
Bravo ! Félicitations ! Excellent boulot !
Pour les vibrations, je pense qu'elles sont dues aux contraintes du poids de la tête.
Je t'invite à regarder cette vidéo à partir de 5'00" si tu n'as pas la patience. https://www.robot-ma...ompatible-lego/
Comme tu peux le constater, cette structure en parallépipède pourrait largement supporter une tête.
C'est la structure qui doit maintenir la tête. L'axe du servo n'est là que pour appliquer un mouvement, mais il ne doit pas faire parti mécaniquement de la structure en elle-même.
Mais, bien entendu, il ne faut pas s'interdire d'utiliser le corps du servo comme partie intégrante de la structure, comme c'est souvent le cas dans les mécanismes à étriers, comme sur ton servo du haut, mais dans ce cas aucune force ne doit s'appliquer perpendiculaire à l'axe du servo.
Je ne sais pas si je suis clair.

130 réponses à ce sujet
#41

Oracid
-

- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
#42
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 février 2019 - 04:16
Voici 2 exemples de fixations de tête de robot avec étriers activé par servos.
Il y a en surement beaucoup d'autres.
Comme tu peux le constater, le problème n'est pas nouveau.
Il y a en surement beaucoup d'autres.
Comme tu peux le constater, le problème n'est pas nouveau.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#43
Hologram
-
- Membres
- 64 messages
Membre
Posté 14 février 2019 - 12:05
Merci Oracid pour toutes ces idées. Tous ces systèmes sont vraiment très intéressants et ça me donne envie de tous les essayer. Les possibilités avec les Légos sont infinies.
Le problème, c'est que j'ai encore beaucoup de mal à penser en mouvements indirects et je vais souvent au plus simple. J'ai tendance à positionner directement les axes des moteurs sur les pièces que je veux faire bouger, ce qui en terme de contraintes mécaniques peut s'avérer très mauvais.
Par contre, il y a aussi le problème de place. En effet, la plupart de ces systèmes obligent à déporter les moteurs et à repenser le placement des différentes pièces, ce qui fait que, dans le cas de mon robot, le cou serait beaucoup plus large, et par conséquent moins esthétique.
Ce système est pas mal non plus :
Je vais cogiter tout ça 
Blog : http://www.roboteek.fr/
#44
Microrupteurman
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 17 février 2019 - 08:14
Bon boulot, est ça risque pas de s'envoler 😉😉
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#45
Hologram
-
- Membres
- 64 messages
Membre
Posté 01 juin 2019 - 06:08
Salut à tous,
Un nouveau post pour de nouvelles fonctionnalités. Cela fait déjà quelques semaines qu'elles sont en place mais je n'ai fait la vidéo de présentation que ce week-end.
Tout d'abord, en plus d'être contrôlable par l'intermédiaire d'une application Web (depuis déjà quelques années), Wall-E est maintenant pilotable à distance en Bluetooth grâce à une manette PS3. Pour cela, j'ai développé une surcouche à une librairie JAVA existante. Ainsi, je peux contrôler les mouvements du cou et des yeux (pour l'instant), régler la vitesse de ces mouvements en utilisant les joysticks analogiques, lui faire dire "Bonjour" (il reste poli  ). Un peu plus de détails sur ce développement sur mon blog. Bien sûr, voici la petite vidéo de présentation qui va avec :
). Un peu plus de détails sur ce développement sur mon blog. Bien sûr, voici la petite vidéo de présentation qui va avec :
Sinon, voici les 2 autres nouveautés :
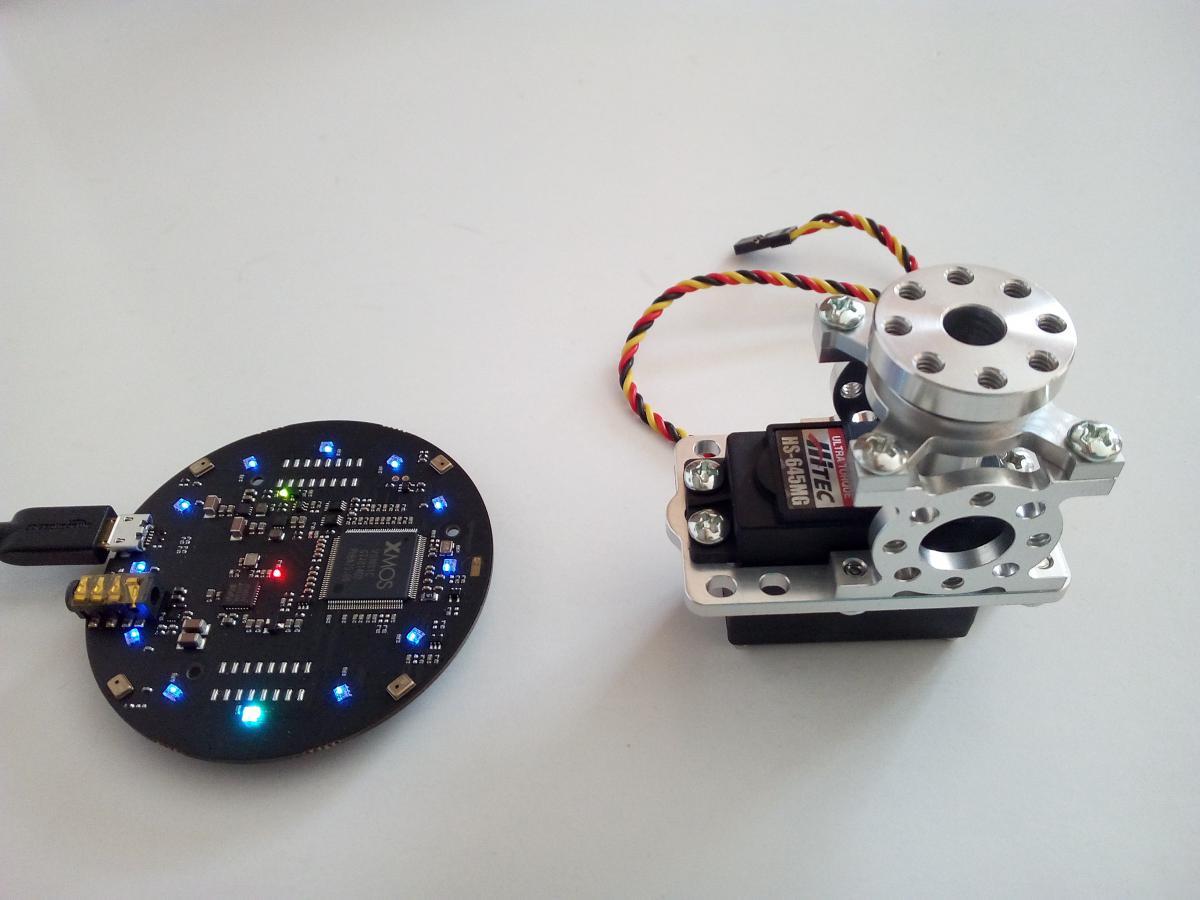
- à gauche, une carte Respeaker qui est un microphone evolué (qui contient en fait 4 micro) et qui permet notamment de localiser d'où provient le son. Pour ce périphérique, j'ai également développé une librairie en JAVA pour accéder aux différentes infos que fournit ce périphérique au travers de l'USB. Pour ceux que ça intéresse, le code source est disponible sur GitHub.
- à droite, un support pour servo-moteur afin d'essayer de stabiliser le cou qui tremble beaucoup selon les mouvements (cf posts précédents). Malheureusement, les trous pour les vis ne sont pas compatibles entre eux (Actobotics vs Lynxmotion)  Il va sûrement falloir que je perce !!!
Il va sûrement falloir que je perce !!! 
Blog : http://www.roboteek.fr/
#46
Hologram
-
- Membres
- 64 messages
Membre
Posté 01 juin 2019 - 06:09
Salut à tous,
Un nouveau post pour de nouvelles fonctionnalités. Cela fait déjà quelques semaines qu'elles sont en place mais je n'ai fait la vidéo de présentation que ce week-end.
Tout d'abord, en plus d'être contrôlable par l'intermédiaire d'une application Web (depuis déjà quelques années), Wall-E est maintenant pilotable à distance en Bluetooth grâce à une manette PS3. Pour cela, j'ai développé une surcouche à une librairie JAVA existante. Ainsi, je peux contrôler les mouvements du cou et des yeux (pour l'instant), régler la vitesse de ces mouvements en utilisant les joysticks analogiques, lui faire dire "Bonjour" (il reste poli ). Un peu plus de détails sur ce développement sur mon blog. Bien sûr, voici la petite vidéo de présentation qui va avec :
Sinon, voici les 2 autres nouveautés :
- à gauche, une carte ReSpeaker qui est un microphone evolué (qui contient en fait 4 micro) et qui permet notamment de localiser d'où provient le son. Pour ce périphérique, j'ai également développé une librairie en JAVA pour accéder aux différentes infos que fournit ce périphérique au travers de l'USB. Pour ceux que ça intéresse, le code source est disponible sur GitHub.
- à droite, un support pour servo-moteur afin d'essayer de stabiliser le cou qui tremble beaucoup selon les mouvements (cf posts précédents). Malheureusement, les trous pour les vis ne sont pas compatibles entre eux (Actobotics vs Lynxmotion) Il va sûrement falloir que je perce !!!
Blog : http://www.roboteek.fr/
#47
Mike118
-

- Administrateur
-
- 10â¯339 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 04 juin 2019 - 09:42
Super, continu comme ça
Et bon courage pour l'adaptation!
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#48
Hologram
-
- Membres
- 64 messages
Membre
Posté 21 septembre 2019 - 05:42
Salut,
Je reviens vers vous pour vous demander quelques conseils. Après l'été pendant lequel je n'ai pas vraiment avancé sur mon projet, voici la rentrée avec son lot de bonnes résolutions. Le défi pour ces prochains mois, c'est d'ajouter le système de chenilles au robot pour qu'il puisse se déplacer. Eh oui, Wall-e n'a pas de simples roues (ça aurait été trop facile). Il faudrait que ça ressemble plus ou moins à ça :

J'ai trouvé différents systèmes en vente :
- les systèmes modulaires où la chenille est composées de plusieurs tranches :
- http://www.lynxmotion.com/c-94-modular-track-system.aspx
- https://www.pitsco.c...-Tank-Tread-Kit
- Avantage : on peut construire facilement la longueur de chenille souhaitée
- Inconvénient : je ne sais pas si c'est très robuste même s'ils annoncent pour le LynxMotion que ça peut porter au-delà de 40kg
- les systèmes de chenilles en caoutchouc d'un seul tenant :
- https://www.superdro...-and-tracks/55/
- Avantages : semble plus solide, doit pouvoir rouler sur différents types de terrain
- Inconvénients : longueur fixe, cher
Sachant que le corps du robot sans la tête est un cube de 40cm de côté et que le poids doit être environ 2/3 kg pour l'instant. Je ne pense pas qu'il excèdera 5kg au final. Pour le mouvement, ça sera de la conduite différentielle, qui doit être adaptée aux chenilles avec des problèmes de frottements en plus (dites-moi si je me trompe), et j'utiliserai toujours la même manette PS3 qui me sert déjà pour les autres mouvements en m'inspirant de ce site https://www.impulsea...l-steering.html.
Donc, si vous vous avez des conseils / avis à me donner sur les chenilles, je suis preneur.
Et je n'ai pas encore réfléchi aux moteurs pour actionner tout ça :-) => pareil, des conseils ?
Merci
Blog : http://www.roboteek.fr/
#49
Mike118
-
- Administrateur
-
- 10â¯339 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 21 septembre 2019 - 05:58
Si tu as accès à une imprimante 3D et du temps tu peux éventuellement imprimer tes chenilles en 3D =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#50
Hologram
-
- Membres
- 64 messages
Membre
Posté 19 octobre 2019 - 05:58
L'imprimante 3D, j'y pense sérieusement. Mais, c'est plus par manque de place que je n'en prends pas. Squattant chez mes parents, ce n'est pas simple !!! Déjà que mon robot trône fièrement sur la table du salon !!!  Je reviendrai vous demander des conseils une fois que je me serai décidé. Et j'ai peur d'acheter une imprimante qui risque de me servir qu'une ou deux fois.
Je reviendrai vous demander des conseils une fois que je me serai décidé. Et j'ai peur d'acheter une imprimante qui risque de me servir qu'une ou deux fois.
En attendant , et avant d'envisager de m'attaquer aux chenilles, se pose le problème du choix des moteurs pour faire bouger tout ça. Et là, ce n'est pas simple.
J'ai utilisé l'outil en ligne de Robotshop et la feuille Excel que j'ai trouvée sur Robot-Maker dans un récent fil de discussion. Et là, les résultats ne sont pas tout à fait les mêmes.
Voici mes spécifications :
- Nombre de moteurs : 2
- Diamètre des roues : 18cm
- Poids : je table sur 10 Kg (avec les moteurs, batteries, ...)
- Pente : 20° (soyons fous, même si je pense qu'il ne roulera que sur du plat, si un jour il roule)
- Vitesse : 1m/s (pareil, je pense que c'est un peu trop, mais bon, ...)
Résultats Robotshop :
- RPM : 106
- Couple : 25,09 kg.cm
Résultats Excel :
- RPM : 106 (là, on est bon)
- Couple : 15,38 kg.cm (là, on est moins bon
 )
)
Déjà, quelques questions:
- Le RPM, c'est à vide ou chargé ? Car, je suppose que plus on charge, plus la vitesse va diminuer. Si je veux atteindre une certaine vitesse pour déplacer les 10kg, faut-il prévoir un RPM supérieur ?
- Pour le couple, j'étais donc parti pour choisir des moteurs de 30kg.cm. Mais après avoir expliqué mon cas sur Robotshop, le gars m'a conseillé de prendre des moteurs de l'ordre de 50kg.cm car il faut prendre en compte une réduction par 4. Il m'a dit que le couple annoncé correspond au "stall torque", et que le "dynamic torque" (c'est à dire le couple nécessaire pour déplacer le poids demandé si j'ai bien compris), correspond à environ 1/4 de la valeur du "stall torque". Donc, si je souhaite déplacer 10kg, il faut que je prenne un moteur dont le "stall torque" est 4 * 10 kg --> 40kg.cm. Donc je ne sais plus trop quoi en penser.
Je pense partir sur ce genre de moteurs qui, à mon avis, font plus que l'affaire :
ou
Auriez-vous des conseils pour que je choisisse les bons ?
Pour le diamètre des roues avec un système à chenilles, dois-je prendre que le diamètre des roues motrices (roues arrières), ou l'ensemble de la longueur de la chenille ? Mon intuition me dirait juste la roue motrice, mais maintenant, je ne suis plus sûr de rien.
Blog : http://www.roboteek.fr/
#51
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 19 octobre 2019 - 08:12
Tu parles de 10kg, mais l'as-tu pesé ?
Tes moteurs sont assez lourds, mais le plus gros fait moins de 500g, disons 1kg pour les 2 moteurs.
Même si tu prends une grosse batterie à 1kg, il reste tout de même 8kg pour le reste.
La roue motrice (centrale sur Wall-E) sur un char, cela s'appelle un barbotin. C'est effectivement lui qui va donner la vitesse et le couple.
Les autres roues vont déterminer la capacité à passer les obstacles. Mais Wall-E n'est pas fait pour passer des obstacles, car il n'est pas assez long.
Pour gravir des pentes, c'est le caoutchouc des chenilles qui permettra de les gravir. Quelque soit le poids du robot.
Mais attention, Wall-E est très haut, ce qui n'est pas pour arranger les choses.
Tes moteurs sont assez lourds, mais le plus gros fait moins de 500g, disons 1kg pour les 2 moteurs.
Même si tu prends une grosse batterie à 1kg, il reste tout de même 8kg pour le reste.
La roue motrice (centrale sur Wall-E) sur un char, cela s'appelle un barbotin. C'est effectivement lui qui va donner la vitesse et le couple.
Les autres roues vont déterminer la capacité à passer les obstacles. Mais Wall-E n'est pas fait pour passer des obstacles, car il n'est pas assez long.
Pour gravir des pentes, c'est le caoutchouc des chenilles qui permettra de les gravir. Quelque soit le poids du robot.
Mais attention, Wall-E est très haut, ce qui n'est pas pour arranger les choses.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#52
Sandro
-

- Modérateur
-
- 1â¯346 messages
Membre chevronné
- Gender:Male
Posté 19 octobre 2019 - 09:25
Pour la différence, il y a deux éléments :
- le calcul de robotshop prend en compte un paramètre de rendement (efficiency), qui par défaut est à 65%. Mon calcul suppose un rendement unitaire.
- le calcul de robotshop comprends un critère "accélération", qui par défaut est à 0.2 m/s² : ils considèrent donc qu'on garde en réserve assez de couple pour accélérer à 0.2m/s² quand on est sur la pente max à la vitesse nominale. De mon coté, je considère que si on est en pente max à la vitesse nominale, alors il n'y a pas lieu d'accélérer (si on est un peu plus lent, alors il restera un petit peu de couple disponible).
Si tu mets le rendement à 100% et l'accélération à 0, alors le résultat de robotshop est exactement le même que le mien.
A noter, que dans mon cas (donc aussi robotshop), il faut prendre les caractéristiques en charge.
Donc que faire en pratique :
1) caractéristiques en charge vs extrêmes (no load speed et stall torque) : j'ai pour habitude de faire tous mes calculs avec les caractéristiques en charge, ce qui laisse un peu de marge en pratique (tu arrivera à franchir une pente un peu plus raide mais plus doucement, et tu arrivera à rouler un peu plus vite sur du plat). Cette marge compense un peu les frottements qui ne sont pas pris en compte
2) efficacité : sur un robot à roues avec toutes les roues motorisées et montées directement sur la sortie des motoréducteurs, je pense que les pertes sont pas trop importantes, donc en arrondissant vers le haut + utilisation des caractéristiques en charge, je pense que je suis assez réaliste (j'ai jamais mesuré). Sur ton robot, tu as de la mécanique "externe" sur le moteur, donc il faut prévoir plus de pertes en frottement : si tu veux tenir tes caractéristiques, il faut que tu prenne un peu de marge pour compenser
3) il y a un troisième critère à prendre en compte selon les applications : la capacité du robot à accélérer pour atteindre sa vitesse nominale. Sur un robot lent avec beaucoup de couple, ça n'importe pas trop, mais sur un robot qui doit être très réactif (robot de course sur un terrain complexe, compétitions de robot où tu t'arrête souvent, ...), ça peut être important (tu n'as pas envie que le robot mette 10s pour atteindre sa vitesse nominale. Si ce critère te semble important pour ton robot, et que tu as besoin d'aide, c'est volontiers si tu me le dis d'ici demain (dimanche) pas trop tard. Pour le calcul, j'utilise généralement le couple en charge, même si en réalité au tout début c'est le stall torque, puis la valeur se raproche du couple "en charge" à mesure que tu approche la vitesse nominale (mais tu as aussi des frottements)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#53
Hologram
-
- Membres
- 64 messages
Membre
Posté 20 octobre 2019 - 06:06
@Oracid et @Sandro
Merci à vous pour tous ces conseils.
Tu parles de 10kg, mais l'as-tu pesé ?
Pour l'instant, je ne l'ai pas pesé. Mais je ne dois pas être loin des 2kg dans son état actuel. C'est à dire la tête et le corps (cube en aluminium). Il y aura en plus toute l'électronique, peut-être un ordinateur (si je n'arrive pas à faire tourner mes programmes de vision artificielle sur un Raspberry), les chenilles + les roues, les moteurs, la batterie, et le reste du corps (pour fermer le cube). Donc, c'est vrai qu'avec 10Kg, j'ai sûrement prévu large (voire très large  ), mais je pense que j'atteindrai facilement les 5 - 6kg.
), mais je pense que j'atteindrai facilement les 5 - 6kg.
La roue motrice (centrale sur Wall-E) sur un char, cela s'appelle un barbotin.
Pour la roue motrice, j'étais plutôt parti sur la roue arrière (la plus grande) comme on peut voir sur cette vidéo. Après, peut-être que je me trompe et que je devrais partir sur l'une des autres roues. Un avis là-dessus ? Mais je ne compte pas lui faire passer des obstacles. Je vais rester sur du plat (dans une maison, ou genre terrasse).
https://www.youtube....h?v=ObaTgpRxBgk
@Sandro
Merci pour toutes ces infos. Effectivement, pour les différences de calculs, je me doutais bien que certains paramètres devaient jouer. Pour l'efficacité, je vais forcément perdre, notamment avec le frottement des chenilles et selon si les moteurs sont directement fixés aux roues ou pas (j'ai un peu de mal à voir sur ce point). Pour l'accélération, je ne cherche pas à ce qu'il soit si réactif que ça afin d'éviter les à-coups (j'ai déjà eu de mauvaises surprise avec la tête). De toutes façons, il ne sera pas non plus très rapide. Je veux par contre qu'il réagisse aux contrôles par la manette, notamment les changements de direction qui doivent peut-être demander un certain couple. Je ferai sûrement appel à tes lumières un de ces jours quand j'aurais avancer dans ma réflexion.
A bientôt
Blog : http://www.roboteek.fr/
#54
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 20 octobre 2019 - 08:16
Ah oui, ce n'est pas une traction centrale. Wall-E a une structure de Bulldozer.Pour la roue motrice, j'étais plutôt parti sur la roue arrière (la plus grande) comme on peut voir sur cette vidéo. Après, peut-être que je me trompe et que je devrais partir sur l'une des autres roues. Un avis là-dessus ?
Comme on peut le voir sur ta vidéo, la motorisation par l'arrière permet de mettre le tendeur de chaine vers le haut. Pas bête !
Sinon, il aurait fallu un tendeur vers l'avant.
Je ne suis pas sûr qu'il y ait un réel avantage à la motorisation au centre. je pense que c'est juste une question d'encombrement.
Sur un char d'assaut, le moteur est à l'arrière et les munitions doivent occuper beaucoup de place, au plus proche du canon.
De plus, il y a un impératif, les proues doivent être relevées.
Sur un engin de chantier, la position centrale du barbotin est peut-être dû à la position centrale du moteur.
Un Wall-E est fait pour rouler sur du plat, et pas trop pentu.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#55
Hologram
-
- Membres
- 64 messages
Membre
Posté 27 octobre 2019 - 12:06
Bon, je n'ai plus qu'à aller me rhabiller !!!
Blog : http://www.roboteek.fr/
#56
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 octobre 2019 - 02:22
Pourquoi ?Bon, je n'ai plus qu'à aller me rhabiller !!!
C'est un jouet qui a été motorisé et amélioré. https://www.amazon.fr/Disney-0064442602178-Wall-E-Figurine-rouillé/dp/B0018MDAEM/ref=sr_1_14?hvadid=80470539431064&hvbmt=be&hvdev=c&hvqmt=e&keywords=wall+e&qid=1572182098&sr=8-14
Ton projet est autrement plus grand. Je ne connais pas la taille du vrai Wall-E.
La réalisation de cette vidéo est excellente, c'est vrai, mais rien ne t'interdit d'en faire autant, voir mieux.
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#58
Hologram
-
- Membres
- 64 messages
Membre
Posté 27 octobre 2019 - 05:40
Pourquoi ?
C'est un jouet qui a été motorisé et amélioré. https://www.amazon.fr/Disney-0064442602178-Wall-E-Figurine-rouillé/dp/B0018MDAEM/ref=sr_1_14?hvadid=80470539431064&hvbmt=be&hvdev=c&hvqmt=e&keywords=wall+e&qid=1572182098&sr=8-14
Ton projet est autrement plus grand. Je ne connais pas la taille du vrai Wall-E.
La réalisation de cette vidéo est excellente, c'est vrai, mais rien ne t'interdit d'en faire autant, voir mieux.
C'est vrai qu'au départ, j'ai cru que c'était le jouet "bidouillé" comme on peut le voir souvent. Mais là, le mec l'a entièrement modélisé et imprimé en 3D. Et il parait quand même plus grand que le jouet, mais pas aussi grand que le mien. Au fait, hier, j'ai pesé mon robot tel qu'il est actuellement (tête + la structure cubique en aluminium + un peu d'électronique), et j'en suis déjà à 3 kg (plus que je ne pensais).
Voici une petite idée de la taille réelle de Wall-E :

pour faire "mieux" il suffit d'y coller une intelligence artificielle, et de faire un vrai compacteur
Il a plus ou moins fait pareil que moi : contrôle et visualisation de la webcam à partir d'une appli web. Après, je compte bien rajouter un peu d'intelligence artificielle même s'il y en a déjà un peu comme la reconnaissance vocale, la détection de visage, un peu de conversation, ... Et pour le compacteur, est-ce réellement possible de le faire dans un si petit espace avec toute l'électronique ???  Mais je verrai tout ça une fois que je me serai dépêtré du choix des moteurs et tout ce qui va avec (contrôleur, mécanique, roues, ...).
Mais je verrai tout ça une fois que je me serai dépêtré du choix des moteurs et tout ce qui va avec (contrôleur, mécanique, roues, ...).
Pour ceux que ça intéresse, le site du gars qui a fait le Wall-E de la vidéo précédente avec les fichiers 3D pour le refaire et la vidéo de montage : https://wired.chilli...printed-wall-e/
- Oracid aime ceci
Blog : http://www.roboteek.fr/
#59
Forthman
-

- Membres
-
- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 27 octobre 2019 - 06:20
Non mais mon commentaire était humoristique hein ;-)
Le but n'est pas de faire "mieux", le but c'est de te faire plaisir. et si demain ton wall-e ne te motive plus, change de projet.
Le temps passé à se faire plaisir et à apprendre n'est jamais du temps perdu
- Oliver17 aime ceci
#60
Mike118
-
- Administrateur
-
- 10â¯339 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 octobre 2019 - 07:38
Si tu veux rendre ton robot fun, tu peux faire en sorte qu'il soit piloté par Internet via vigibot par exemple =).
Mais comme le dit Forthman le plus important c'est que tu te fasses plaisir =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : walle, intelligence artificielle, robot, autonome
![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)

2 utilisateur(s) li(sen)t ce sujet
0 members, 2 guests, 0 anonymous users

