

Bonjour,
J'ai pour projet de piloter un moteur Nema 17 piloter avec un pilote TB6600 + une carte arduino UNO.
Les branchements sont les suivants :
ENA-(ENA), DIR-(DIR) & PULL-(PULL) --> relié à l'un des ports GND de la carte Arduino Uno
ENA+(+5V) --> relié à DIGITAL PORT 8 de la carte Arduino Uno
DIR+(+5V) --> relié à DIGITAL PORT 7 de la carte Arduino Uno
PULL+(+5V)-- > relié à DIGITAL PORT 4 de la carte Arduino Uno
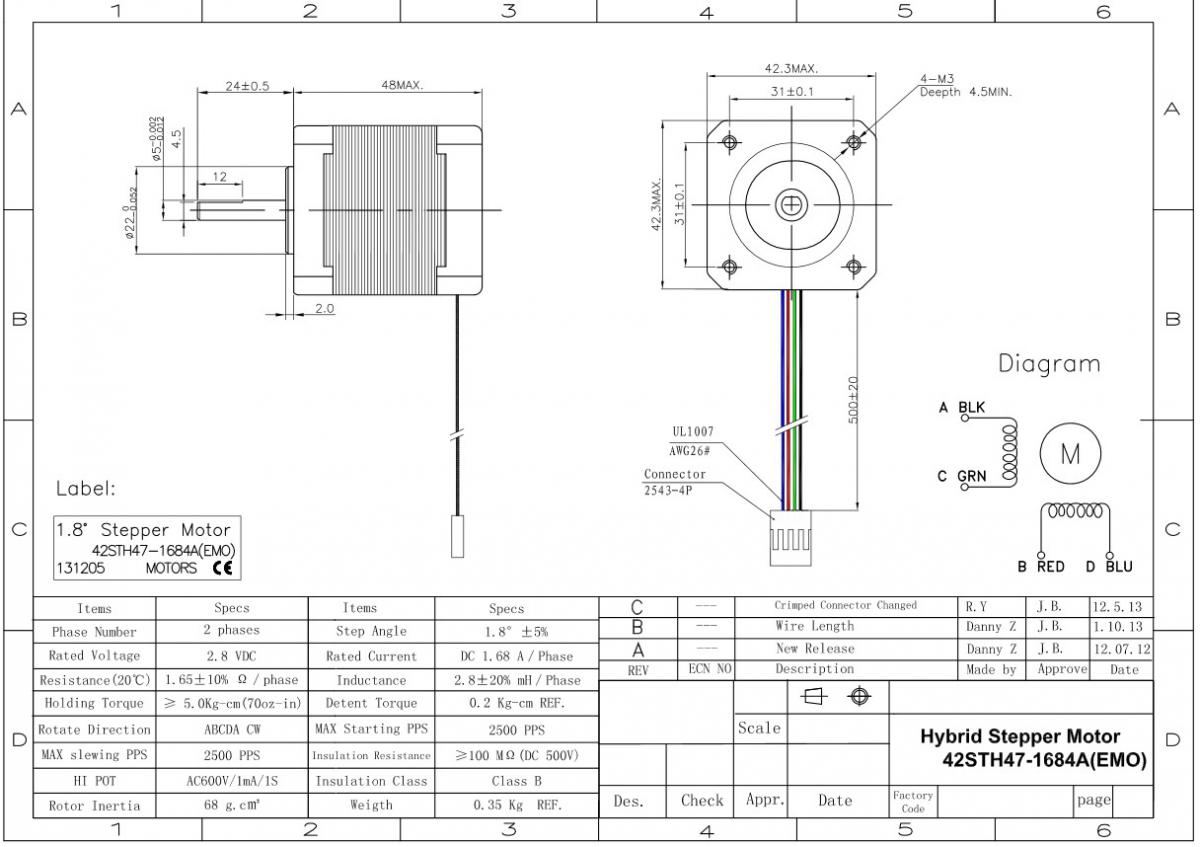
B- --> relié à câble bleu du moteur Nema
B+ --> relié à câble rouge du moteur Nema
A- --> relié à câble vert du moteur Nema
A+ --> relié à câble noir du moteur Nema
GDN TB6600 > relié à V- de l'alimentation 12V400W
VCC --> V+ de l'alimentation 12V400W
Est-ce que ce code pourrait convenir ?
AccelStepper stepper(1, 8, 7);
void setup()
{
stepper.setMaxSpeed(10000);
}
void loop()
{
stepper.setSpeed(4000);
stepper.runSpeed();
}
Je me suis inspiré du web.
Par contre je ne comprends pas comment déterminer le 10000.
Merci d'avance pour vos retours.




 Je m'explique : si je lance le programme, le moteur devrait tourner mais a priori sans s'arrêter ? comment peut-on faire pour le faire tourner pendant un temps donné voire peut-être mieux pour moi le "stopper proprement" ? Je me suis posé cette question car quand j'ai téléversé "Blink", dès que je branche la carte UNO, ça clignote exactement comme je l'avais programmé avant, et donc je me dis, si je téléverse le programme du moteur dans la carte, dès que je brancherai, il tournera (et du coup même, je ne suis pas sûr qu'on puisse tout débrancher alors que le moteur tourne ?
Je m'explique : si je lance le programme, le moteur devrait tourner mais a priori sans s'arrêter ? comment peut-on faire pour le faire tourner pendant un temps donné voire peut-être mieux pour moi le "stopper proprement" ? Je me suis posé cette question car quand j'ai téléversé "Blink", dès que je branche la carte UNO, ça clignote exactement comme je l'avais programmé avant, et donc je me dis, si je téléverse le programme du moteur dans la carte, dès que je brancherai, il tournera (et du coup même, je ne suis pas sûr qu'on puisse tout débrancher alors que le moteur tourne ?  pourriez-vous m'éclairer sur cet aspect ?
pourriez-vous m'éclairer sur cet aspect ? 
 .
.









