


Notice permettant d'assembler la pince du Robot Minus
Présenté par : Vigibot & Robot Maker

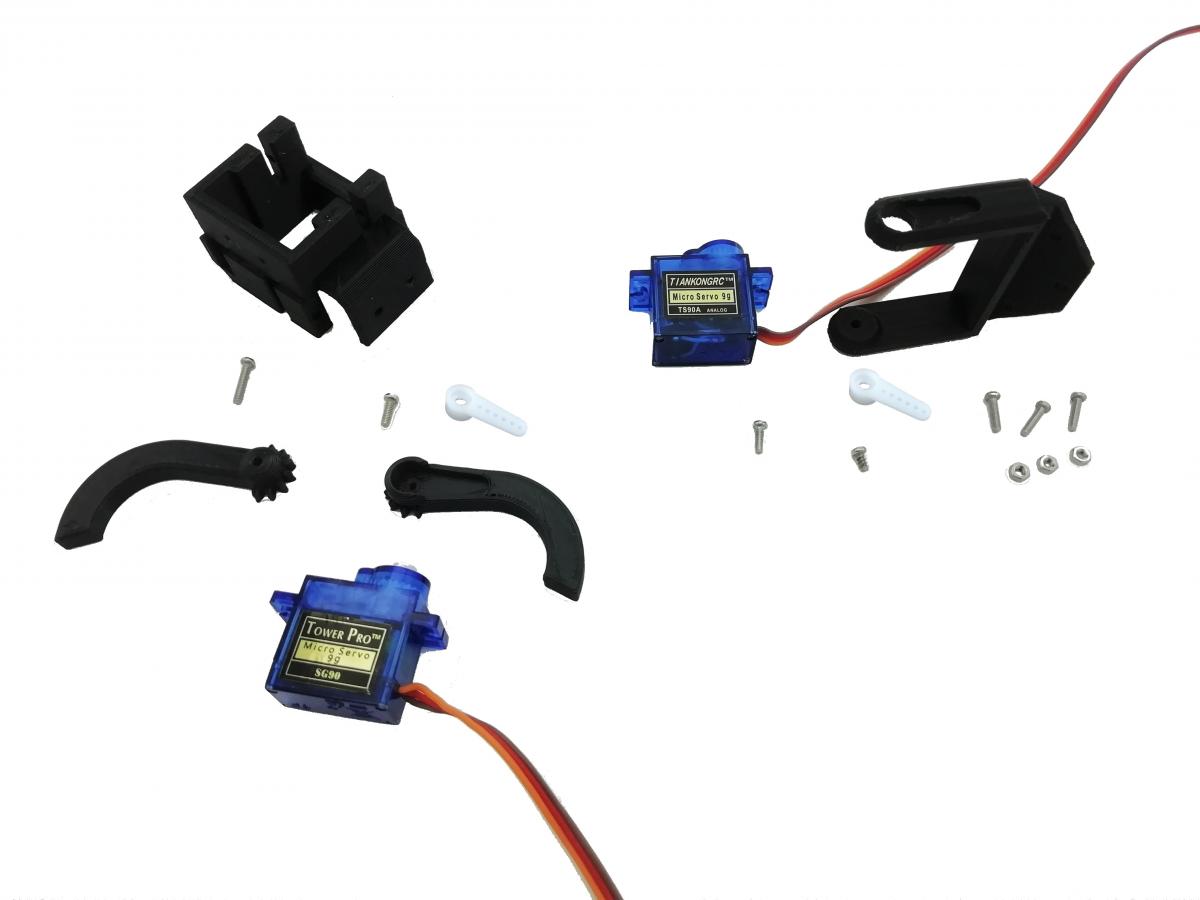
1 : Matériel
Servomoteur 180° : 2
Kit mécanique Pince Minus : 1
Contenu du kit :
- Pièce imprimées en 3D : 4
- Vis M2 longueur 5 à 6mm : 1
- Vis M2 longueur 8mm : 3
- Vis M2 longueur 10mm : 1
- Vis M2 longueur 14 : 5
- Ecrous M2 : 3

Vue d'ensemble :
Pour vous faciliter la tâche vous aurez besoin d'une raspberry pi avec une carte SD vigibot installée et connectée sur un compte de robot avec une configuration par défaut équipée d'un hat facilitant les connexions des servomoteurs.
Optionnel :
Vigibot hat
2 : Montage
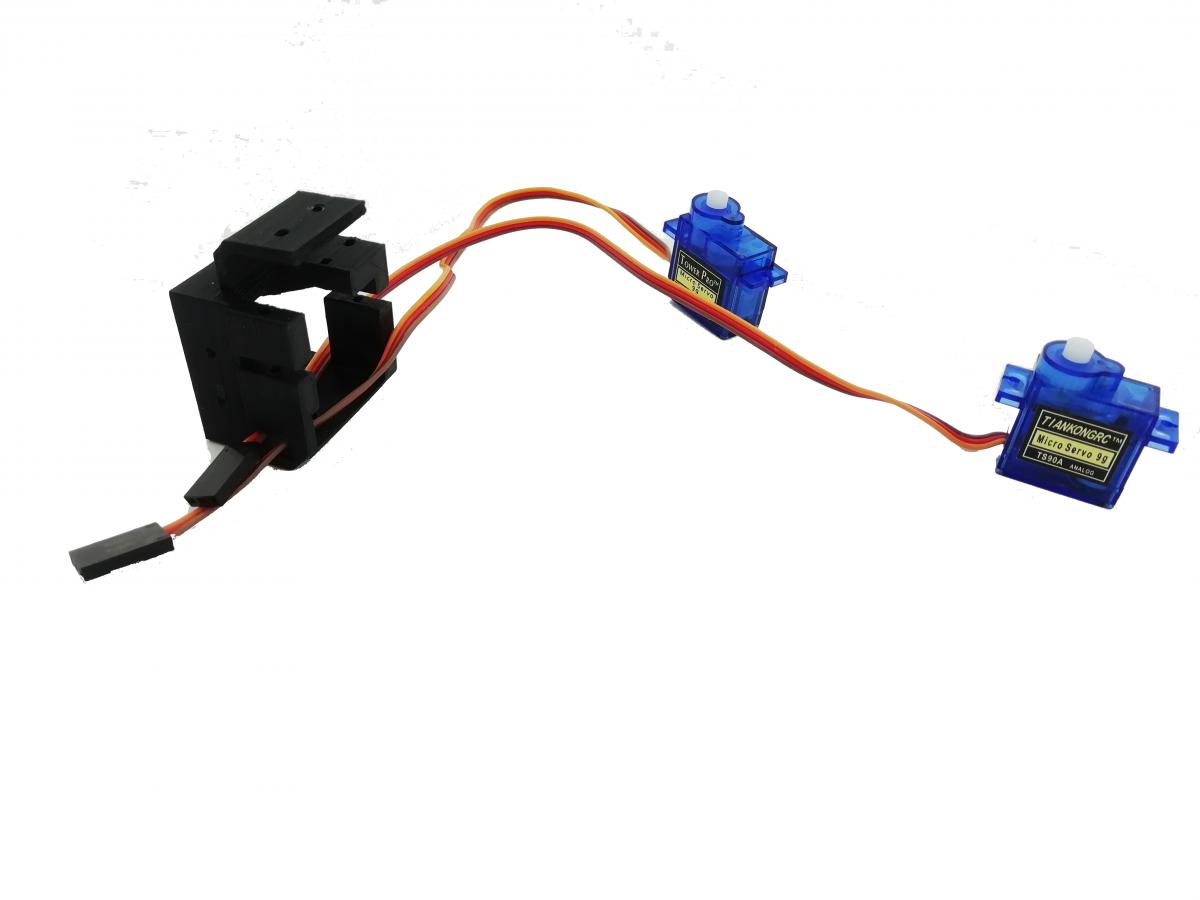
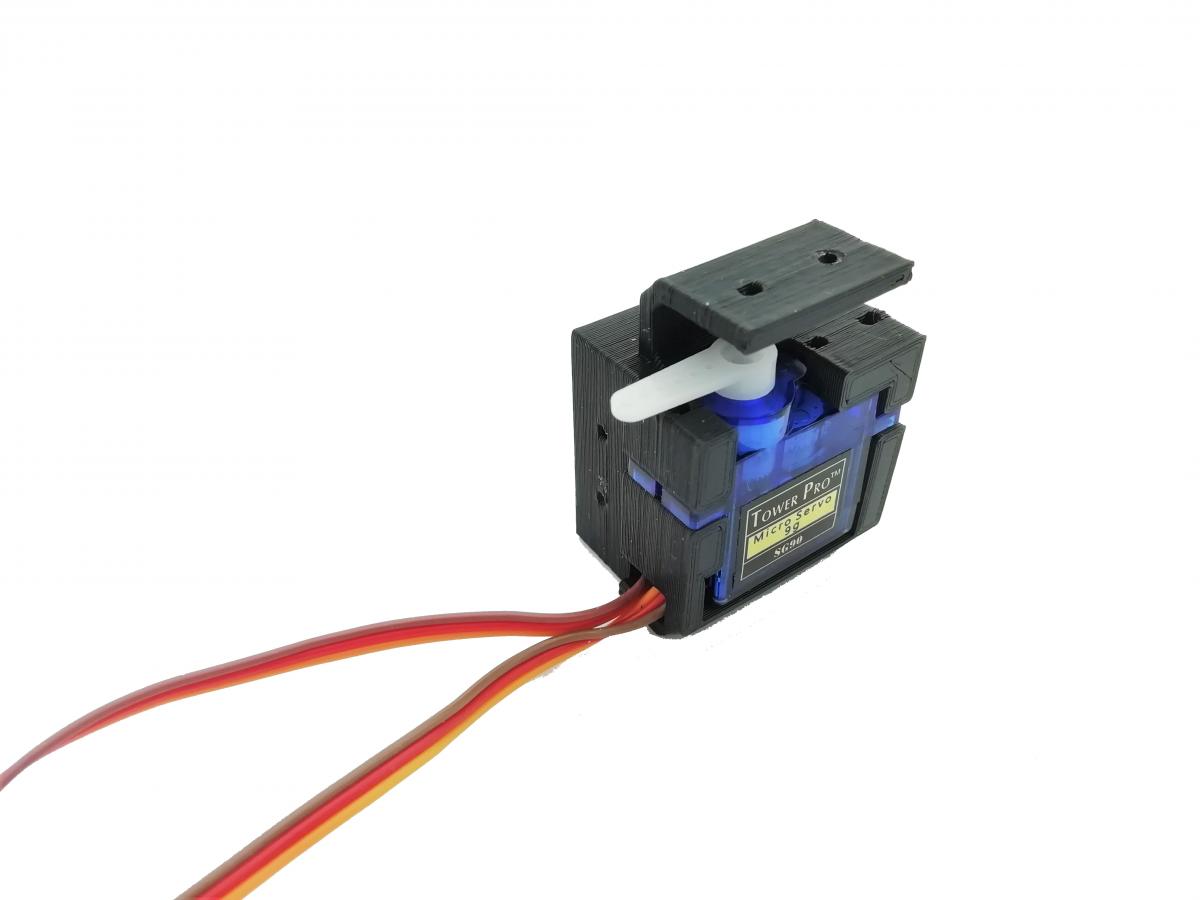
Insérer les 2 palonniers dans les empreintes prévues à cet effet sur les pièces imprimées en 3D de la pince et positionnez les sur les servomoteurs .
Branchez le servomoteur permettant de fermer et d'ouvrir la pince sur le pin 7 de votre raspberry pi configurée par défaut.
Branchez le servomoteur permettant de monter et descendre la pince sur le pin 8 de votre raspberry pi configurée par défaut.
Bouger les servomoteurs via Vigibot et ajuster la position des palonnier sur les servomoteurs jusqu'à ce que le débattement soit le plus parfait possible. ( Les éventuels défaut angulaire inférieurs à un cran de position de palonnier pourront être corrigé plus tard sur le site. )
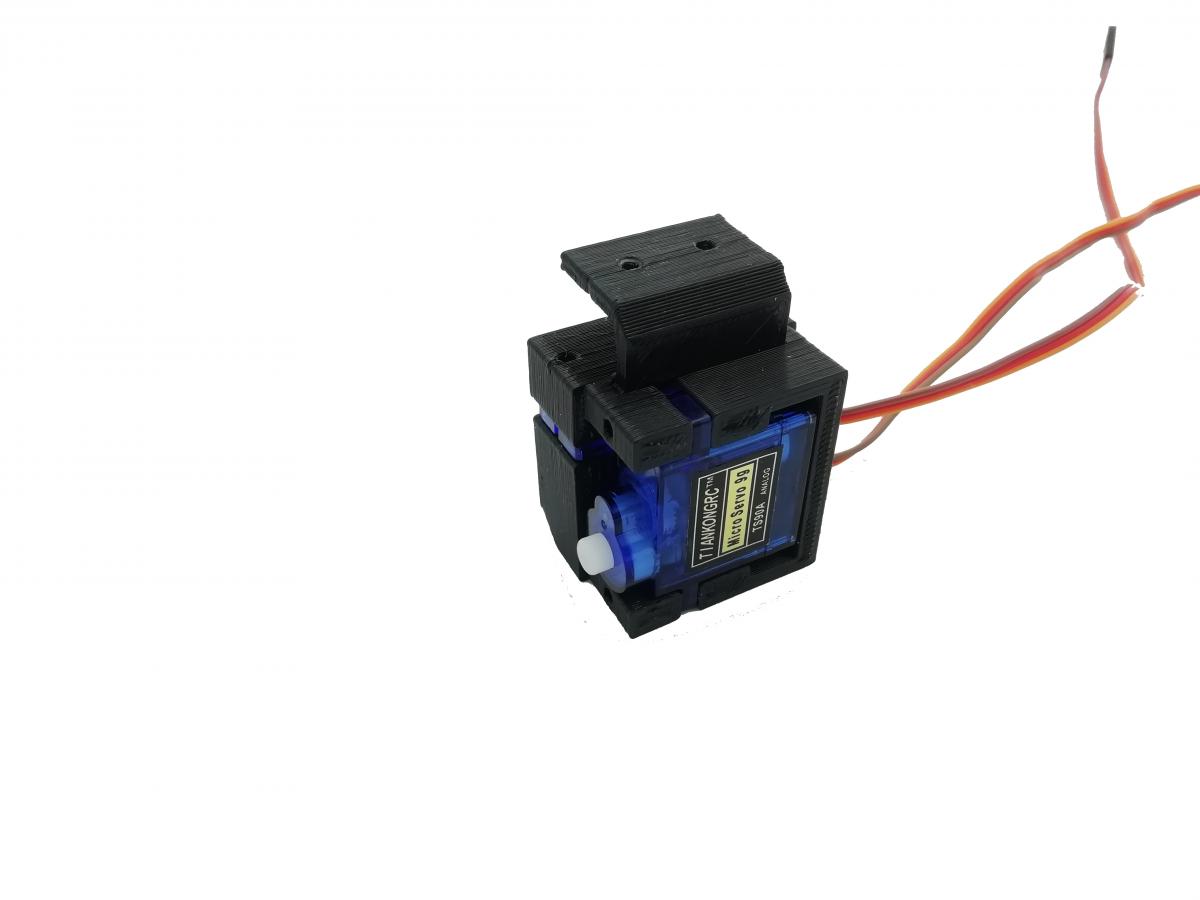
Une fois satisfait, insérez les servomoteurs dans le corps de la pince dans les espaces prévus à cet effet en ayant préalablement fait passer les câbles des servomoteurs dans les trous et rainures qui sont prévus à cet effet.
Note : pour le servomoteur permettant le mouvement haut bas de la pince, les deux positions sont possibles. Choisissez celle qui vous convient le mieux en fonction de si vous voulez une pince un peu plus basse ou un peu plus haute.
N'hésitez pas à essayer les deux positions
Une fois que la pince est complètement assemblée, n'hésitez pas à vérifier une dernière fois que vous êtes satisfait de l'ajustement des palonniers en fonction des courses des servomoteurs en essayant via vigibot.
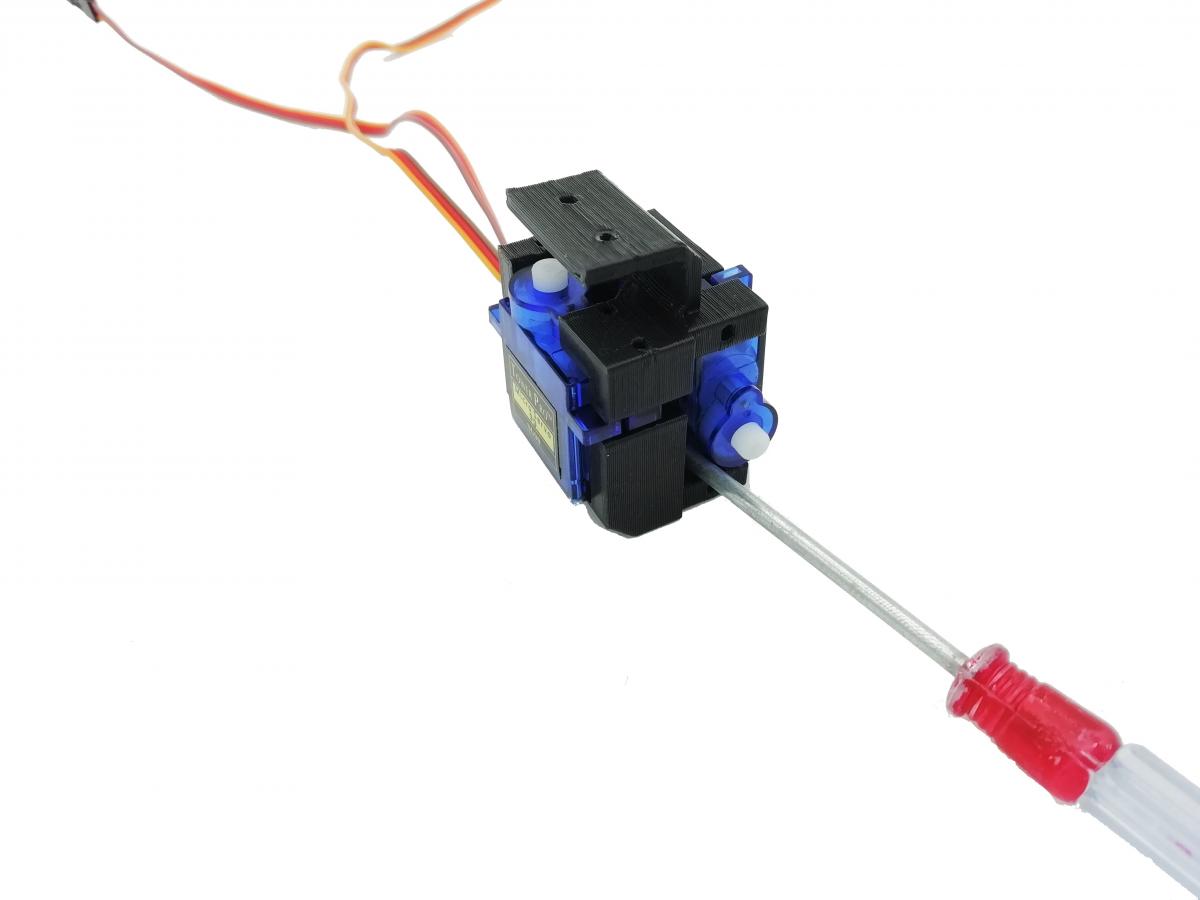
Une fois l'ultime vérification terminée,
Fixez les deux servomoteurs sur le corps de la pince avec les vis 14mm.
Fixez le palonnier du U avec la vis fournie avec le servomoteur prévue à cet effet.
Fixez le contre axe du U avec la vis de 6mm.
Vissez la vis de 10mm pour maintenir le doigt de la pince sur le servomoteur d'ouverture et de fermeture de la pince.
Insérer le deuxième doigt de la pince de la pince de sorte à ce qu'ils soient symétrique symétrique avec le premier doigts.
Fixez ce doigt avec la dernière vis longueur 14mm.
Il vous restera 3 vis longueur 8mm et 3 écrous pour fixer le plat du U sur le châssis de votre robot.
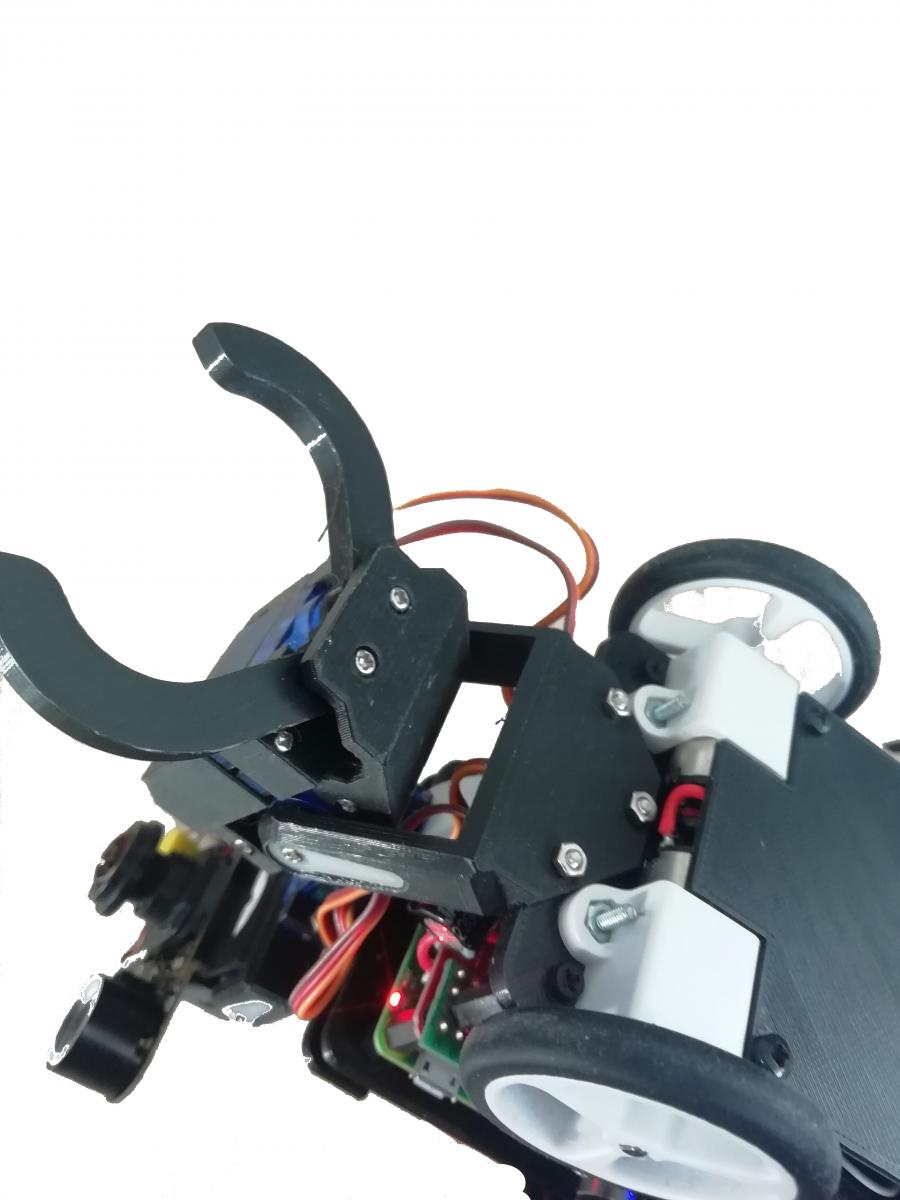
Quelques photos :
















![[Guide] How to use DECTalk, the Moonbase Alpha Voice, on your robot - dernier message par firened](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-16821.jpg?_r=1639321316)





