Très grosse galère !
A l'extérieur, la moindre brise fait écho des ultrasons.
J'avais déjà eu ce problème l'année dernière avec des capteurs Lego.
Et bien, j'en conclu que les HC-SR04 réagissent de la même manière.
Il n'y a pas de raison que cela en soit autrement.
Cela veut que je ne pourrai pas utiliser un capteur à ultrasons pour détecter le portique.
En conséquence, je vais faire marcher mon quadrupède avec une temporisation.
Cela veut dire, beaucoup de tests sur place pour affiner la temporisation
A savoir que, au delà d'une certaine distance après le portique, on est éliminé.

DeltaQuad et FiveBarQuad
Débuté par Oracid, mars 03 2019 12:12
62 réponses à ce sujet
#21

Oracid
-
- Modérateur
-

- 6â¯798 messages
Pilier du forum
- Gender:Male
#22
macerobotics
-

- Membres
-
- 148 messages
Membre occasionnel
- Gender:Not Telling
- Location:Bretagne
Posté 14 septembre 2019 - 08:52
Bonjour,
Tu peux utiliser les capteurs de distance de type VL53L0X (2m) ou VL53L1X (4m) utilisant une technologie Time of Flight.
Mace Robotics - mobile platform for education makers and research.
#23
Thot
-

- Membres
-
- 327 messages
Membre passionné
- Gender:Male
- Location:Toulouse
Posté 14 septembre 2019 - 09:04
Dire que les chauve-souris choppent des moustiques dans le noir avec des ultrasons... c'est frustrant quand même.
Je confirme. Ces petits capteurs i2c sont pratiques pour leur petit prix.
En extérieur et notamment sous la tente de la course, je te conseille la version 4m qui se réduit a 1m30 avec une casquette (a inventer en lego )
)
Pour la librairie arduino, le réglage est avec un timingbudget de 20 et configuration ShortRange (la puissance du laser est plus forte)
En plus tu as des infos si c'est trop près, trop loin, pas précis...
Pour le moment je n'ai pas eu de mauvaises surprises.
Je confirme. Ces petits capteurs i2c sont pratiques pour leur petit prix.
En extérieur et notamment sous la tente de la course, je te conseille la version 4m qui se réduit a 1m30 avec une casquette (a inventer en lego
)Pour la librairie arduino, le réglage est avec un timingbudget de 20 et configuration ShortRange (la puissance du laser est plus forte)
En plus tu as des infos si c'est trop près, trop loin, pas précis...
Pour le moment je n'ai pas eu de mauvaises surprises.
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
#24
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 14 septembre 2019 - 10:16
Merci pour votre aide.
Je vais commander le VL53L0X, disponible dans la boutique. https://www.robot-ma...61-vl53l0x.html
Je me rappelle que l'an dernier, il y avait de gros problèmes de luminosité sous la tente, en raison du soleil.
Si cela ne fonctionne pas, je mettrai une temporisation. Ce n'est pas très élaboré, mais ça fonctionne.
Je vais commander le VL53L0X, disponible dans la boutique. https://www.robot-ma...61-vl53l0x.html
Je me rappelle que l'an dernier, il y avait de gros problèmes de luminosité sous la tente, en raison du soleil.
Si cela ne fonctionne pas, je mettrai une temporisation. Ce n'est pas très élaboré, mais ça fonctionne.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#25
Thot
-
- Membres
-
- 327 messages
Membre passionné
- Gender:Male
- Location:Toulouse
Posté 14 septembre 2019 - 10:19
Attention, la version 2m (0X) porte a 20cm en extérieur.
- arobasseb aime ceci
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
#26
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 14 septembre 2019 - 01:13
Je ne comprends pas. Que veux tu dire ?Attention, la version 2m (0X) porte a 20cm en extérieur.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#27
Mike118
-

- Administrateur
-
- 9â¯985 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 14 septembre 2019 - 03:38
Il veut dire que le capteur peut être soumis à des perturbations en extérieur.
D'après son expérience en plein soleil le capteur ne porte qu'à 20 cm ...
Est ce que mettre des protection de type oeillère peut changer la donne ? Je reconnais ne pas avoir d'expérience avec ce capteur en extérieur...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#28
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 14 septembre 2019 - 05:58
Je ne comprends pas !D'après son expérience en plein soleil le capteur ne porte qu'à 20 cm ...
Il s'agit d'une diode Laser, donc le récepteur doit super filtrer la fréquence.
De doute façon, cela me permettra de découvrir ces capteurs.
Ce sera toujours ça de pris.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#29
Thot
-
- Membres
-
- 327 messages
Membre passionné
- Gender:Male
- Location:Toulouse
Posté 14 septembre 2019 - 08:01
Oui, c'est ça, ce capteur est bien pulsé mais l'intensité émise ne doit pas être suffisante pour couvrir le bruit direct emis par le soleil. Et pour avoir testé, la différence apparaît même a l'intérieur avec fenêtre ouverte en plein soleil. Fenêtre fermée tout va mieux. C'est une histoire d'infrarouges. Avec une casquette, on gagne en portée. Mais je n'ai pas testé la casquette avec le capteur 0X.
Mais vu le prix, ca vaut le cout de tester si tu veux, c'est assez fun. Et puis en intérieur ça marche bien, pour d'autre créations.
Pour mesurer des angles entre deux barres lego c'est pas mal :-)
Mais vu le prix, ca vaut le cout de tester si tu veux, c'est assez fun. Et puis en intérieur ça marche bien, pour d'autre créations.
Pour mesurer des angles entre deux barres lego c'est pas mal :-)
- Oracid aime ceci
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
#30
Sandro
-

- Modérateur
-
- 1â¯269 messages
Pilier du forum
- Gender:Male
Posté 14 septembre 2019 - 08:36
J'ai pas testé le capteur, mais quelques considérations théoriques:
Le capteur utilise du 940 nm. Le soleil, d'après https://fr.wikipedia...tre_solaire.png émet environ 0.25W/m²/nm au niveau de la mer (nb : c'est plus du triple pour des longueurs d'ondes à peine plus longues car on sort d'une raie d’absorption de la vapeur d'eau).
D'après le datasheet du capteur : https://www.st.com/r...eet/vl53l0x.pdf, celui-ci consomme en pointe 40mA à 1.8V soit 0.072W (je suppose que vue qu'ils conseillent d'ajouter des capas externe c'est qu'il n'y en a pas à l'intérieur, et donc que la puissance du laser correspond à celle de la consommation).
Le cône d'émission fait 35°. En supposant que la cible est à 1m, et que la surface réfléchit 100% de la lumière (comme un miroir idéal), alors une fois revenue dans le plan du capteur, la lumière est répartie sur un disque de rayon r=2m*tan(35°/2)=0.63m car elle formait un cône de 2m de haut et d'angle 35° au sommet. Cela correspond à une surface de A=pi*r²=1.25m².
Si on suppose que la puissance est répartie homogènement, alors on est à P/A=0.058 W/m².
Donc si, à 1m, tu vises droit vers le soleil, alors même si capteur est très sélectif (1nm de bande passante), alors la puissance venue du soleil est déjà 5 fois plus intense que celle du laser. Autrement dit, il y a de fortes chances que même en utilisant des différences d'intensités (pulses de laser), ça devienne difficile de faire une mesure.
En pratique, tu ne visera probablement pas directement le soleil (surtout si tu es dans une tente), mais je pense que le filtrage est probablement beaucoup moins sélectif que 1nm.
Donc je pense que viser le soleil directement ne marchera pas. Si tu vises une zone très lumineuse qui ne filtre pas le 940 nm, alors tu aura probablement quand même des problèmes.
Réduire la lumière qui vient du soleil (casquette) ne fera sûrement pas de mal, mais je ne sais pas si ce sera suffisent (si tu vises droit le soleil, même à travers la tente, je doute que ça marche, si tu vises un peu à coté, aucune idée, il faudrait trester)
- macerobotics aime ceci
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#31
Thot
-
- Membres
-
- 327 messages
Membre passionné
- Gender:Male
- Location:Toulouse
Posté 14 septembre 2019 - 09:04
C'est un laser donc le cone d'émission est petit. Je pense que c'est le cone d'exclusion qui est donné a la fin. Ce capteur est pratique justement parce qu'il mesure des distances ponctuelles. Mais il n'empêche que tes réflexions théoriques expliquent pas mal de choses. Dans le datasheet, ils parlent des conditions outdoor a 50000lux pour 40cm sur un obstacle gris, sachant qu'un plein soleil equivaut a 100000lux, ça se tient les 20cm.
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
#32
Sandro
-
- Modérateur
-
- 1â¯269 messages
Pilier du forum
- Gender:Male
Posté 14 septembre 2019 - 09:22
Justement, je ne crois pas que ce laser soit si sélectif, vu que la détection est garantie dans un field of view (FOV) de 25°. Donc soit le laser a intrinsèquement un cône d'émission assez large (pour un laser, ça reste quand même moins que pour un capteur ultrason), soit ils ont rajouté une lentille pour créer ce cône d’émission plus large
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#33
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 15 septembre 2019 - 07:14
Merci pour toutes ces explications qui sont très intéressantes.
Je vais sans doute faire une temporisation.
Pour ce concours, je mets en oeuvre des solutions très rustiques, mais qui fonctionnent.
L'année dernière, j'ai vu beaucoup de robots se planter pour pas grand chose, comme ne pas faire marche arrière dans un évitement.
J'ai eu l'idée de cumuler dynamiquement le temps nécessaire à chaque évitement et de l'ajouter au temps estimé au parcours sans évitement.
De cette manière, je pense que je ne devrais pas dépasser la ligne d'exclusion.
Pour mémoire, il s'agit de faire 10m en ligne droite, sur une piste de 1,8m de large, sans obstacle.
Il y a pire comme conditions !
Cette simplicité du parcours mets en évidence les capacités de base des quadrupèdes ou des bipèdes.
C'est ce qui m'intéresse, pour le moment.
Je vais sans doute faire une temporisation.
Pour ce concours, je mets en oeuvre des solutions très rustiques, mais qui fonctionnent.
L'année dernière, j'ai vu beaucoup de robots se planter pour pas grand chose, comme ne pas faire marche arrière dans un évitement.
J'ai eu l'idée de cumuler dynamiquement le temps nécessaire à chaque évitement et de l'ajouter au temps estimé au parcours sans évitement.
De cette manière, je pense que je ne devrais pas dépasser la ligne d'exclusion.
Pour mémoire, il s'agit de faire 10m en ligne droite, sur une piste de 1,8m de large, sans obstacle.
Il y a pire comme conditions !
Cette simplicité du parcours mets en évidence les capacités de base des quadrupèdes ou des bipèdes.
C'est ce qui m'intéresse, pour le moment.
- Little french kev aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#34
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 16 septembre 2019 - 06:05
Voilà, je suis prêt !
Mon quadrupède fera les 10m en 50".
Mon idée d'incrémenter la temporisation en cas d'évitement fonctionne très bien.
Snif ! Je m'ennuie à mort depuis 5 minutes…
Bon, et bien, je vais attaquer le suivant…
Plus grand ! Plus beau ! Plus fort !
Mon quadrupède fera les 10m en 50".
Mon idée d'incrémenter la temporisation en cas d'évitement fonctionne très bien.
Snif ! Je m'ennuie à mort depuis 5 minutes…
Bon, et bien, je vais attaquer le suivant…
Plus grand ! Plus beau ! Plus fort !
- pmdd aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#35
pmdd
-

- Membres
-
- 961 messages
Membre chevronné
- Gender:Male
Posté 16 septembre 2019 - 06:25
Voilà, je suis prêt !
Mon quadrupède fera les 10m en 50".
Mon idée d'incrémenter la temporisation en cas d'évitement fonctionne très bien.
Snif ! Je m'ennuie à mort depuis 5 minutes…
Bon, et bien, je vais attaquer le suivant…
Plus grand ! Plus beau ! Plus fort !
c'est le vide abyssal après un projet...une forme de mélancolie, surtout quand on les détruit pour refaire autre chose...
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#36
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 16 septembre 2019 - 08:27
Aujourd'hui, je les garde un peu pour éventuellement faire une comparaison dans une vidéo.c'est le vide abyssal après un projet...une forme de mélancolie, surtout quand on les détruit pour refaire autre chose...
Mais c'est vrai que je ne peux pas tout garder.
Non pas que je n'ai pas suffisamment de pièces, mais c'est surtout la place qui me manque.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#37
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 17 septembre 2019 - 02:14
Cliquez moi.
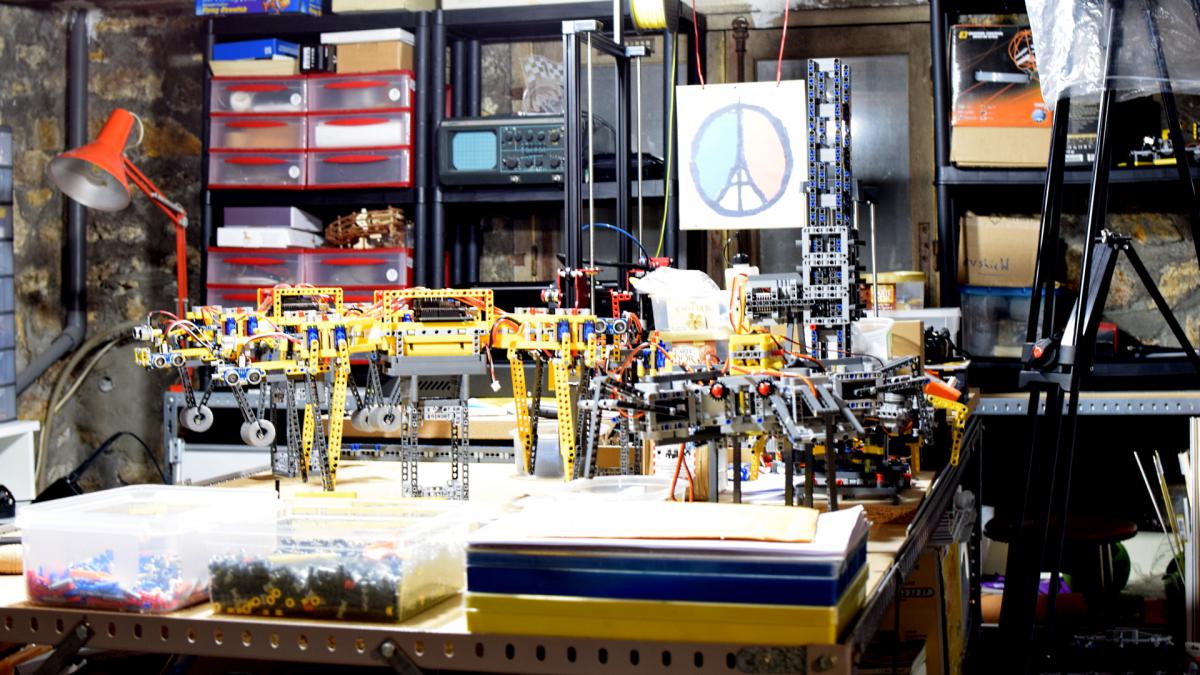
La vraie vie ! Avec un environnement de travail très encombré.
Là, il y a 3 quadrupèdes, 2 spiders et une tour de tests qui ne m'a jamais servi.
Au premier plan, vers la gauche, voici le dernier né que j'ai commencé hier.
Il est beaucoup plus gros, mais là, ce n'est pas flagrant. S'il fonctionne bien, je l'emmènerai à Toulouse.
Pour les quadrupèdes, je ne démonte pas.
J'utilise la version précédente comme bas de réflexion et j'essaye de freiner mes ardeurs.
La vraie vie ! Avec un environnement de travail très encombré.
Là, il y a 3 quadrupèdes, 2 spiders et une tour de tests qui ne m'a jamais servi.
Au premier plan, vers la gauche, voici le dernier né que j'ai commencé hier.
Il est beaucoup plus gros, mais là, ce n'est pas flagrant. S'il fonctionne bien, je l'emmènerai à Toulouse.
Pour les quadrupèdes, je ne démonte pas.
J'utilise la version précédente comme bas de réflexion et j'essaye de freiner mes ardeurs.
- Thot aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#38
pmdd
-
- Membres
-
- 961 messages
Membre chevronné
- Gender:Male
Posté 17 septembre 2019 - 03:16
Très grosse galère !
A l'extérieur, la moindre brise fait écho des ultrasons.
J'avais déjà eu ce problème l'année dernière avec des capteurs Lego.
Et bien, j'en conclu que les HC-SR04 réagissent de la même manière.
Il n'y a pas de raison que cela en soit autrement.
Cela veut que je ne pourrai pas utiliser un capteur à ultrasons pour détecter le portique.
En conséquence, je vais faire marcher mon quadrupède avec une temporisation.
Cela veut dire, beaucoup de tests sur place pour affiner la temporisation
A savoir que, au delà d'une certaine distance après le portique, on est éliminé.
Si tous ces capteurs pouvaient fonctionner indépendamment du milieu extérieur, mais c'est un rêve ! Les infra rouges sont sensibles aux variations de lumière, les ultrasons aux courant d'air, les deux sont sensibles aux matériaux (Essayez de détecter une paroi de mousse avec des ultrasons...) En plus ils ont des caractéristiques de détections difficiles à appréhender (les cônes de détection par exemple). C'est comme ça depuis l'origine des capteurs, ce n'est jamais la technique pure qui nous bride mais les conditions extérieures. En 1987 j'ai développé des applications de reconnaissance et d'analyse d'image par caméra sur un process industriel, et je me souviens d'avoir été embêté par la lumière parasite, la poussière et les variations de température. 30 ans après , pour un type d'application sensiblement identique, avec un matériel (hard et soft) largement plus sophistiqué, les problèmes ont été exactement les mêmes... facile de construire, de programmer un système automatique mais très complexe de gérer les variations extérieures. Le terrain, que ce soit une usine ou une piste de concours n'est pas un labo, je l'ai bien appris à mes dépends dernièrement sur le concours Warrior de Machine Gones.
- Little french kev aime ceci
Le robot semeur, Découpeur de gâteau, ouvreur de yaourt, allumeur de bougies, le grimpeur à la corde, Le labyrinthe et bien d'autres encore !
#39
Oracid
-
- Modérateur
-
- 6â¯798 messages
Pilier du forum
- Gender:Male
Posté 17 septembre 2019 - 08:35
Depuis que je suis en retraite, je me suis donné des objectifs très ambitieux, comme faire monter des escaliers à un char ou faire marcher un quadrupède.Si tous ces capteurs pouvaient fonctionner indépendamment du milieu extérieur, mais c'est un rêve !
Cela fait donc deux gros défis que je ne soupçonnais pas réussir il y a seulement 2 ans et même quelques mois pour le quadrupède.
Et pour réussir cela, je n'ai eu besoin d'aucun capteur. J'en suis le premier surpris, mais c'est comme ça.
Aujourd'hui, ce qui me sidère, c'est qu'avec l'un des servos le moins puissant et le moins cher du marché, je réussisse à faire marcher un quadrupède de bonne taille.
Comme beaucoup, ici, je pensais qu'il fallait des servos très puissants et bien sûr très chers pour faire des robots.
Cette prise de conscience récente m'ouvre de grandes perspectives, comme par exemple faire un bipède. Pourquoi pas.
Voila, c'est cela qui m'intéresse.
En réalité, ces problèmes de capteurs ne m'intéressent pas vraiment.
Tant mieux si je peux les contourner.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#40
Thot
-
- Membres
-
- 327 messages
Membre passionné
- Gender:Male
- Location:Toulouse
Posté 18 septembre 2019 - 09:59
On peut faire un bipède avec du fil de fer. Imagines on rajoute un moteur
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users





{kind=link}