Je voulais dire vraiment tout, atmega, driver, filtre etc. Comme ça il vous faut rien d'autre


Présentation du projet Servomoteur à rotation continue adressable en I²C
Débuté par thermo_nono, juil. 23 2018 01:36
80 réponses à ce sujet
#63

thermo_nono
-
- Membres
-

- 825 messages
Membre passionné
Posté 07 août 2018 - 12:03
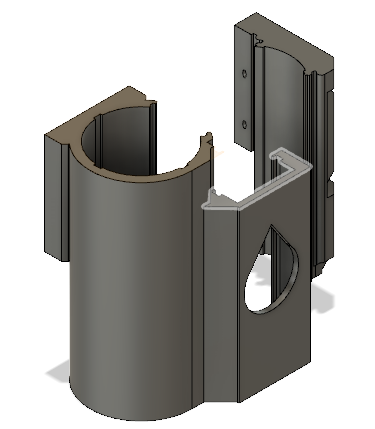
J'ai tenté de réaliser un modèle 3D avec tout du même côté, c'est franchement pas le top :
impossible à faire sur deux étages car le PCB du driver doit tenir avec des vis (composants trop près du bord pour envisager une glissière), du coup il faudrait mettre le nano au dessus (plus de 1cm au dessus à cause du bornier sur le PCB du driver), mais le nano est moins large que le driver, du coup c'est la misère pour faire une glissière (je suis pour le moment contraint à prévoir une glissière pour le nano car les plus petites vis du magasin de modélisme font 2.2mm de diamètre ce qui est encore bien trop gros).
Du coup je me demandais ce que ça apporte de mettre tout du même côté ? (à part économiser quelques centimètres de fil)... quel est l'intérêt ?
Pour ma part, je continue de penser que mettre un PCB de chaque côté fait gagner beaucoup de place et je pense qu'il est plus logique de répartir les éléments autour de l'axe puisqu'un moteur a un mouvement circulaire (on gagne en liberté de mouvement).
#64
Mike118
-

- Administrateur
-
- 10â¯279 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 07 août 2018 - 05:03
Et faire un L ? genre la nano sur le côté et le driver au cul du moteur ?
Après sinon tu fais comme tu veux hein ^^ Moi je dis ça comme ça si jamais l'idée peut t'intéresser =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#65
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 07 août 2018 - 05:53
L'important, c'est d'avancer !
Fait comme tu l'entends, puis rien ne t'empêchera de faire une V2 et une V3.
Fait comme tu l'entends, puis rien ne t'empêchera de faire une V2 et une V3.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#66
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 07 août 2018 - 08:18
Et faire un L ? genre la nano sur le côté et le driver au cul du moteur ?
Après sinon tu fais comme tu veux hein ^^ Moi je dis ça comme ça si jamais l'idée peut t'intéresser =)
Oui, je n'ai pas encore essayé avec le driver à l'arrière mais ça pourrait être la solution.
L'important, c'est d'avancer !
Fait comme tu l'entends, puis rien ne t'empêchera de faire une V2 et une V3.
C'est juste. Aujourd'hui je me remet sur le schéma histoire de progresser... et je vais imprimer le boitier que j'ai modélisé hier pour voir mes erreurs.
Ha oui.. autre chose qui pourra vous sembler bête : j'aurai aimé appeler ce moteur "Golgotha", d'une part parce que c'est biblique ^^, mais surtout parce qu'étant de la génération Goldorak, les golgoths font parti des robots qui ont bercé mon enfance. Concernant le côté biblique j'ai appris dans wikipédia que "L'art religieux (peintures, sculptures, etc.) représente souvent des crânes afin de rappeler cette histoire."... ce qui n'est pas sans rappeler le logo des hacker-makers. ^^

- Path aime ceci
#67
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 08 août 2018 - 06:31
On a pas le même age et donc, pas la même culture. Mais j'ai des enfants, et j'ai donc suivi de loin, très loin, ce genre de séries.Ha oui.. autre chose qui pourra vous sembler bête : j'aurai aimé appeler ce moteur "Golgotha", d'une part parce que c'est biblique ^^, mais surtout parce qu'étant de la génération Goldorak, les golgoths font parti des robots qui ont bercé mon enfance.
A mon avis, les faiseurs de dessins animés japonais, sans doute très éloignés de notre culture, ont allègrement confondu, les termes "Goliath" et "Golgotha". Les deux ayant une référence biblique.
D'après ce que je comprends, les "Golgoths" seraient des robots géants, et donc ils feraient référence à "Goliath" qui est le géant de la bible, terrassé par David, à l'aide d'un lance pierre.
Sauf qu'ils auraient dû s'appeler les "Goliotes", ou quelques chose comme ça. Pas terrible…
Par contre, les haker-makers, eux font référence au drapeau de la piraterie qui, à mon avis, n'a rien à voir avec le mont Golgotha de Jérusalem, même si l'emplacement des os est similaire, ce qui est archi courant dans le monde entier. Les chinois, les africains, les européens et tous les autres ayant la même tête, une fois mort...
Bref, tout ceci est un fatras d'ignorance et d'inculture, mais on est plus à ça près.
Moi, j'ai juste mon certif. On m'a appris à lire, j'en ai peut être un peu trop abusé.
Ici, tout le monde est très diplômé, et à même de se faire une idée. C'est à vous de voir.
Perso, je vote, contre.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#68
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 08 août 2018 - 07:17
" Accours vers nous prince de l'espace ... " J'étais un grand fan !!
En plus, pas le choix, il ressemble déjà à un Golgoth ce moteur 
- zavatha et thermo_nono aiment ceci
#69
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 19 août 2018 - 07:39
Est ce que l'Arduino Pro Micro ne serait pas plus adapté à ton projet du point de vue de la taille ?
https://store.arduino.cc/arduino-micro
'https://www.youtube....?v=7WlHo9Qjzzk'
https://store.arduino.cc/arduino-micro
'https://www.youtube....?v=7WlHo9Qjzzk'
- Melmet aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#70
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 19 août 2018 - 08:19
Ha oui, en effet. je n'ai pas vérifié le nombre de sorties PWM (dans l'idéal il m'en faudrait 4, au minimum deux)..
Je dois dire que ces précieux millimètres m'auraient bien aidé...
Je dois dire aussi que je repense à la proposition d'Ashira qui consistait à refaire un PCB dédié et qui me plaisait bien (mais que je risque d'avoir du mal à réaliser vu mon niveau ^^).
.. je vais aller jeter un oeil sur les différences entre le le nano et le pro.
merci.
#71
ashira
-

- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 19 août 2018 - 05:18
C'est pas si difficile que ça. Tu fais ton schéma puis tu routes en suivant quelques règles de conception. Pour ce cas la ça ne nécessite pas de design particulier. En prenant juste un atmega328 et 2 ao4606 pour ton driver. 
#72
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 19 août 2018 - 05:36
Aïe.. ça existe déjà !
Je croyais avoir bien cherché mais apparemment pas assez... je viens de tomber sur un site qui me fout les boules :
https://hackaday.io/...er-for-robotics
.. ça fait mal !.... :-(
bon, je ne vais pas abandonner en si bonne voie.. après tout il me reste tellement à apprendre... ça reste un projet sympa à étudier. ^^
#73
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 19 août 2018 - 05:43
C'est avec un PIC.Aïe.. ça existe déjà !
Toi, c'est avec Arduino.
Donc cela vaut largement le coup de continuer.
- Forthman aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos



#76
ashira
-
- Modérateur
-
- 1â¯333 messages
Membre chevronné
- Gender:Male
Posté 25 août 2018 - 09:14
Je pensais à ton driver tout à l'heure, tu pourrais te démarquer niveau puissance ?
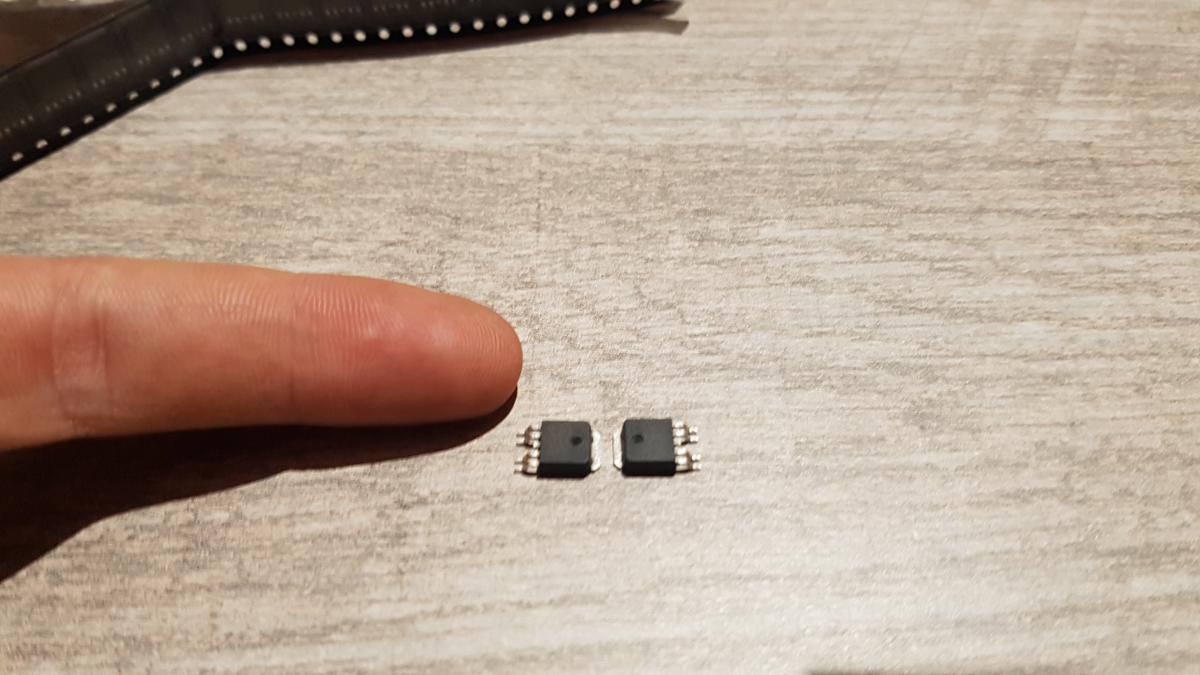
Avec des demi pont (fdd8424h) tu pourrais faire un driver qui contrôle des plus gros moteurs pour une carte pas plus grosse ^^
- Melmet et thermo_nono aiment ceci
#77
thermo_nono
-
- Membres
-
- 825 messages
Membre passionné
Posté 28 août 2018 - 12:17
si j'ai bien compris, les fdd8424h me permettraient d'alimenter le moteur de 4.5V à 40 V.. si c'est bien ça, c'est une excellente idée, par contre si j'alimente le système en plus de 12 V il faudra que j'ajoute un convertisseur DC-DC pour abaisser entre 5V et 12 V afin d'alimenter l'arduino... et pour ce qui est de souder des mini composants en surface je suis trop nul, je n'y arriverai jamais... il existe en un peu plus gros avec des vraies pattes ? ^^
J'essayerai de l'inclure sur le PCB quand je (ou vous car c'est un projet collectif) dessinerai(ez) les schema/typon de l'arduino dédié.
merci pour cet apport.
..
de mon côté ça va mal : mon PLA a pris l'humidité je n'arrive plus à imprimer des trucs corrects... je me suis enfin procuré une barre d'interrupteurs et les diodes pour coder l'identifiant I²C.. mais mes gros doigts boudinés ont tout foiré lors du soudage.. il faut que je retourne en acheter. ^^
#78
Forthman
-

- Membres
-
- 1â¯484 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 28 août 2018 - 12:32
pour du CMS ces composants sont simples à souder, même un mauvais comme toi peut y arriver sans problème 
- thermo_nono aime ceci
#79
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 août 2018 - 01:30
Une petite vidéo pour l'apprentissage de la soudure, ça ne peut pas faire de mal, 'https://www.youtube....?v=sXKvqmXQI8o'
Plutôt que de faire quelque chose de parfait dans la première version, il me semble que ce serait déjà un grand pas de faire fonctionner l'ensemble des éléments, à plat sur un planche de test. Non ?
Plutôt que de faire quelque chose de parfait dans la première version, il me semble que ce serait déjà un grand pas de faire fonctionner l'ensemble des éléments, à plat sur un planche de test. Non ?
- thermo_nono et Oliver17 aiment ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




