Merci, Sandro, pour cette très longue et très intéressante réponse. J'ai quand même un peu honte de voir que tu es éveillé, tard dans la nuit, à cause de mon ignorance.
Pas de problème, la question m’intéressait aussi (je m'étais jamais posé la question du passage à l'échelle d'un robot sur pattes, et pourtant j'ai eut tout un cours dessus)
- le poids des servos et de la batterie cumulés est d'environ 1kg. Considérant que mon robot fait environ 2kg, oui effectivement, on est à 50%.Mais attention, le poids d'une partie de la structure est dû à la taille nécessaire pour monter des escaliers, ce qui est mon objectif, alors que l'autre partie est dû à la rigidification obligatoire, en raison du poids des servos.
Donc on a déjà une bonne partie du poids en servos et batterie : on ne pourra donc je penses pas faire beaucoup plus gros juste en augmentant la taille des composants (et encore, d'après tes tests, ils semblerait que les servos soient sous-dimensionnés)
- faire une réduction de la vitesse du servo pour augmenter le couple est tout à fait envisageable, mais c'est exactement ce qui est fait par les fabricants dans leurs séries de servos. Voici un lien qui montre plusieurs séries de servos basées sur les différentes tensions ou les différentes motorisations. http://www.spt-servo.com/ Autant, utiliser le servo qui est le plus proche de sa convenance.
En effet, le mieux est de choisir directement un servo avec plus de réduction intégré (donc plus de couple et moins de vitesse, pour une puissance identique). Juste prendre un servo "plus puissant" n'est pas forcément intéressant car il sera aussi plus lourd. Sur ton lien, tu trouves certains servos avec exactement le même poids, l'un avec plus de couple, et l'autre avec plus de vitesse. Ajouter une réduction externe (comme dans la première vidéo) est possible (par exemple si tu ne trouves pas de servo avec une réduction suffisente), mais c'est plus complexe etça rajoute du poids. Par contre, ça évite de rachetter des servos quand tu veux changer de réduction.
- ton idée d'élastique entre les "genoux" du losange est très intéressante, mais je me demande si cela ne va pas nécessiter une augmentation du couple des servos. Je vais faire le test, je veux en avoir le cœur net !
Supposons un robot qui lève à peine la patte (donc où la longeur de l'élastique et la forme du losange ne varient pas beaucoup), ça nous simplifiera le raisonnement.
Supposons qu'on lève verticalement la patte.
Disons que sans élastique, chaque servo fournit un couple C1=10 kg.cm quand le robot est en poids sur la patte. Les servos ne doivent fournir presque aucun effort quand la patte est en l'air (si la patte est de poids négligeable par rapport au poid du robot)
Si maintenant on ajoute un élastique ou un ressort qui quand la patte est en appuit supporte 50% du poids du "quart de robot" porté par la patte. Alors quand la patte est en appuit au sol, les servos on moitié moins de poids à porter, donc ils ont besoin de moitié moins de couple, soit C2=C1/2=5 kg.cm.
Quand la patte est en l'air, les servos devront en revanche luter contre l'élastique, qui représentait un couple négatif de 5kg.cm : les servos doivent donc fournir un couple C3=- 5kg.cm (=-C2)
Donc au lieu d'avoir un servo qui doit fournir parfois 10kg.cm et parfois presque rien, tu as un servo qui devra fournir la plupart du temps 5kg.cm, dans une dirrection ou dans l'autre. Tu ne forcera donc peut-être pasbeaucoup moins "en moyenne", mais tu peux prendre un servo donné pour 5kg.cm au lieu de 10 kg.cm (donc un servo 2 fois moins lourd).
En pratique, c'est un peu plus complexe que ça :
- la longueur de l'élastique change selon la position de la patte, ainsi que les angles, donc le couple exercé n'est pas constant
- selon la position de la patte, le couple nécessaire pour soutenir le poids du robot change
- parfois le poids du robot est sur 4 pattes, parfois sur 3 (donc parfois il faudrait soutenit 50% du tiers au lieu de 50% du quart du poids du robot)
- il y a un mouvement avant-arrière de la patte en plus du haut-bas
- il y a aussi la question de la consommation de courant, qui détermine la taille de la batterie (vu qu'une patte passe plus que la moitié du temps au sol, de ce point de vue il vaudrait mieux soutenir de l'ordre de 75% du poids, mais du coup on gagne moins sur le poids des servos)
- les pattes ont une masse, donc il y a un couple à fournir pour les soulever et pour les accélérer
Donc je penses que l'élastique optimal devrait soutenir entre 33 et 66% du poids (d'un quart de robot).
A ta place, je commencerais vers 50% (contrairement au 100% que je suggérais dans mon post précédent, qui est bien pour minimiser la consommation d'énergie sur un robot principalement debout mais immobile, mais pas optimal pour réduire la taille des servos sur un robot principalement en mouvement)
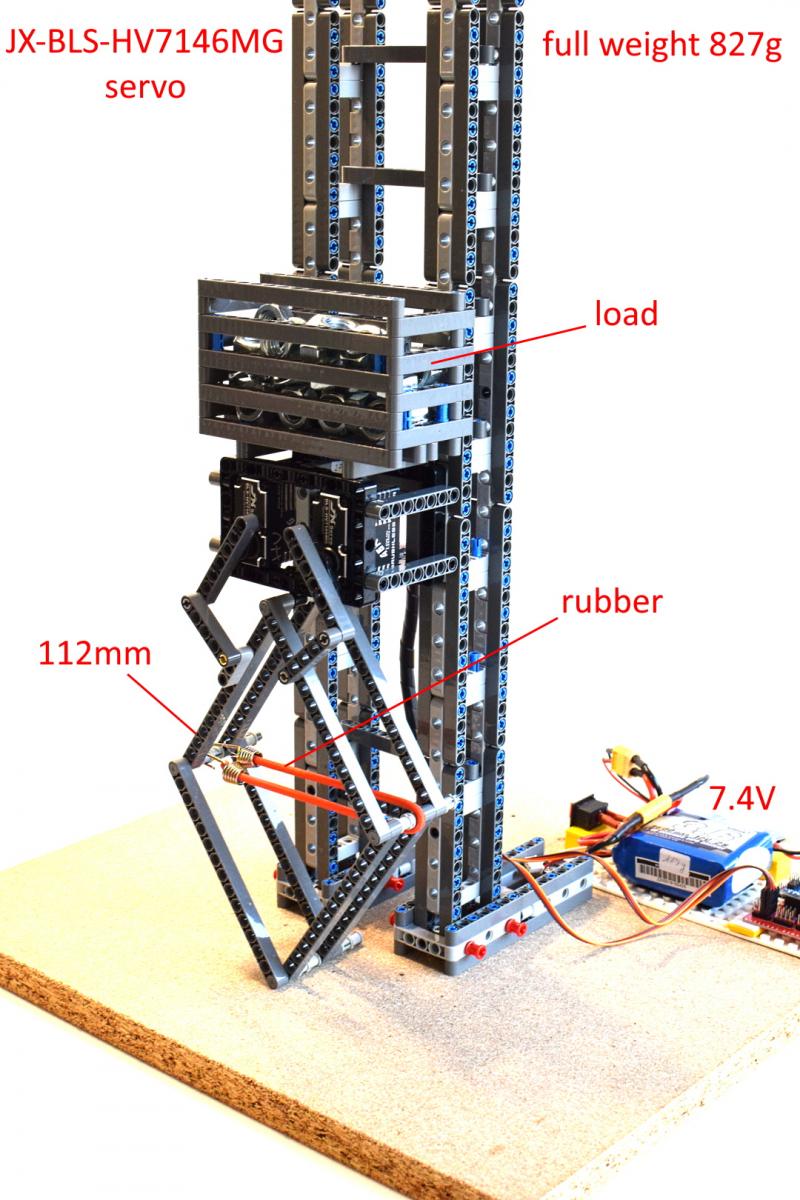
- il ne m'a pas semblé que tu ais évoqué la possibilité d'augmenter le couple par l'augmentation de la tension. C'est précisément ce que je fais avec les MG92B qui sont prévus pour max 6V. Je les alimente en 7.4V(8.5V, 2S). Je considère ce servo comme étant réellement exceptionnel. C'est grâce à son faible poids, sa vitesse et son prix que mes quadrupèdes fonctionnent. Si je pouvais augmenter la tension de ces servo j'aurais peut-être une partie de la solution.
En soit, pour augmenter le couple, il faut augmenter le courant.
Mais en pratique, si tu augmente la tension, le courant augmente aussi.
C'est un jeu "dangereux" (tu risques de crammer des servos si tu pousse trop loin), mais tu peux y gagner pas mal de couple "gratuitement" (ie sans augmentation du poids des servos, la batterie doit quand même être augmentée en conséquence).
Il y a a ma connaissance 3 modes de destruction possible pour un servo en cas de surtention :
- destruction de l'électronique de contrôle : le circuit intégré qui fait l'asservissement a une tension max, au delà la destruction est assurée et quasi-instantanée. Pour connaitre cette tension, soit tu fais tourner le servo à vide et tu augmente la tension d'alim jusqu'à ce qu'il arrête de fonctionner (tu aura alors détruit le servo), soit tu trouve la référence du/des circuits intégrés contenu dans le servo, et on regarde leur spécifications (nécessite de trouver cette info sur internet, ou de démonter un robot (en état ou HS)).
- destruction du moteur par surchauffe (il me semble qu'en général c'est le verni du bobinage qui cramme, entrainant ensuite un court-circuit ; potentiellement ça peut aussi être une déformation du moteur ou la fusion du cuivre du bobinage). Là, ce qui compte, c'est la puissance thermique, moyennée sur une durée d'une à quelque dizaines de secondes. De quoi vas dépendre la puissance termique, principalement du courant, c'est à dire du couple exercé. Donc en gros, tu peux fournir de très gros couples un court instant (une fraction de seconde) sans le moindre problème, mais il ne faut pas frocer trop trop longtemps. Ce paramètre vas être assez difficile à gérer proprement, premièrement car tu ne contrôle pas directement le servo (il faudrait remplacer l'électronique de contrôle par ta propre électronique de contrôle), et car ça dépend d'à quel point le moteur force.
En pratique :
a) si tu augmente la tension, essaye d'éviter qu'il y ait un moment prolongé où tu forces beaucoup (un instant très court, par exemple un point de rebroussement de la trajectoire, ne devrait pas poser trop de problèmes)
B) essaye d'avoir une trajectoire "réaliste", ie où tu laisse au servo le temps de (presque) atteindre la position cible (en tout cas si tu as un servo "proportionnel", si ton servo est en "tout ou rien", alors peu importe)
c) essaye de "répartir" les besoins en couple, par exemple par l'ajout d'élastiques qui t'aident là où tu as besoin du plus de couple (quitte à lutter contre quand tu as besoin de moins de couple)
d) essaye de bien aérer ton servo pour qu'il refroidisse mieux
- destruction du moteur par arcs-électriques : à priori, avec un servo moteur, je penses que tu aura crammé l'électronique de contrôle bien avant : en gros, il s'agirait d'un court pic de tension suffisent pour créer un arc électrique à travers le verni du bobinage et ainsi y faire un trou. Mais les tensions nécessaires sont très élevées.
Voici 2 vidéos qui montrent que, néanmoins, un grand quadrupède est réalisable. Les servos utilisés sont dans la gamme des 25kg.cm à 50kg.cm ce qui est acceptable pour moi. Bizarrement, le mécanisme utilisé est un mécanisme série et non pas parallèle (5 barres), ce qui à mon avis est une erreur. Mais bon, ça fonctionne.
Les deux variantes coexistent, chacune avec leurs avantages et inconvéniants :
Mécanismes parallèles :
+ : plus rigide
+ : moteurs dans le tronc : pattes plus légères (->moins d'inertie)
+ : moteurs dans le tronc : pas de cables dans les pattes
- : structure plus complexe (poids suplémentaire)
- : équations plus complexes
- : contrôle plus complexe (si on veut faire un controle "mathématique", simplement du fait que les équations de cinématique et de dynamique sont plus complexes)
- : surface de travail plus restrainte
Mécanismes série :
+ : plus "simple" (surtout si on doit concevoir les pièces au lieu d'utiliser des légos)
+ : équations plus simples
+ : contrôle plus simple
+ : inspiration plus facile du monde du vivant
+ : espace de travail maximisé pour un encombrement minimisé
- : moteur dans les pattes : poids des pattes (inertie, poids à soulever pour lever la patte)
- : moteur dans les pattes : cables devant descendre dans les pattes
Par exemple, pour un bras robotique (en gros l'équivalent d'une patte), on choisira plutôt un robot delta (parallèle) pour de petits déplacements rapides et précis (par exemple pour mettre des chocolats dans leur boite) et plutôt un bras série pour des taches où on veut un espace de travail important (par exemple un bras qui soit visser des vis à plusieurs endroits différents d'une voiture, ou qui doit faire la peinture).
Pour les robots à jambe, honnêtement, je n'ai pas assez creusé la question pour pouvoir affirmer des généralités sur quel type de mécanisme est mieux pour quel type de robot