

Non mais mon commentaire était humoristique hein ;-)
Le but n'est pas de faire "mieux", le but c'est de te faire plaisir. et si demain ton wall-e ne te motive plus, change de projet.
Le temps passé à se faire plaisir et à apprendre n'est jamais du temps perdu

J'avais bien compris que c'était ironique  Et il n'aura jamais une fonctionnalité de compacteur !!!
Et il n'aura jamais une fonctionnalité de compacteur !!!
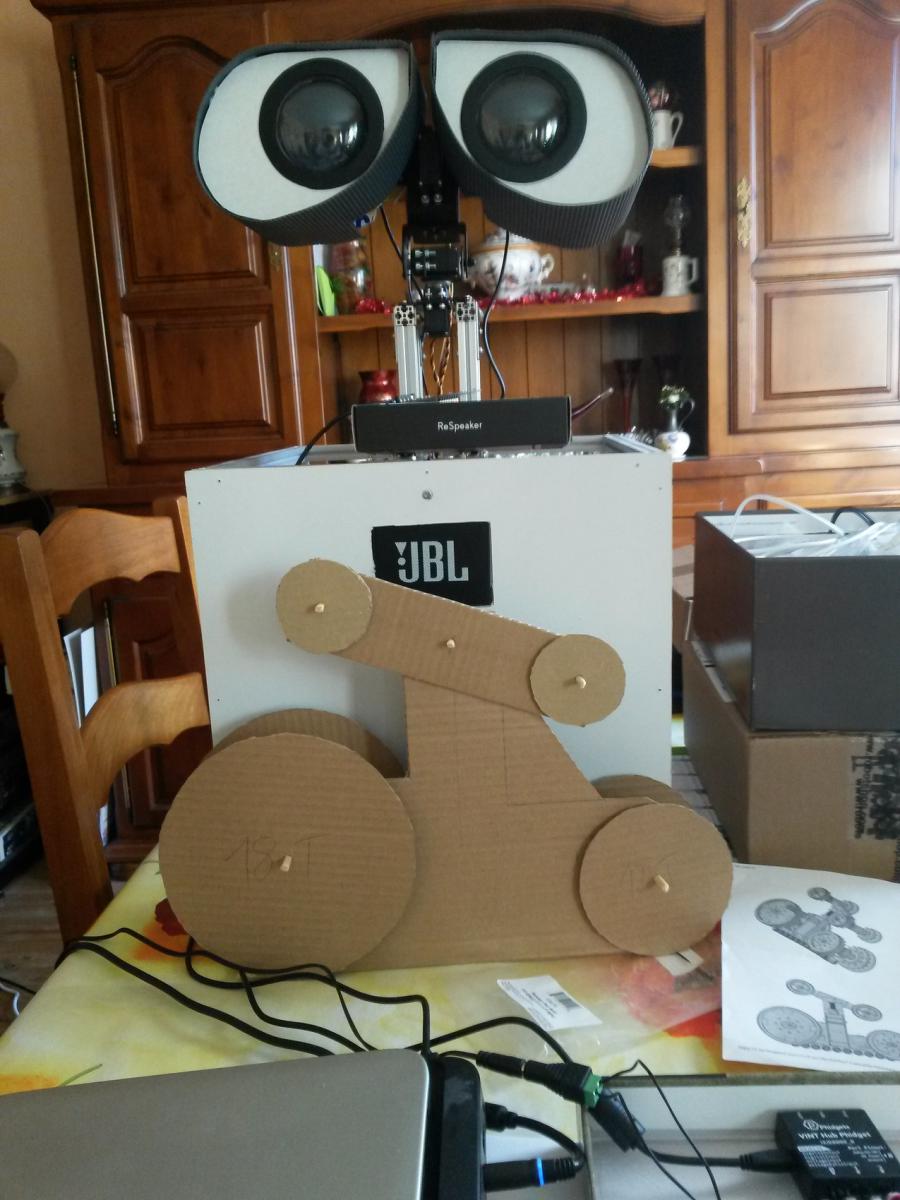
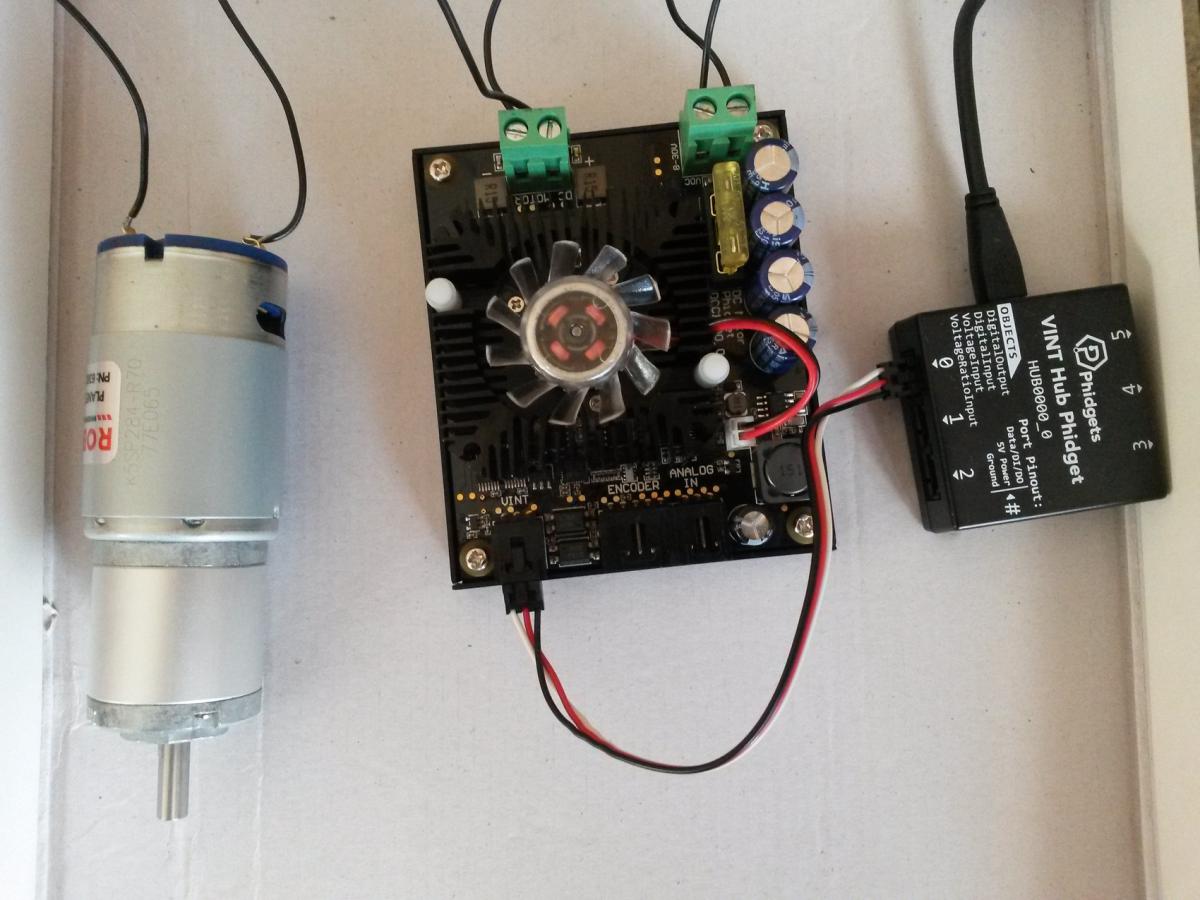
La conception de ce robot me motive. Mais comme il y a certains domaines où je n'y connais rien, ou pas grand chose, comme l'électronique ou certains mécanisme, je peux vite me prendre la tête pour faire les bons choix. Actuellement, c'est le choix des moteurs et leurs branchements  . Mais comme tu le dis, on n'est là pour apprendre. Et j'en serai d'autant plus fier si j'arrive à aller au bout de la réalisation de ce robot. En plus, un robot sans roues, ....
. Mais comme tu le dis, on n'est là pour apprendre. Et j'en serai d'autant plus fier si j'arrive à aller au bout de la réalisation de ce robot. En plus, un robot sans roues, ....
Si tu veux rendre ton robot fun, tu peux faire en sorte qu'il soit piloté par Internet via vigibot par exemple =).
Mais comme le dit Forthman le plus important c'est que tu te fasses plaisir =)
Il faudra que je vois comment fonctionne Vigibot, car actuellement, l'appli Web que j'ai faite fonctionne via Websockets. Je devrai peut-être exposer une API REST pour pouvoir faire communiquer Wall-E avec Vigibot.






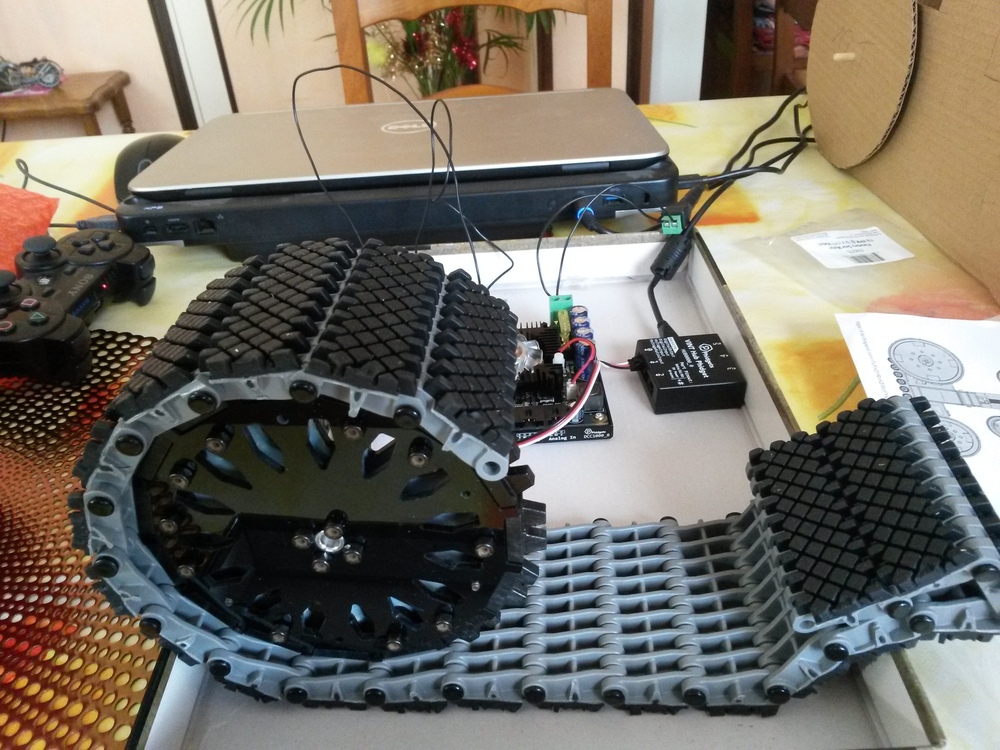

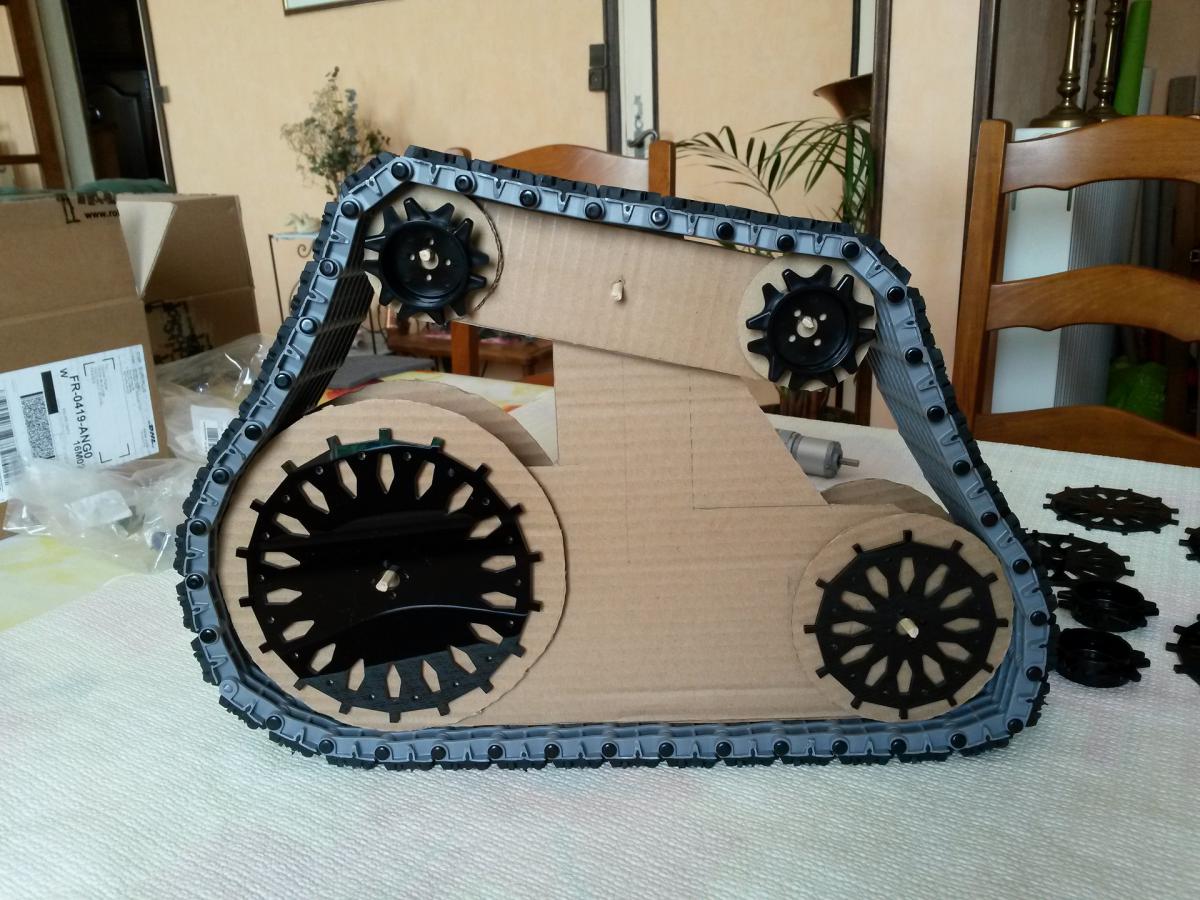

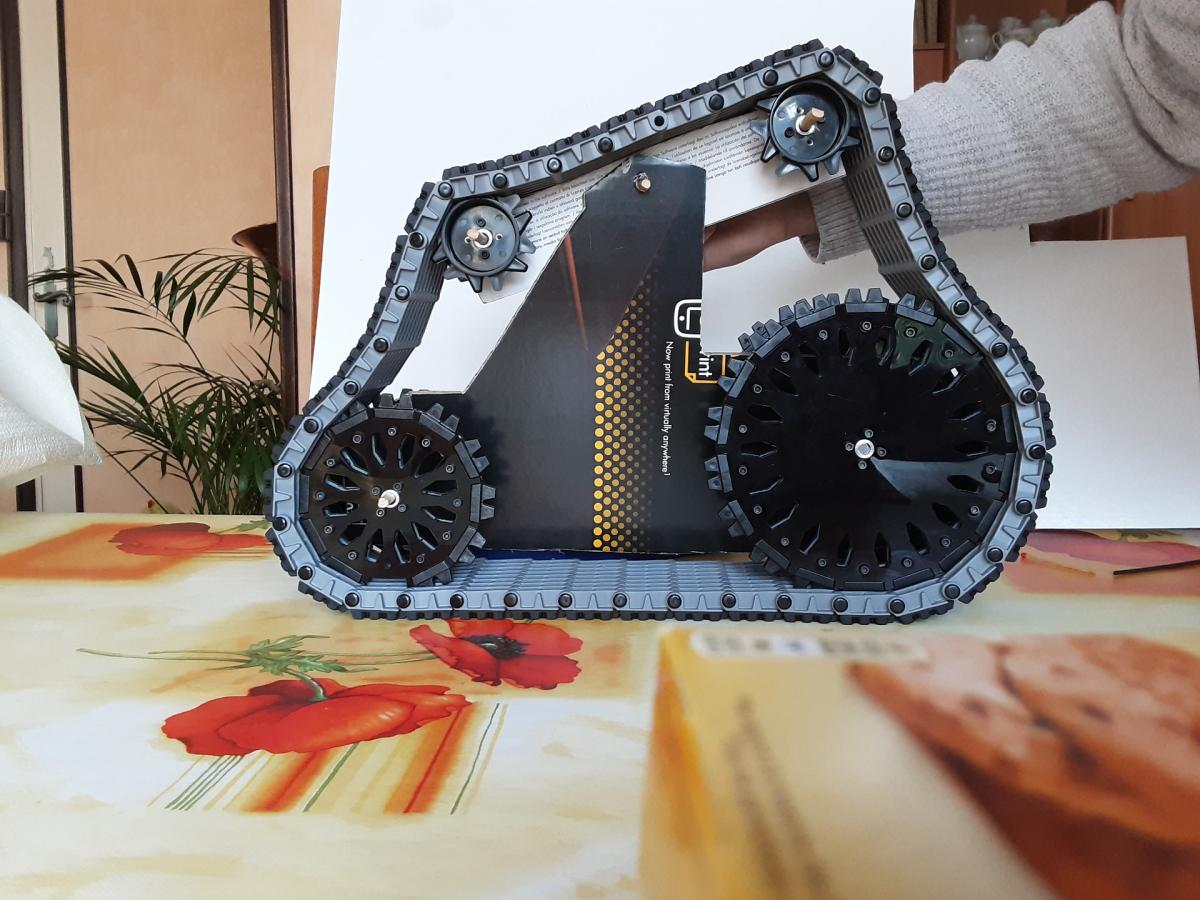
 Pour la vraie structure, il faudra sûrement que j'ajuste au millimètre (axes, positions, ...) pour que ça soit moins lache.
Pour la vraie structure, il faudra sûrement que j'ajuste au millimètre (axes, positions, ...) pour que ça soit moins lache.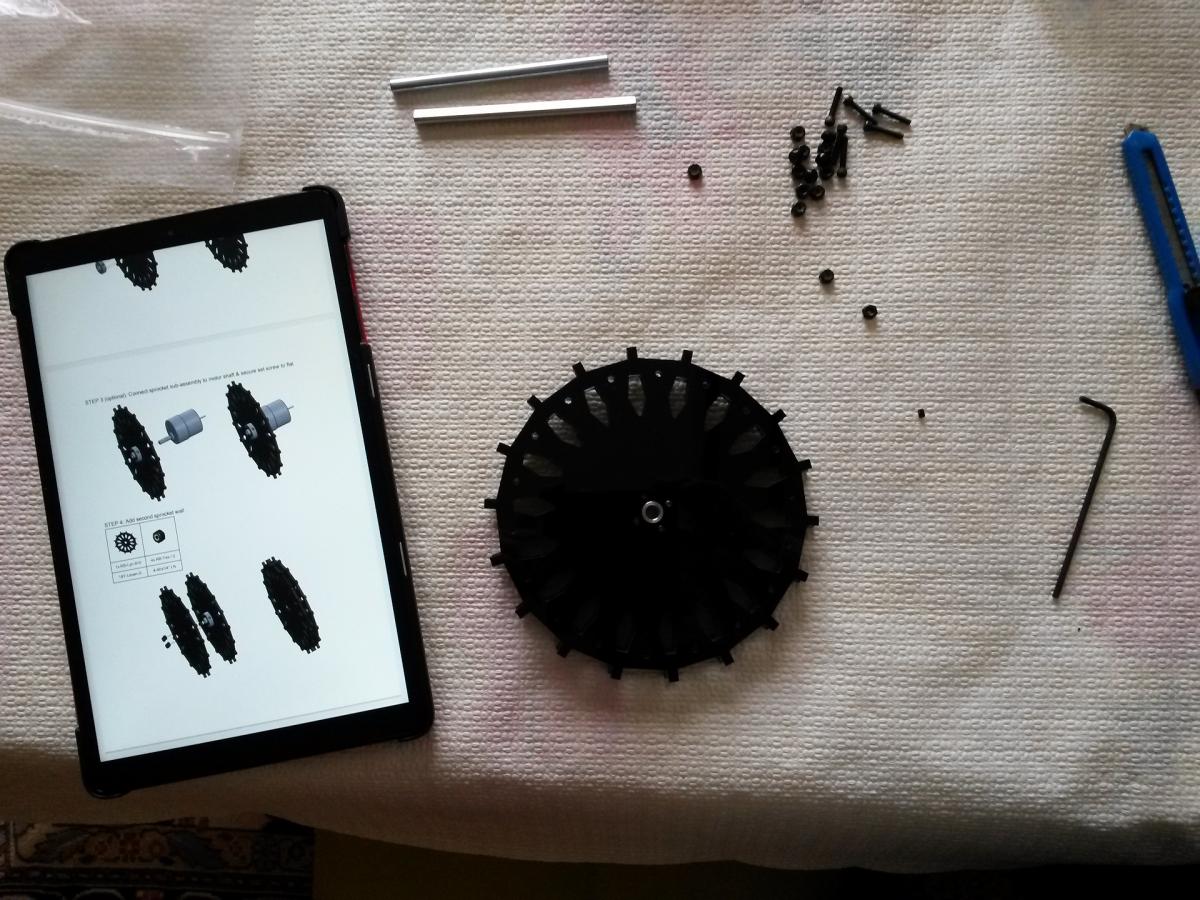















![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)


