


Notice de L'UPS HAT Vigibot V1.0
Présenté par : Vigibot & Robot Maker

Lien du produit : UPS Board Hat V1.0
Table des matières
1 : Contenu du kit
2 : Présentation du UPS HAT
3 : Souder les éléments sur le UPS HAT
4 : Note concernant l’utilisation du jumper et des ponts de soudure de J1 J2 et J3 .
5 : Assemblage de L'UPS hat sur la raspberry pi.
6 : Hack de l'UPS : Ajout d'un interrupteur sur l'UPS V1.0
1 : Contenu du kit
- PCB UPS HAT * 1
- Condensateur chimique 2200µF * 1
- Condensateur céramique 2.2µF * 1
- Connecteur 2x20 pour Raspberry pi avec ses 3 extensions * 1
- Barrette sécable 40 pins noir * 3
- Visserie nylon M2.5 L6 * 4
- Ecrou M2.5 * 4
- Rondelle M2.5 * 4
- Entretoise M2.5 mâle femelle L12 * 4
- Jumper * 1
- Module Step up * 1 ( rouge)
- Module charge * 1 ( avec la prise USB C)
- Jauge de batterie * 1 ( PCB miniature au format dip 6)
2 : Présentation du UPS hat
Le UPS hat est un hat Raspberry pi permettant de
=> Fournir une alimentation 5V 3A à votre raspberry pi à partir d'une batterie lithium 1S ( non compatible avec les batteries 2S ou plus ... )
=> Charger votre batterie sans couper l'alimentation de votre raspberry pi ( continuez d'utiliser votre robot même quand il est en charge! )
=> Indiquer le niveau de charge de votre batterie
=> Raccorder aisément différent éléments extérieurs (tel que capteurs, servomoteurs, alimentations…) aux GPIO d’un Raspberry Pi.
L'UPS Hat se positionne directement sur le Raspberry pi et est livré en kit à souder soi-même avec des barrettes sécables à couper.
Savoir souder et avoir le matériel pour le faire est donc requis pour assembler les éléments du kit (barrettes sécables, condensateurs) sur la carte.
Comme la vigiboard hat, deux rails d’alimentation en prises pour servomoteurs sont présents. Ils sont par défaut indépendants.
Vous pouvez y brancher la source d’alimentation que vous souhaitez.
Veillez néanmoins à ne pas brancher deux sources différentes sur un même rail…
Une prise est dédiée à la batterie, et quelques options sont " configurable : J1 J2 J3 et la position du Jumper ".
Attention :
Les pins identifiés 3V et 5V sont respectivement directement reliées aux pins 3.3V et 5V du Raspberry pi. Il convient donc de prendre les précautions nécessaires concernant le courant consommé et les perturbations possibles apportées par les éléments connectés. On peut y connecter des capteurs peu gourmands mais on évitera, par exemple, de raccorder plusieurs servomoteurs sur le 5V du Raspberry pi…
Note :
Certains GPIO sont spécifiques à des fonctions, si vous utilisez celles-ci, les GPIO concernés ne sont plus disponibles à un autre usage.
L’I2C utilise le GPIO 2 (SDA) et le GPIO 3 (SCL).
Vous ne pouvez donc pas utiliser les GPIO 2 et 3 pour autre choses quand vous utilisez l’I2C.
L’UART utilise le GPIO 14 (TX) et le GPIO 15 (RX).
Vous ne pouvez pas utiliser les GPIO 14 et 15 pour autre chose quand vous utilisez l’UART.
3 : Souder les éléments sur le UPS hat
Voilà à quoi doit ressembler l'UPS Hat une fois soudé :
UPS hat soudé de manière classique avec que des barrettes sécables noires vue de devant et de derrière avec et sans composants:
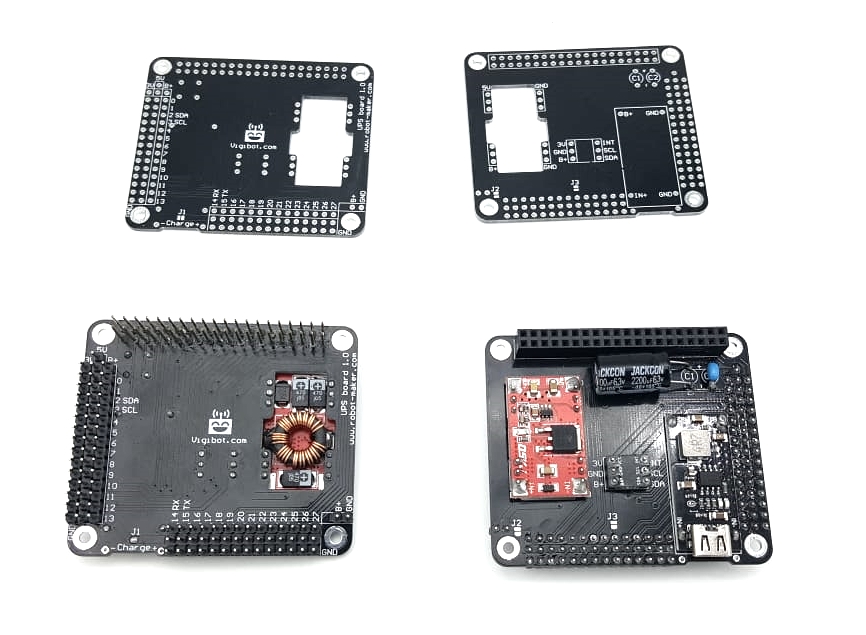
Utilisez bien ces images comme modèle pour éviter les erreurs.
Conseils pour souder les composants :
1) Découpez vos barrettes sécables aux bonnes dimensions à l’aide d’une pince coupante fine ou cassez la barrette à l’aide de deux pinces plates, pour le faire précisément au bon endroit.
Nous avons fourni suffisamment de barrettes sécables noires (3 de chaque) à couper pour que vous puissiez souder la totalité des connecteurs du hat.
Proposition de découpage pour un assemblage avec barrettes de même couleur :
Barrette 1 : 16 + 15 + 3 + 3 + 3
Barrette 2 : 15 + 14 + 3 + 3 + 3 + 2
Barrette 3 : 14 + 14 + 1 + 1 + 1 + 1 (reste 8)
2) Soudez d’abord les barrettes sécables les plus longues et le connecteur de deux pins pour la batterie. ( longueur 14 * 3 , 15 * 2 , 16 * 1 et 2 * 1 )
Attention à les mettre du bon côté du PCB ) regardez bien l'image ci dessus.
Note : Lorsque vous soudez les barrettes soudez d’abord les deux pins des extrémités et vérifiez que la barrette est parfaitement bien en place avant de souder tous les autres pins. Ainsi il sera plus facile de corriger un éventuel défaut de positionnement.
Si vous en avez vous pouvez vous aider d'une véroboard pour souder plus facilement les barrettes.
3) Soudez la jauge de batterie et le step up ( attention là aussi au côté où vous les mettez... )
Pour cela je recommande de commencer par souder les six barrettes de longueur 3 sur le PCB, (de l'autre côté que celui sur lequel vous vennez de souder les barrettes les plus longues ) , Puis de positionner la batterie et le step up, et de bien les plaquer contre le plastique noir des barrettes en soudant.
4) Soudez le chargeur.
Là encore je recommande de commencer par souder les barrettes (4 pins seuls cette fois ci ) sur le PCB. Par contre cette fois ci, après avoir souder les pins, (et avant de souder le chargeur ), retirer le plastique noir des connecteur. En effet le chargeur doit être soudé plaqué au PCB.
5) Soudez le connecteur 2*20.
Attention, les connecteurs 2*20 sont livrées avec 3 espaceurs montés sur le connecteur, il vous faut délicatement les retirer avant de souder le connecteur.
Attention aussi à bien souder le connecteur dans le bon sens... N'hésitez pas à vérifier à plusieurs reprises ...
Une fois soudé, vous pouvez remettre les espaceurs sur le connecteur, cela protégera les pins du connecteur.
6) Soudez les deux condensateurs en dernier.
Attention, le condensateur chimique est un composant polarisé, il est important de le souder dans le bon sens. La patte - est indiquée sur le condensateur et sur le PCB.
4 : Note concernant l’utilisation du jumper et des ponts de soudure J1 J2 et J3
Par défaut les deux rails d’alimentations des deux groupes de connecteurs pour servomoteurs sont reliés à rien. A vous de choisir sur quoi vous aller les relier.
Un sélecteur de voltage permet de relier le rail 1 à la tension d’alimentation V+ ( batterie) ou bien au 5V ou au 3.3V du Raspberry pi grâce au jumper.
J1 permet de relier ou non les deux rails d'alimentation 1 et 2 en faisant un point de soudure.
J2 permet de relier les rail d'alimentation 2 directement à la batterie ..
J3 permet de relier la jauge de batterie au pin 19 de la raspberry pi pour une évolution future.
Attention : Ne jamais relier deux tensions d’alimentation différentes ensembles …
Sinon vous pouvez endommager de manière irrémédiable votre Raspberry pi.
Evitez donc de relier V1 à V+ et au 5V en même temps !
De même évitez relier V2 à V+ et 3.3V en même temps !
Par défaut nous recommandons de souder J1 et de ne pas souder J2 et J3, c'est ce que nous faisons sur les kits livrés soudé.
Récapitulatif :
J1 soudé, J2 non soudé => Les deux rails sont connectés ensemble, vous pouvez utiliser le jumper pour définir l'alimentation sur les deux rails.
J1 & J2 tous les deux soudé => les deux rails sont connectés ensemble à V+ => Ne pas utiliser le jumper dans ce cas.
J1 non soudé et J2 soudé => Les deux rails sont séparé, vous pouvez utilisez le jumper pour définir le voltage sur le rail 1, le rail 2 est connecté à V+.
J3 non soudé => fonction de coupure automatique de la raspberry pi en cas de batterie trop faible, disponible pour plus tard pour nouvelles fonctionnalités.
Faites votre choix : Soudez les ponts de soudures que vous souhaitez utilisez et positionnez votre jumper.
5 : Assemblage de L'UPS sur la raspberry pi :
Note : Cet assemblage se fait avec la raspberry non allumée, et la batterie non branchée à l'UPS.
Si ce n'est pas déjà fait, insérez la nappe de la camera de la raspberry pi dans le slot prévu à cet effet sur la raspberry pi. ( La camera n'a pas besoin d'être montée à l'autre bout pour le moment ) c'est juste que vous ne pourrez plus insérer la nappe de la caméra sans démontage lorsque vous aurez monté l'UPS sur la raspberry pi. Donc vérifiez bien deux fois, que la nappe est bien sécurisée dans son connecteur et qu'elle est bien dans le bon sens.
Ensuite il vous faudra Il faut utiliser la visserie Nylon M2.5 suivante :
rondelles, entretoises de 12mm , vis longueur 6mm et écrous, 4 de chaque.
Note : si vous avez un kit châssis minus vous pouvez gagner un peu de temps et commencer à assemble le châssis et utiliser :
=> Les entretoises de male 5mm qui remplacent les vis de longueur 6mm et les entretoises de 25mm qui remplacent les écrous.
L'ordre de montage est le suivant :
vis de 6mm ( ou entretoise 5mm ) => Raspberry pi => rondelle => Entretoise 12 mm => UPS hat => Ecrous ( ou entretoises 25mm)
Photo :
Vous pouvez maintenant brancher votre batterie et si elle est suffisamment chargée votre raspberry pi devrait se lancer et le robot se connecter rapidement à vigibot.
6: Conditions d'utilisations de l'UPS V1.0
Attention : l'UPS n'a pas pour fonction de protéger votre batterie contre une décharge profonde, veillez donc à toujours utiliser une batterie 1S équipé d'un BMS (ou équipez votre robot d'une alarme de décharge sinon votre robot pompera toute sa batterie jusqu'à la mort de de cette dernière ... Dans ce cas il est de votre responsabilité de remettre en charge votre robot avant que ce dernier n'ai plus de batterie. )
Lorsque vous remettez votre robot en charge vérifiez qu'il est bien connecté et qu'il charge correctement ( le niveau de batterie et le voltage doivent monter progressivement de manière "visible " ... ) Il se peut que l'aiment ne se mette pas en position correctement,et que votre robot ne charge pas assez ... En cas de doute débranchez le du chargeur et rebranchez le. Il serait dommage de laisser son robot épuiser sa batterie sur son chargeur par ce qu'il est mal branché!
De manière générale il est fortement déconseillé de laisser son robot s'éteindre à cause d'une batterie trop faible. ( ce n'est pas bon pour votre carte SD ) . De plus, si votre batterie n'est pas suffisamment chargée, votre robot n'arrivera malheureusement pas à démarrer même en le mettant sur son chargeur et il faudra alors effectuer une opération supplémentaire :
Plusieurs possibilités s'offrent à vous :
a ) Option la plus rapide en terme de temps de charge : charger la batterie seule sur un chargeur externe adapté aux batteries 1S.
Si vous n'avez pas de chargeur ivous pouvez séparer l'UPS de la raspberry pi le temps de laisser suffisamment la batterie se charger.
b ) alimenter la raspberry par sa prise USB en 5V attendre que le robot démarre, mettre le chargeur en place, attendre environ 25 min. Au bout de 25 min de charge la batterie devrait avoir suffisamment chargée pour reprendre le relais. Vous pourrez débrancher l'alimentation de la prise USB sur le raspberry pi. ( Note : si la jauge de batterie continue d'indiquer 0% procéder à un reboot sur l'interface Vigibot ) .
Si vous laisser votre robot épuiser toute sa batterie et qu'il s'éteint vous devrez faire l'une de ces deux opération pour le refaire démarrer.
Evitez donc de laisser mourir votre robot, pour rappel ce n'est pas bon pour votre carte SD, et vous aurez cette opération à faire pour le rallumer ...
Attention, il est nécessaire de régler correctement votre robot pour éviter qu'il ne consomme trop en veille...
=> Veillez à régler vos servomoteurs ( Pince / bras latéraux ) afin qu'il ne forcent pas. ( Après avoir réglé au mieux d'un point de vu mécanique manuellement la position du palonnier sur le servomoteur, il est possible d'ajuster encore un peu mieux sur l'interface vigibot )
=> Veillez à régler les potentiomètres de vos leds Infrarouges de sorte à ce que les leds éclairent au minimum, ou bien ajouter un fil ( à souder sur la patte intérieur de la photorésistance des leds ) de sorte à pouvoir piloter vos leds depuis l'interface vigibot ( Grosse économie d'énergie )
=> Si possible mettez votre robot à un endroit où la connexion wifi est correcte ... ( Il sera d'autant plus agréable à piloter ... )
En cas de surconsommation en veille, la décharge parasite va provoquer la mise en sécurité du chargeur ... Une led verte s'allumera de manière fixe sur le circuit de charge sur L'UPS et ce dernier arrêtera de charger ... Seule option dans ce cas, débrancher le câble magnétique et le rebrancher pour que la charge reprenne...
7 : Hack de l'UPS V1.0 : Ajout d'un interrupteur sur l'UPS
Le robot étant prévu pour un usage H24, il n'était pas prévu de lui mettre un interrupteur, mais cela ayant été demandé par les utilisateurs nous proposons le hack suivant permettant d'ajouter un interrupteur pour éteindre le robot tout en permettant la charge de ce dernier, facilitant ainsi la "résurrection d'un robot" qui serait arrivé à court de batterie.
Pour ceux qui le souhaite il faut donc exécuter l'opération suivante ( vu avec et sans les composants )
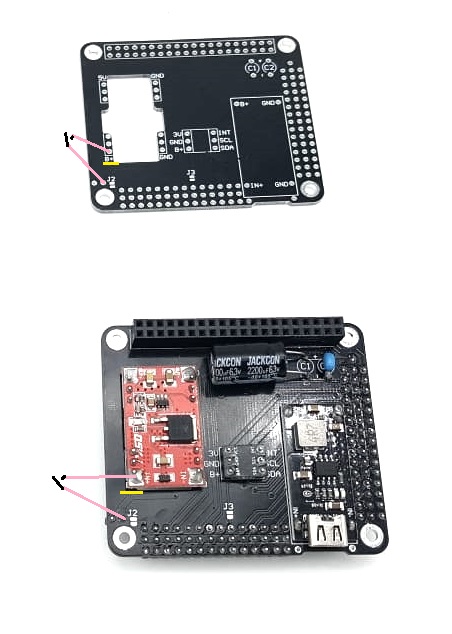
En jaune une coupure de piste.
En rose deux fils conduisant à un interrupteur.
Attention, dans ce cas choisissez un interrupteur capable de supporter 3A.
Attention, l'ajout d'un interrupteur n'empêche pas la nécessité de d'abord couper le robot depuis l'interface vigibot.
Notes :
Nous réfléchissons à une prochaine version de l'UPS intégrant de quoi mettre cet interrupteur plus facilement par la suite et de quoi diminuer les potentiels problème de charge parasite.













![[Guide] How to use DECTalk, the Moonbase Alpha Voice, on your robot - dernier message par firened](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-16821.jpg?_r=1639321316)





