Bon c'est pas tout mais la course se rapproche et la voiture n'est pas encore prête.
J'aurais pu la garder comme en 2019 et juste ajouter les roulettes arrières que j'ai déjà ajouté
Mais comme cette année je ne suis pas tout seul à venir, en effet je viens avec Colin on s'est dit qu'on pouvait faire un encore un peu mieux...
Du coup plusieurs axes de modifications :
1) Les capteurs avant
En 2019 je n'avais pas encore le lidar LD06 sur la boutique robot maker ... 
Ce lidar est vraiment tout petit tout mignon, et peut mesurer des distances jusqu'à 12m à 360° et à lui tout seul il pourrait être suffisant pour remplacer les 3 TF Mini plus que j'ai à l'avant de la voiture ... 
Du coup c'est assez tentant de remplacer les 3 télémètres TF mini plus par le Lidar LD06 ...
Mais n'ayant encore jamais utilisé le LD06 dans des conditions " extérieur " comme celles de la TRR sur un robot à grande vitesse j'ai un petit doute ...
Du coup en attendant d'être à 100% sûr que le LD06 convient à lui tout seul, on va opter pour la solution " ceinture est bretelles " ...
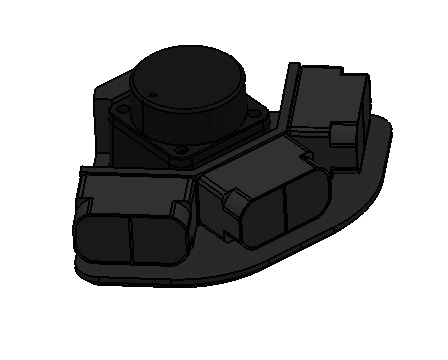
On pense remplacer notre ancien bloc de capteur avant : 
Par un nouveau bloc de capteurs avant qui intégrera les 3 TF Mini plus et le LD06...
Le but est simple :
On va tester des algo avec lidar uniquement, mais si ça ne s'avère pas suffisant ou que ça ne marche pas comme on veut on pourra toujours basculer à nouveau sur le système classique plus simple avec uniquement nos 3 TF Mini plus qui ont déjà été testé et approuvé ...
Mais pourquoi changer alors ?
L'avantage d'utiliser le Lidar c'est qu'il nous permet de nous rapprocher d'une configuration qui pourrait participer à l'épreuve " Dans la vraie vie ". ( On ne prévoit pas d'y participer lors de la TRR mini qui se déroule dans quelques semaines... Mais peut être qu'on pourra essayer lors de la rencontre suivante qui sait ! )
2) L'électronique de contrôle
En 2019 je m'y étais pris un peu au dernier moment et j'ai utilisé une arduino mega, et j'ai soudé quelques éléments sur une véroboard, mais depuis j'ai ajouté des nouveaux produits sur la boutique : les cartes Teensy et plus particulièrement les teensy 4.0 . Ces cartes sont des géniales, elles sont très petites, disposent d'un grand nombre de GPIO pour leur petite taille ( plus que les arduino nano en étant un peu plus petite) et surtout ce sont de vrais petits monstre en terme de puissance de calculs... On parle d'un ordre de grandeur de plus de 30x plus puissant ! 
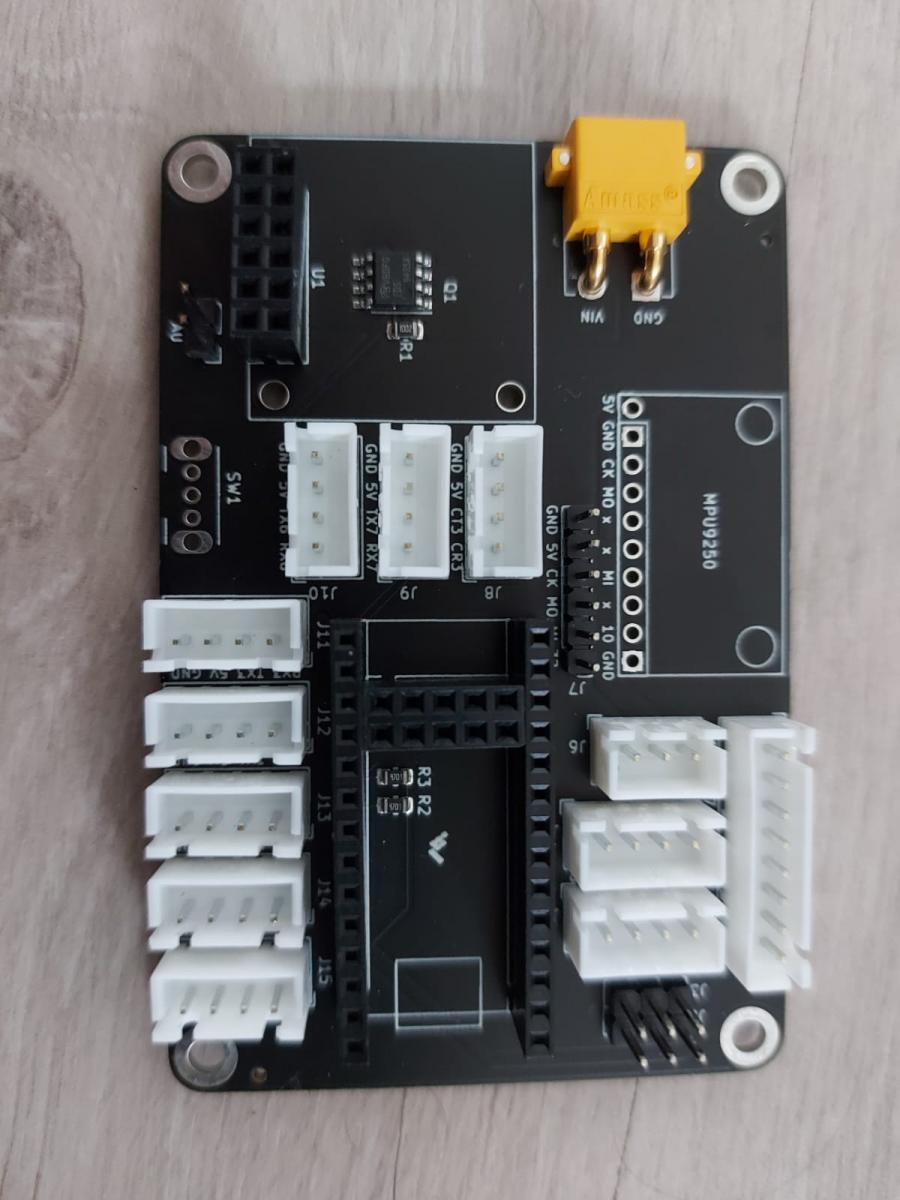
Du coup on a décidé de remplacer la mega par une Teensy 4.0 et par la même occasion de fabriqué un pcb dédié.
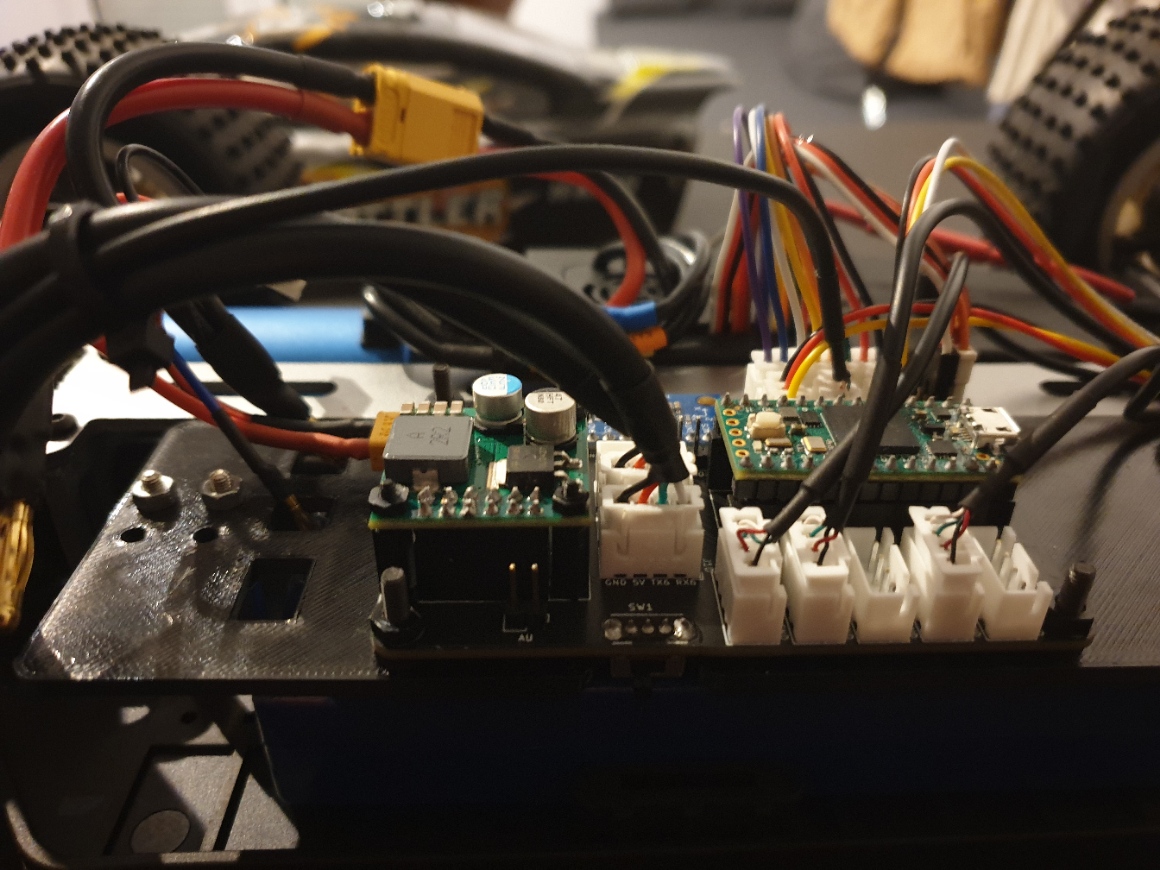
En plus d'intégrer le teensy 4.0 ce PCB intègre entre autre un convertisseur step down 5V et une centrale inertielle mpu9250 .
L'IMU pourra être utilisé pour son gyro et pourra permettre de connaitre l'angle du robot. ( Il pourra également éventuellement détecter le ralentisseur dans l'épreuve dans la vraie vie ... )
Petite photo de la carte que je viens tout juste de recevoir ( la teensy 4.0, le convertisseur step down et l'IMU ne sont pas encore montés )
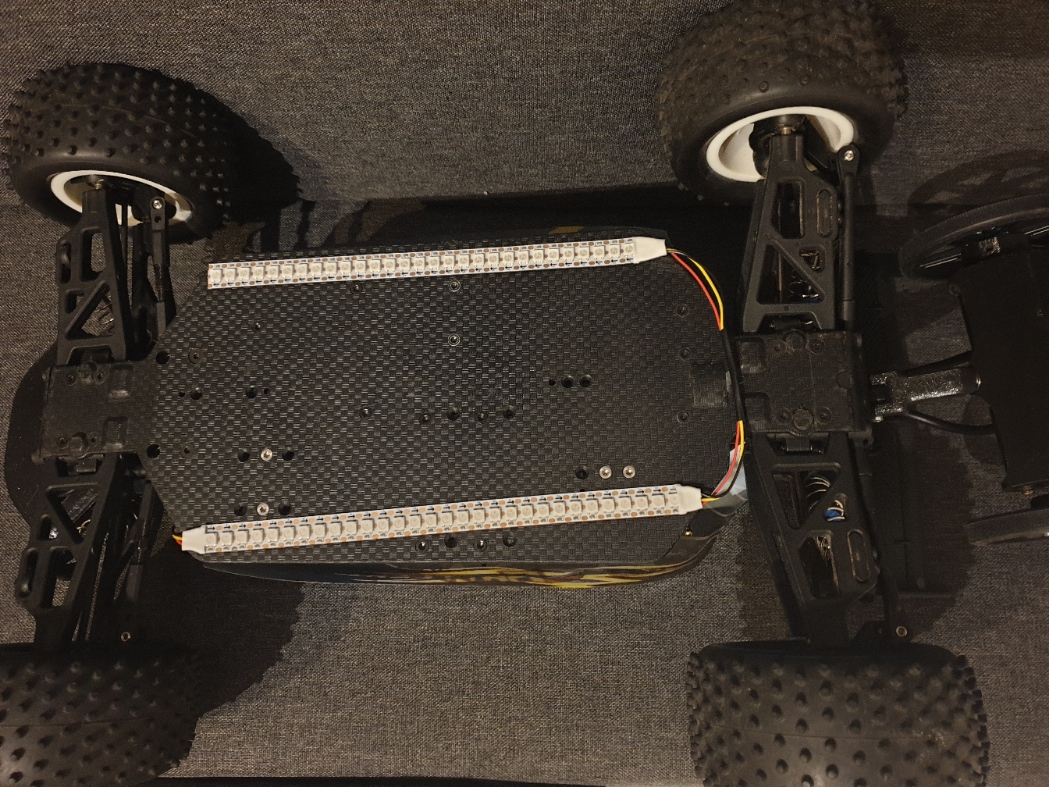
3) Ajouts de leds
On va ajouter quelques leds RGB adressables pour pimper un peu le robot  mais aussi et surtout pour nous fournir de manière visuelle des informations sur l'état du robot.
mais aussi et surtout pour nous fournir de manière visuelle des informations sur l'état du robot.
Je ne sais pas encore si on va utiliser des Rubans LED adressable ( ils sont très bien mais peut être un peu grand pour le besoin ... mais on peut les couper et c'est flexible... ) ou tout simplement des barrettes de 8 leds RGB adressables qui sont peu chères, et avec deux trous de fixation pour pouvoir les fixer ...
Reste à voir où est ce qu'on va pouvoir fixer tout ça... Sachant que malgré ces ajouts le but c'est de ne pas dénaturer la voiture ...
J'aurais bien aimé mettre un anneau de Led RGB adressable autour du lidar, mais j'ai un peu peur que ça ne passe pas en terme de dimensions à cause des suspensions du robot ...
Et il faut encore câbler le tout et fixer le tout dans le robot ... Et il faut programmer le robot ! Avec pas mal de code à revoir vu qu'on a remplacé l'arduino mega par une teensy.
La suite au prochain épisode !