


Notice pour ajouter votre robot raspberry pi sur Vigibot
Présenté par : Vigibot & Robot Maker

Ajouter votre propre robot sur Vigibot est facile!
Si vous avez un Raspberry Pi avec une connexion Internet, une carte micro SD 32Go voir 16Go, une alimentation 5V et une caméra Pi avec son câble ruban, vous pouvez mettre caméra en ligne sur www.vigibot.com dès maintenant en quelques étapes:
- Créez votre compte Vigibot sur www.vigibot.com ( ou connectez vous si vous avez déjà un compte ) .
- Cliquez sur "Gestion" puis sur "Ajouter un robot". Choisissez, le type de robot que vous souhaitez ajouter, votre nom de robot et son mot de passe et soumettez-le. Gardez-les à l'esprit, vous en aurez besoin en quelques étapes. ( Note : il vous faudra un nom de robot et un mot de passe suffisamment long, de plus vous ne pourrez pas prendre un nom de robot déjà pris par quelqu'un d'autre ... )
- Télécharger l'image Vigibot vigimage.zip
- Décompressez vigimage.zip et gravez l’image vigimage.img sur votre carte micro SD. (Sous Windows, vous pouvez utiliser "HDD Raw Copy Tool") .
Mais vous pouvez utiliser n'importe quel autre outil que vous utilisez peut être déjà comme win32diskImager (windows) ou ApplePiBacker (mac) balena etcher ( disponible sur windows, mac et linux) .
- Une fois l'image fraîchement gravée, ouvrez la partition /boot sur la carte SD.
- Modifiez le fichier "wpa_supplicant.conf" en fonction de la configuration de votre réseau wifi. (Modifiez le SSID "Vigibot.com" par le nom de votre connexion wifi, et le mot de passe par défaut "Vigipass" avec le mot de passe de votre connexion wifi pour qu'ils correspondent à votre propre réseau Wi-Fi. Si vous avez plusieurs réseau wifi vous pouvez mettre plusieurs " network " à la suite et difinir des priorités de connexions ... )
- Modifiez le fichier "robot.json" en fonction du nom du robot et du mot de passe du robot que vous avez précédemment choisis. (Modifiez "Démo" par le nom du robot et le mot de passe "Par défaut")
- Installez la carte SD dans votre Raspberry Pi avec la caméra installée, puis mettez-la sous tension (en raison du processus de compilation, le premier démarrage prend 10 minutes avant que le robot apparaisse sur le site Web: ne mettez pas le Raspberry Pi hors tension pendant ce temps)
- Jetez un coup d’œil sur le serveur www.vigibot.com. Votre robot devrait apparaître en premier dans la liste des robots sous "Mes robots".
Voilà!
Par défaut, vous êtes le seul à pouvoir voir votre robot. Configurez les autorisations si vous souhaitez le modifier, mais gardez à l'esprit que vous diffusez de la vidéo en direct, comme le font les gens, sur twitch et youtube live. Vous êtes responsable du contenu que vous diffusez.
PS : Notez que SSH est activé à l'intérieur de l'image fournie. N'oubliez donc pas de changer le mot de passe par défaut "raspberry" du compte "pi" pour des raisons de sécurité.
Pour ceux qui préfèrent les vidéo plutôt que du texte voici une version vidéo proposée par Pierro :
Vous pouvez maintenant connecter ce que vous voulez sur les GPIO de votre Raspberry Pi.
Par défaut la configuration est la suivante :
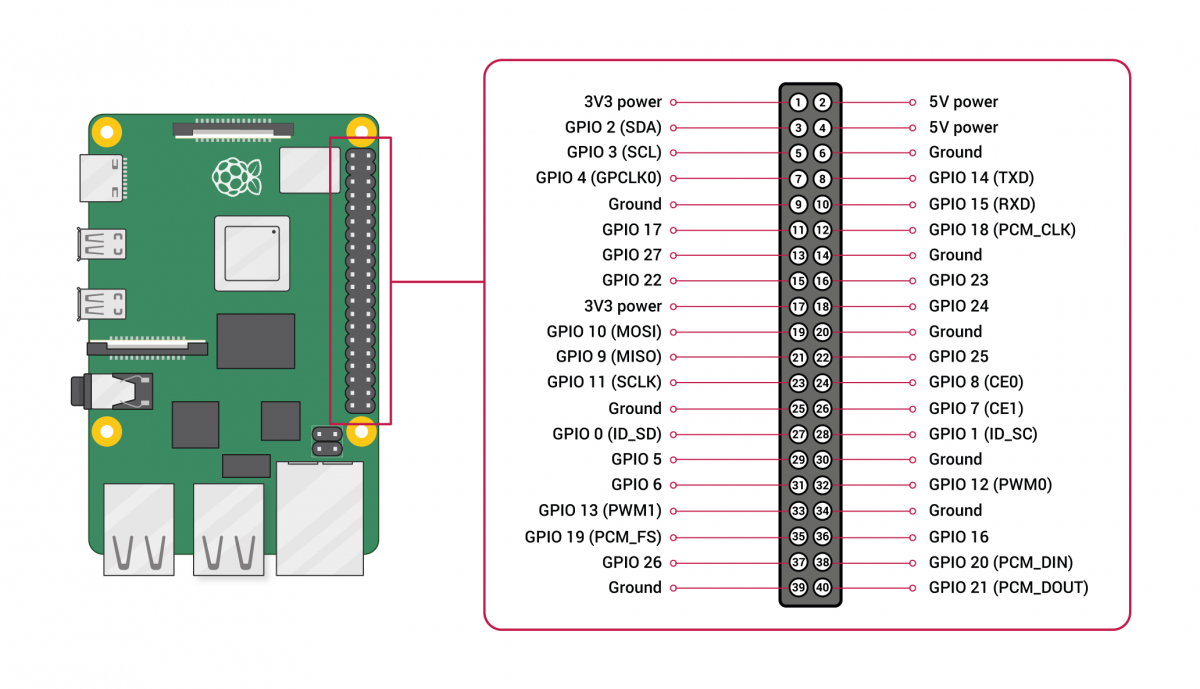
La première paire de servomoteurs (servo pan et tilt de la caméra) doit être connectée aux GPIO 5 et 6 du Raspberry Pi.
La deuxième paire de servomoteurs (pince) doit être connectée aux GPIO 7 et 8.
La carte qui permet de contrôler les moteurs comme des servomoteurs à rotation continue pour déplacer le robot doit être connectés aux GPIO 26 et 27.
Les LED, lasers, avertisseurs sonores, relais et autres éléments similaires doivent être connectés à GPIO 16 à 23.
Pour les utilisateurs d’Arduino, vous pouvez également choisir de connecter un Arduino ou un autre microcontrôleur au Rasperry pi à l’aide du port série GPIO 14 et 15.
Par défaut la configuration est la suivante :
La première paire de servomoteurs (servo pan et tilt de la caméra) doit être connectée aux GPIO 5 et 6 du Raspberry Pi.
La deuxième paire de servomoteurs (pince) doit être connectée aux GPIO 7 et 8.
La carte qui permet de contrôler les moteurs comme des servomoteurs à rotation continue pour déplacer le robot doit être connectés aux GPIO 26 et 27.
Les LED, lasers, avertisseurs sonores, relais et autres éléments similaires doivent être connectés à GPIO 16 à 23.
Pour les utilisateurs d’Arduino, vous pouvez également choisir de connecter un Arduino ou un autre microcontrôleur au Rasperry pi à l’aide du port série GPIO 14 et 15.
Si besoin vous pourrez modifier cette configuration par défaut pour correspondre à votre robot directement depuis l'interface Vigibot. Vous pouvez ajouter autant de servomoteurs que de GPIO Disponible, si vous n'utilisez pas des servomoteurs 360° ou bien mieux un convertisseur de moteurs cc en servomoteurs 360° , vous pouvez paramétrer votre robot de sorte à ce qu'il utilise différents drivers de moteurs comme le PCA9865 , L298n ou le L9110 ...
Voir ce sujet : comment paramétrer mon robot : https://www.robot-maker.com/forum/topic/13285-comment-configurer-mon-robot-vigibot-pour-piloter-moteurs-relais-et-leds/
Pour les utilisateurs d'Arduino Arduino vous trouverez ici un code d'exmple de communication série avec Arduino
Nous avons encore pas mal de tutoriel à rédiger mais en attendant si vous avez des questions, posez les ici sur le forum ou sur le discord vigibot. Vous recevrez de l'aide et du support technique
Note : quand nous parlons de GPIO nous parlons des numéros tel que présent sur cette image :
Voir ce sujet : comment paramétrer mon robot : https://www.robot-maker.com/forum/topic/13285-comment-configurer-mon-robot-vigibot-pour-piloter-moteurs-relais-et-leds/
Pour les utilisateurs d'Arduino Arduino vous trouverez ici un code d'exmple de communication série avec Arduino
Nous avons encore pas mal de tutoriel à rédiger mais en attendant si vous avez des questions, posez les ici sur le forum ou sur le discord vigibot. Vous recevrez de l'aide et du support technique
Note : quand nous parlons de GPIO nous parlons des numéros tel que présent sur cette image :
Avant d'aller plus loin, si vous n'avez pas encore vu "comment piloter votre robot sur vigibot " n'hésitez pas à aller y jeter un oeil pour découvrir toutes les fonctionnalités disponibles sur Vigibot.com !
Pour finir, sachez que pour faciliter la connexion des GPIOs de votre raspberry pi aux différents éléments que vous souhaiterez contrôler, nous avons créé deux hats pour raspberry pi :
Pour finir, sachez que pour faciliter la connexion des GPIOs de votre raspberry pi aux différents éléments que vous souhaiterez contrôler, nous avons créé deux hats pour raspberry pi :
- Le UPS Hat V1.0, pour les robots compacts tournant sur des batteries 1S comme le robot Minus ( compatible uniquement batterie 1S ) disposant des fonctionnalités de chargeur, d'alimentation et de jauge de batteries en I2C.
- La vigiboard Hat, qui est un peu plus générique, utilisable avec n'importe quel type de batterie mais ne présentant pas les fonctions avancées propres à l'utilisation d'une batterie 1S ( Pas de chargeur, pas de jauge, pas de convertisseur de tension) . Il faudra brancher tout ce dont vous aurez besoin dessus.
N'hésitez pas à jeter un oeil à leur documentations respective qui expliquent comment ils fonctionnent et comment les mettre sur votre pi:
=> Documentation UPS HAT
=> Documentation Vigiboard HAT












![[Guide] How to use DECTalk, the Moonbase Alpha Voice, on your robot - dernier message par firened](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-16821.jpg?_r=1639321316)





