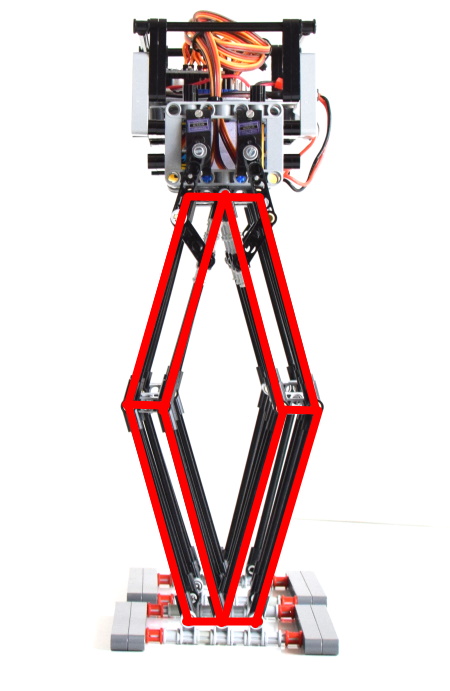

J'ai imaginé ce bipède, LightFoot, bien avant la version flexible, https://www.robot-ma...-mon-biped2021/. Il m'a été inspiré par le bipède de DisneyResearch que l'on peut voir ici, https://www.robot-maker.com/forum/topic/13343-mon-biped2021/?p=113128 Je propose une autre vidéo, plus bas, qui montre bien le mécanisme.
Chaque couple fémur/tibia est indépendant, mais sur le mien pour faire le mouvement gauche/droite du pied (à 2'10"), il est possible que cela provoque une distorsion de l'alignement du couple fémur/tibia. C'est pour cette raison que j'avais envisagé une version flexible.
L'autre grande différence est que mon bipède a 4 servos par patte, contre 6 pour celui de Disney. Ce n'est donc pas comparable.
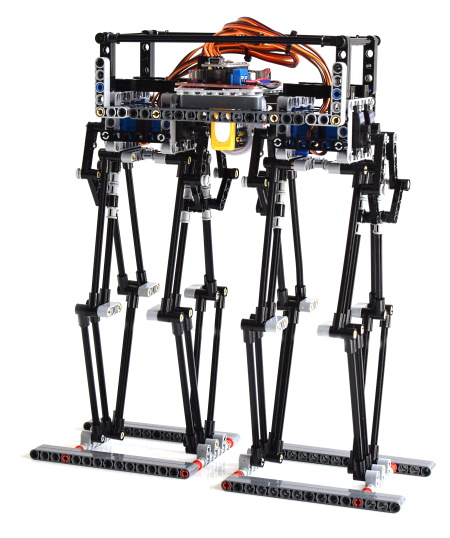
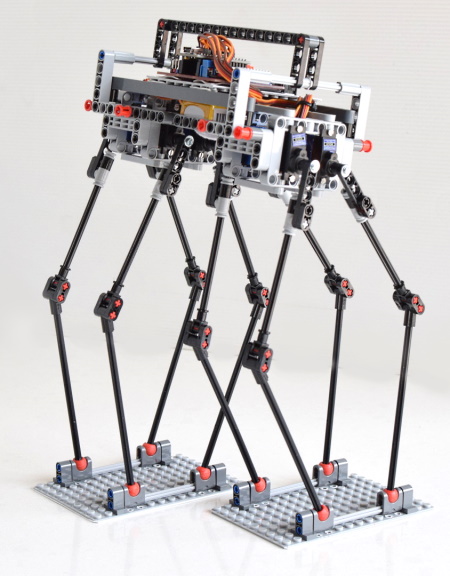
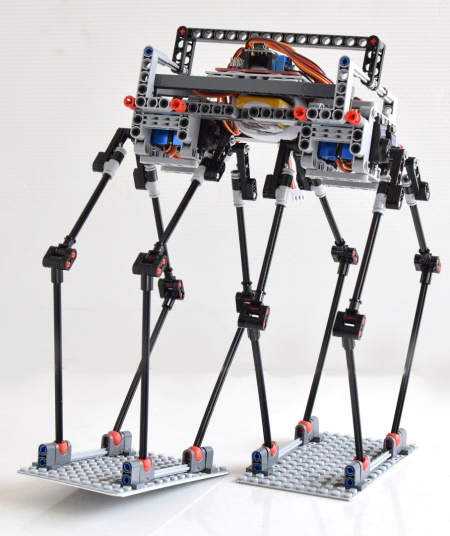
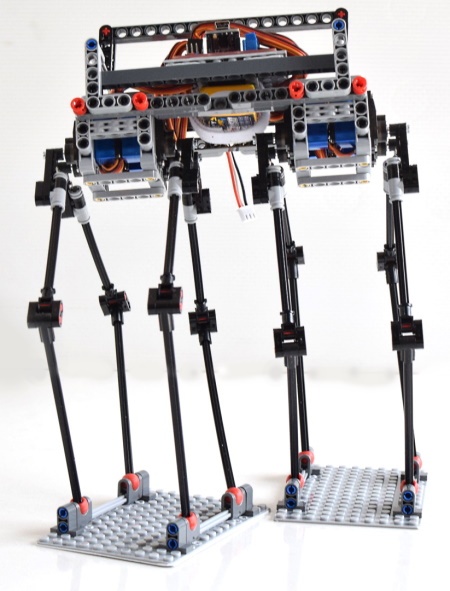
Sur les 4 photos du bas, je montre mon bipède en situation avec des positions qui montrent ses capacités. Attention, c'est du statique et non le résultat du code.
Caractéristiques:
- poids total 415g
- hauteur 32cm
- 8 servos MG92B
- batterie 2S, 850mA, 43g
- Arduino Nano
Ya + K