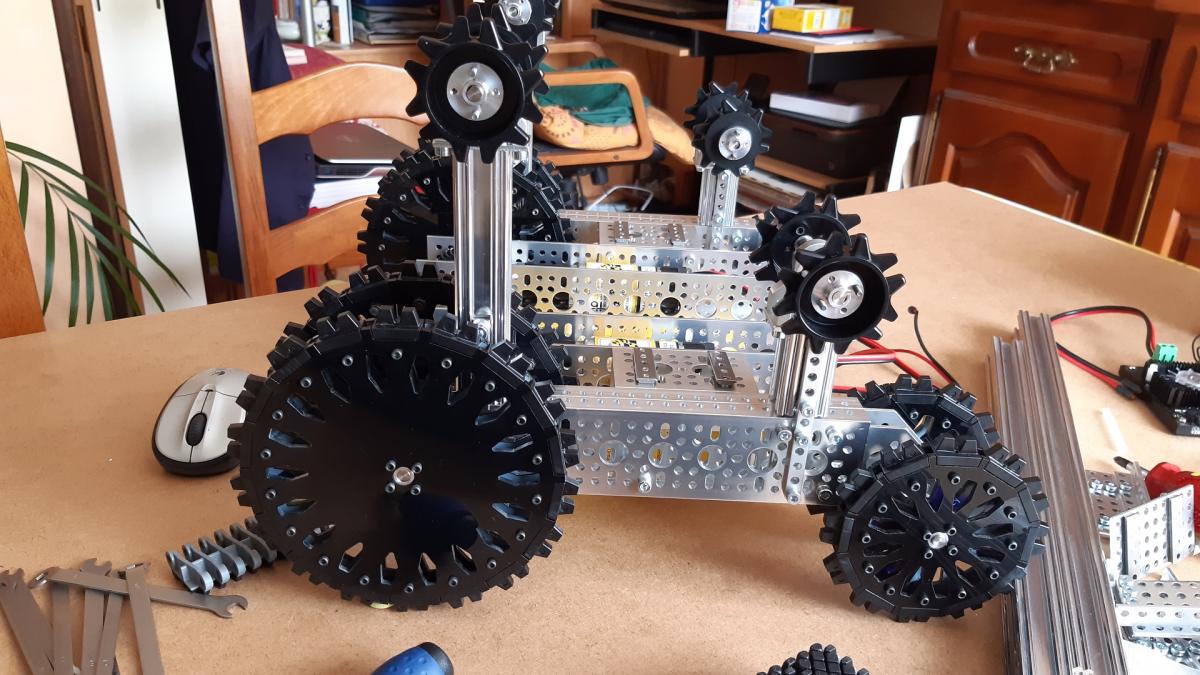
En attendant, quelques photos du chassis avec le corps :
Quand tu tournes sur place, les 2 chenilles doivent tourner simultanément en sens inverse. Si seulement une seule chenille tourne, alors oui, les frottements sur l'autre chenille sont très importants.
Pour faire un test, un tendeur, avec un rappel avec un élastique devrait déjà te donner une idée de l'efficacité du mécanisme.
C'est ce que je fais pour séparer les barbotins, les pignons et bras de mon robot à chenilles et le PEHD s'usine bien (mais il faut faire attention, ça peut faire mal ).
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
Une petite vidéo racontant l'histoire "romancée" de la conception du système de chenilles. Pour être honnête, j'ai mis largement plus de temps à faire la vidéo (capture, montage, ...) que concevoir et monter le châssis








 .
.


 Peut-être un mauvais enchaînement des événements ou une liaison perdue.
Peut-être un mauvais enchaînement des événements ou une liaison perdue.
 )
)














![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)



