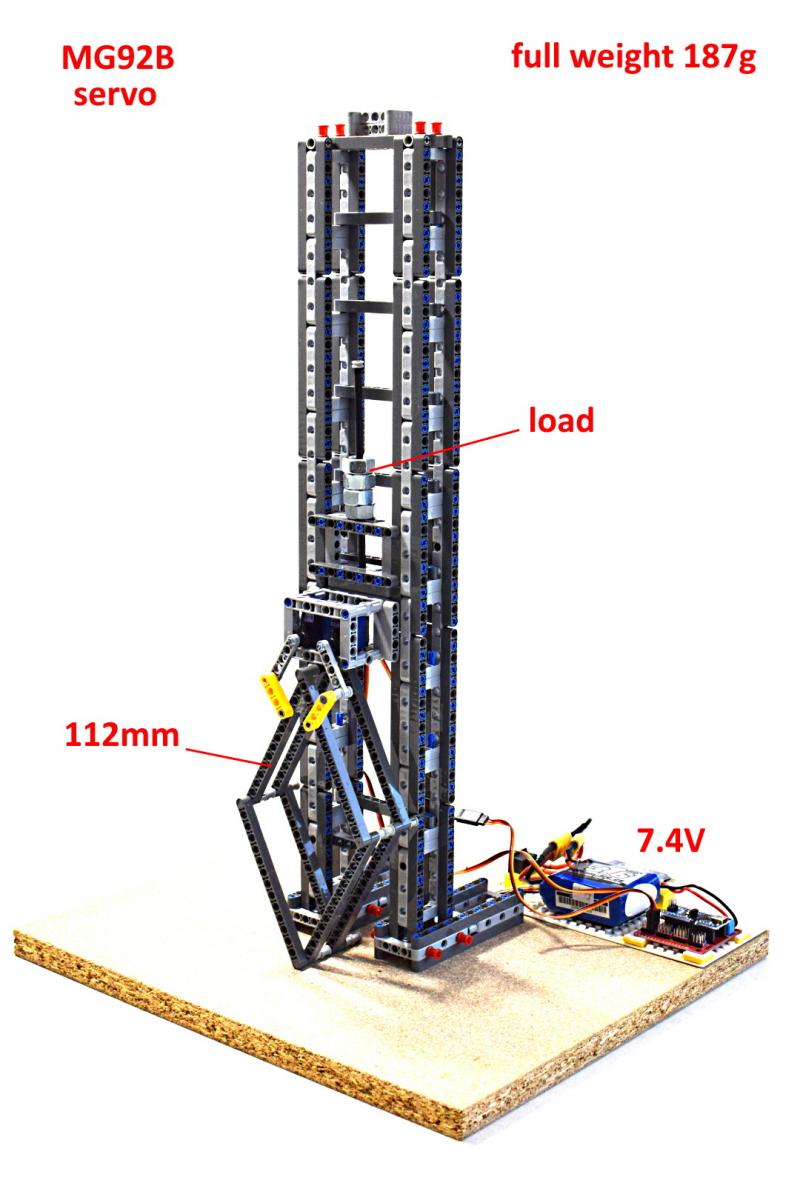
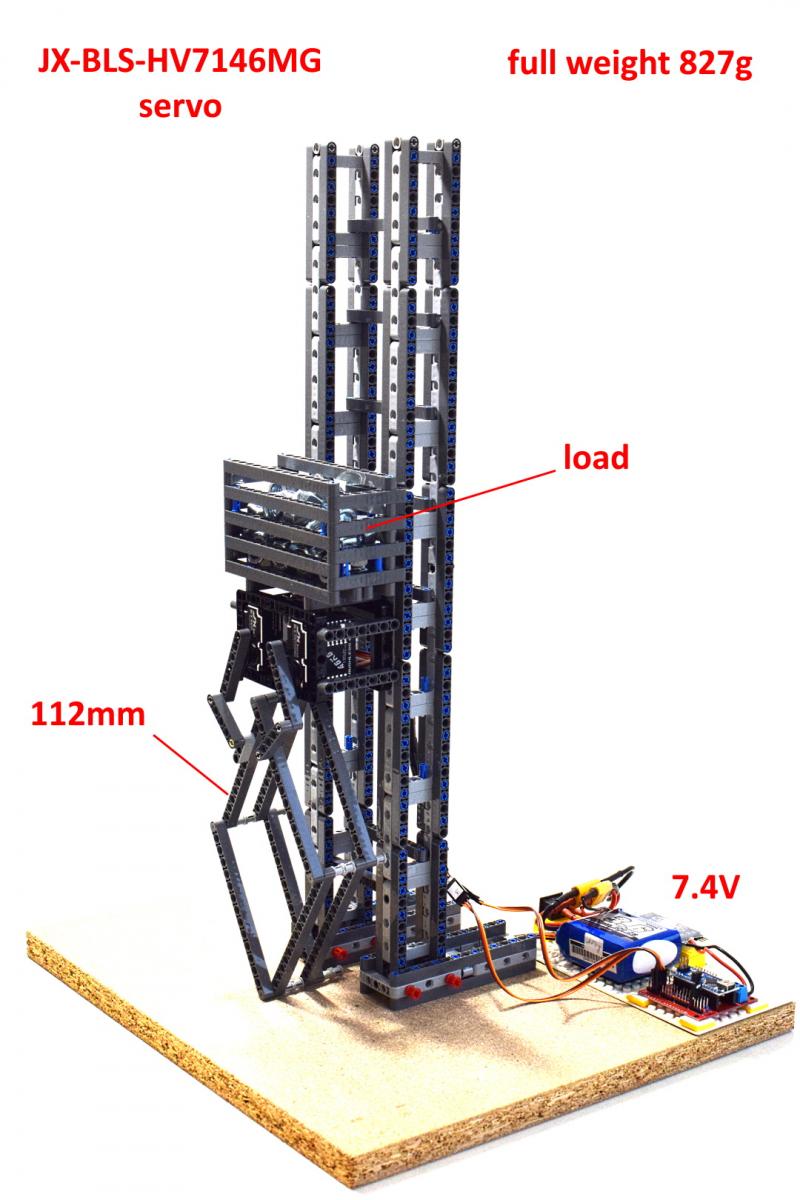
1) Les moteurs :
- si on double la masse et la consommation électrique, on peut sans problème doubler le couple (il suffit de mettre les 2 moteurs en parallèle). Il est donc facile de considérer que le couple est proportionnel a la masse.
- est-ce qu'on peut faire mieux que proportionnel "en théorie" (ie si on considère juste les aimants et le bobinage) : intuitivement je penses pas, mais il faudrait creuser dans les équations fondamentales des moteurs pour s'en assurer
- en pratique, si on "double" le moteur, on peut probablement gagner un peu sur la structure (coque, pour un servo l'électronique de contrôle, ...), donc le rapport coupe/masse (à vitesse angulaire donnée) devrait légèrement s'améliorer avec la taille des moteurs
2) Les batteries : si on double la masse, on peut mettre 2 cellules en parallèles (ou en faire une plus large) : on double donc la capacité et le courant max. L'énergie contenue est aussi doublée (car la tension reste la même). Donc l'énergie disponible est proportionnelle à la masse : le rapport énergie/masse est quasi constant (augmentation très faible avec la masse, il n'y a pas beaucoup de matériaux "de structure" sur lesquels on peut faire des économies)
1+2) Pour résumer, la partie "propulsion électrique" (moteurs + batterie) : si on veut deux fois plus de couple en sortie (à vitesse angulaire et autonomie donnée), alors il faut presque doubler la masse de l'ensemble moteurs+batterie
3) La partie commande (capteurs, arduino, boutons, ...) et gestion de l'alimentation (alarme lipo, convertisseurs éventuels, ...): la plupart de ces composants peut rester identique en agrandissant la taille du robot. Seul les contrôleurs moteurs (dans ton cas intégré dans les servos) et d'éventuels régulateurs de tensions doivent être un peu plus gros pour gérer le courant plus important : pour de petits courants comme sur ton robot, l'impact est très faible.
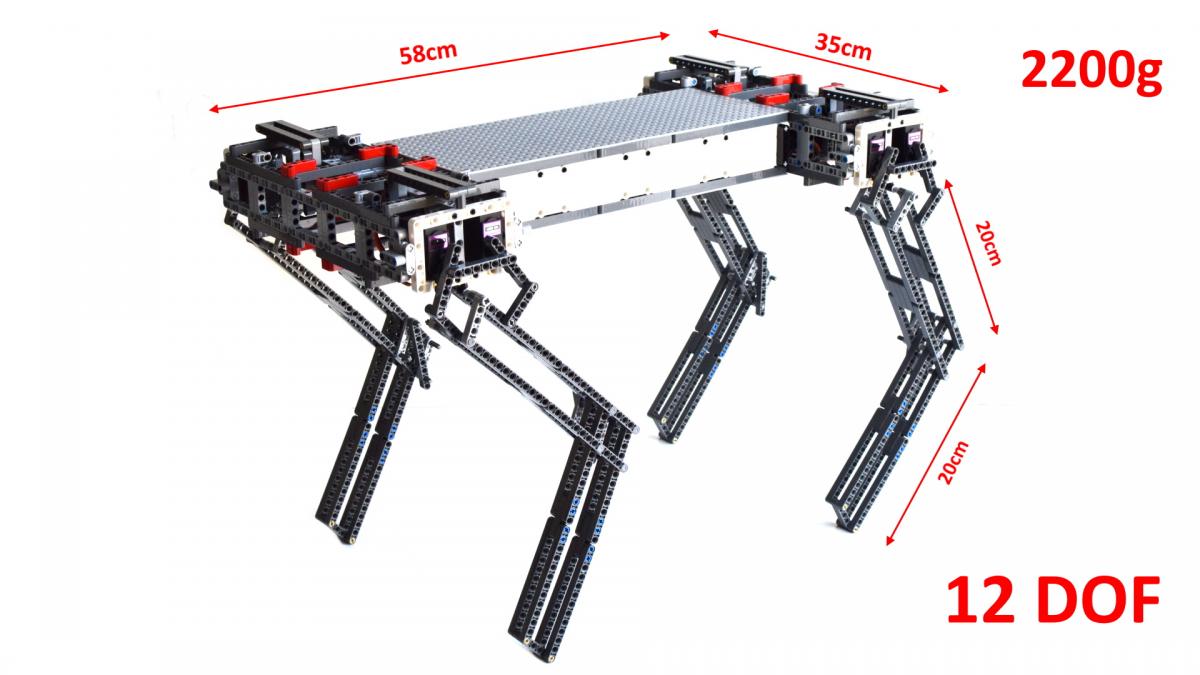
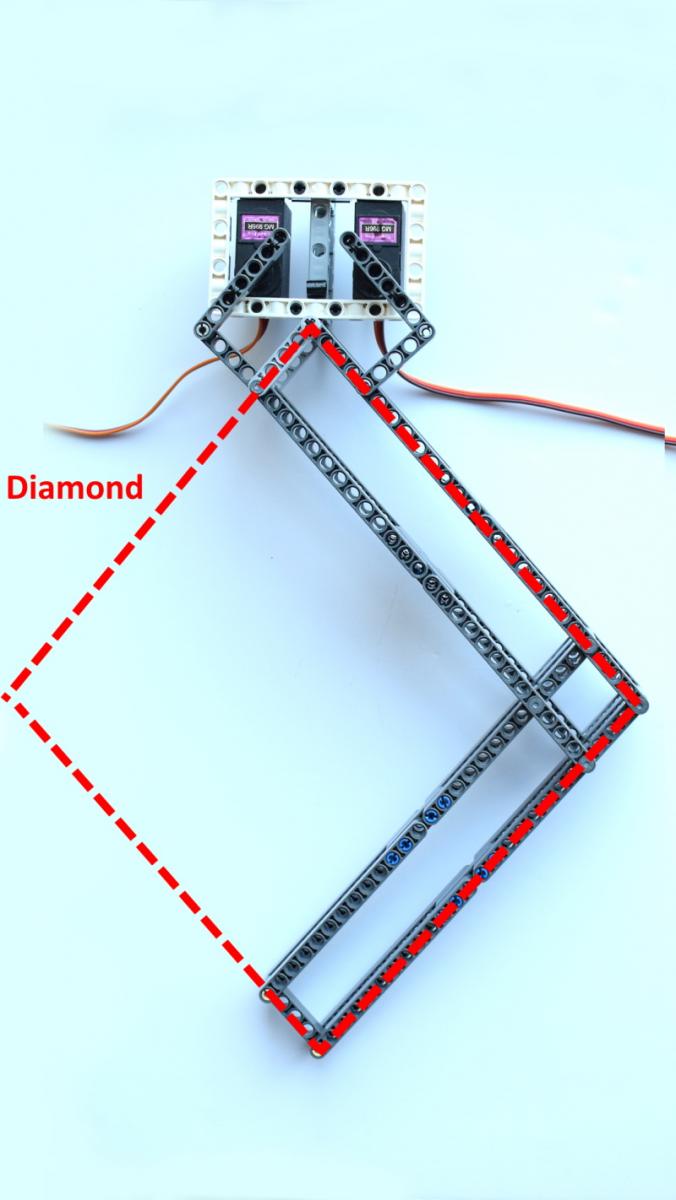
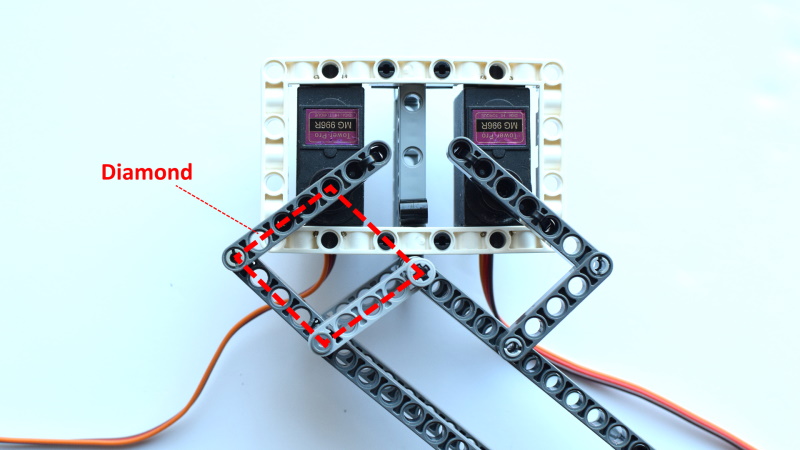
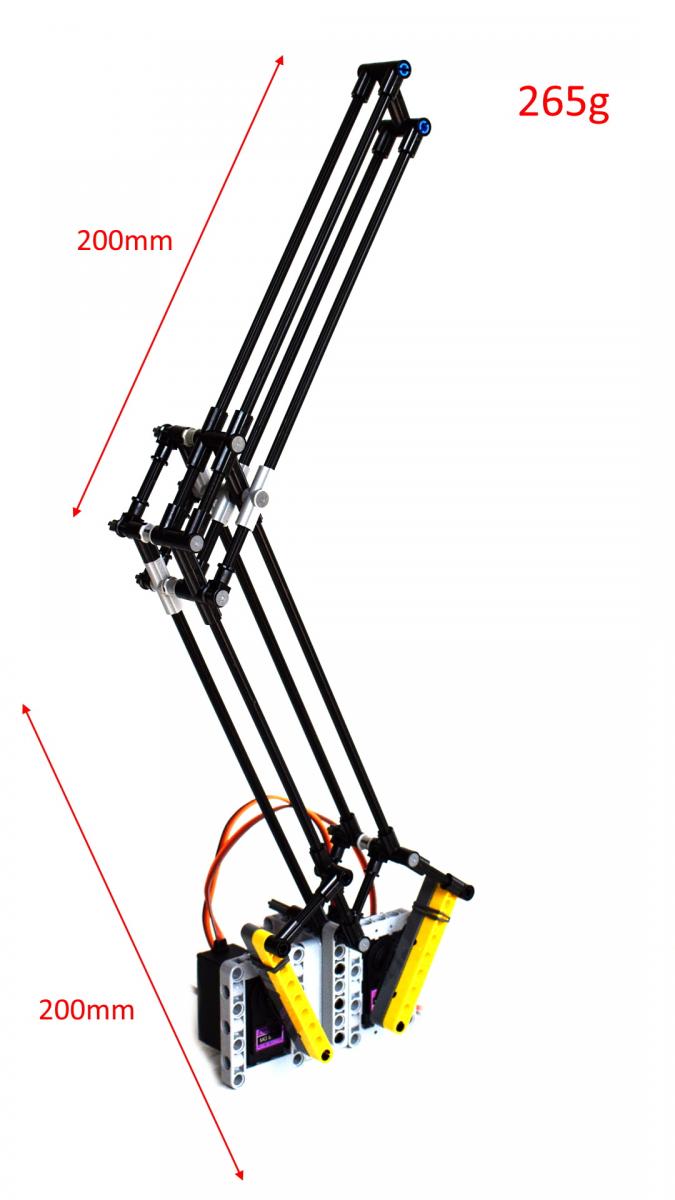
4) Pour les "jambes" (considérées comme une poutre en flexion) : (sources : https://fr.wikipedia...poutres_simpleset https://fr.wikipedia...ent_quadratique )
Si L est la longueur de la jambe, de section a*b (a dans le sens "avant-arrière" (celui où on risque une flexion), b dans le sens gauche-droite où on risque moins la flexion car on reste plus prêt de la verticale.
Si la poutre est fixée à une extrémité, et qu'on applique un poids P=m*g de l'autre.
La déformation(flèche) est proportionnelle à P*(L^3)/I où I est le moment quadratique. Pour une flexion "avant-arrière", I est proportionnel à a^3*b, pour une flexion gauche-droite à b*a^3
Pour simplifier (ie on omet les coefficients de proportionnalité) :
- la flèche avant-arrière est f_aa=P*(L^3)/I=P*(L^3)/(a^3* B)=P*(L/a)^3/b
- la flèche gauche-droite est f_gd=P*(L^3)/I=P*(L^3)/(a*b^3)=P*(L/b)^3/a
Donc :
- si on veut garder la même déformation avant-arrière (ie on ne se soucie pas de la déformation gauche-droite, car on a de la marge), mais multiplier par X le poids du robot, alors le plus efficace est de jouer sur a (la largeur avant-arrière de la jambe) : il suffit de multiplier a par racine cube de X pour compenser. La masse de la jambe est donc proportionnelle à la racine cube du poids du robot. Donc plus le robot est lourd, plus les jambes sont légères en proportion (si la taille des jambes reste la même)
- si on veut garder la même déformation à la fois en avant-arrière et en gauche-droite, mais multiplier par X le poids du robot, alors le plus efficace est de jouer à la fois sur a et b : on multiplie chaque dimension par racine quatrième de X. La masse de la jambe est donc proportionnelle à racine carrée de X (ie racine quatrième de X * racine quatrième de X)
4 bis) suite sur les jambes, mais cette fois-ci on s’intéresse à la rupture des jambes :
- par « superposition » (on met 2 poutres identiques bout à bout), la rupture se fait à une valeur de déformation/longueur donné : si la poutre est 2 fois plus longue, alors on peut déplacer 2 fois plus le bout sans que chaque morceau individuel soit plus tordu).
- on a donc rupture (pour un effort avant arrière) à Cst1=L*f_aa_max et Cst2=L*f_gd_max pour l’effort gauche droite.
- si on multiplie la masse du robot par X, en s’intéressant uniquement à la rupture en flexion avant-arrière : pour compenser, il faut multiplier a par racine cube de X (donc multiplier la masse de la jambe par racine cube de X)
- si on multiplie la masse du robot par X, et qu’on s’intéresse à la rupture en flexion dans les deux sens, alors il faut multiplier a et b chacun par racine quatrième de X, donc la masse de la jambe par racine carrée de X
- si on multiplie la longueur de la jambe par X, à masse du robot fixée : cas où on ne s’intéresse qu’à la rupture en flexion avant-arrière : Cst1=L*f_aa=P*L⁴/(a^3* B) : on peut multiplier a par X^(4/3)=X*racine_cube(X) pour compenser: la masse de la jambe est aussi multipliée par X²*racine_cube(X) (nb : j’ai rajouté un facteur X car la jambe est aussi X fois plus longue)
- idem, mais si on se soucie en plus de la flexion gauche-droite : il faut multiplier a³*b et a*b³ chacun par X⁴ : on peut donc multiplier a et b chacun par X, soit une masse de la jambe multipliée par X³ (nb : j’ai rajouté un facteur X car la jambe est aussi X fois plus longue)
4 ter ) Résumé :
- tant qu’on ne se soucie que de la flexion avant-arrière de la jambe (car il reste assez de marge en gauche-droite, qui est moins sollicité) : la masse de la jambe (M_jambe) est proportionnelle à racine_cube(M_robot)*L²*racine_cube(L) où L est la longueur de la jambe et M_robot la masse du robot
- si le robot devient assez gros pour que la flexion gauche-droite commence aussi à poser problème, alors ça devient pire: la masse de la jambe (M_jambe) est proportionnelle à racine_carrée(M_robot)*L³ où L est la longueur de la jambe et M_robot la masse du robot
5) Couple nécessaire pour les moteurs (pour supporter le poids du robot) : le couple C est proportionnel à L*M_robot (une jambe 2 fois plus longue double le bras de levier, un robot 2 fois plus lourd nécessite deux fois plus de force).
6) vitesse de progression : tant que les moteurs parviennent à garder la même vitesse angulaire, la vitesse est proportionnelle à la longueur des pas, donc à la longueur des jambes (L).
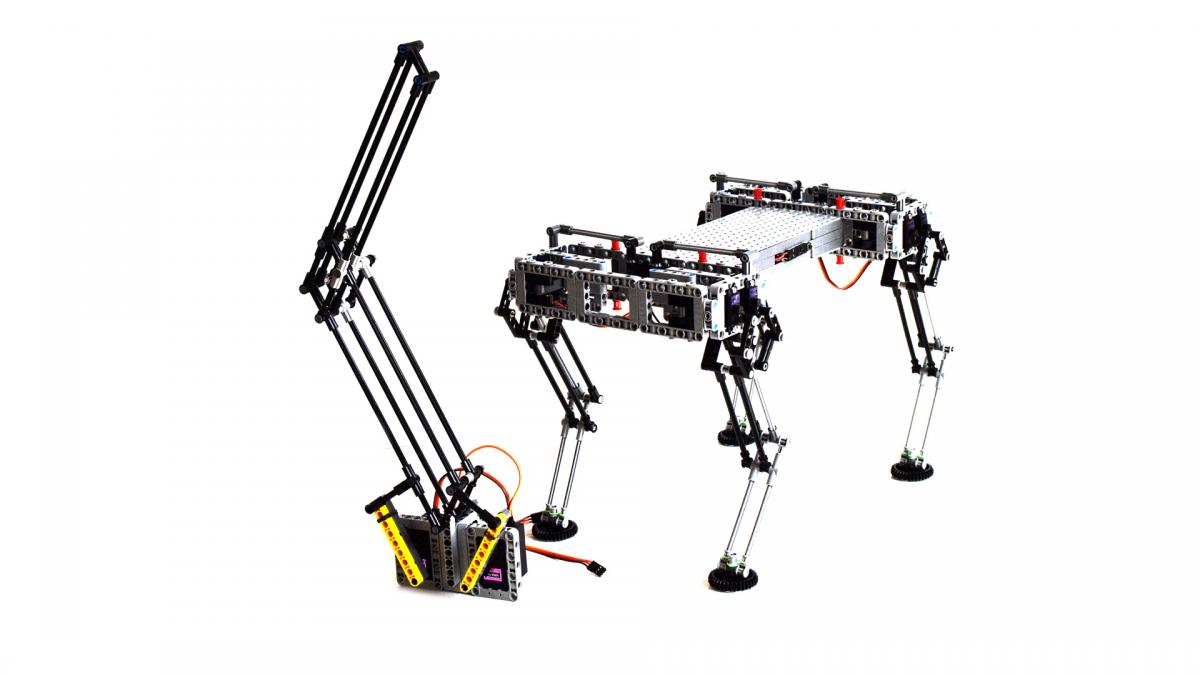
7) pour la masse du « tronc », honnêtement, je ne sais pas trop quels sont les effets dominants (@Oracid : en pratique, c’est quoi la première « faiblesse » du tronc que tu as rencontrée?)
Si on suppose que la taille de tronc est proportionnelle à celle des jambes, alors :
- si on considère le tronc comme une plaque (et qu’on n’a pas besoin d’en augmenter l’épaisseur pour la rigidifier) , alors la masse du tronc (M_tronc) est proportionnelle à L²
- si on considère qu’il faut augmenter l’épaisseur dans la même proportion, alors M_tronc est proportionnel à L³
- la réalité est probablement quelque part entre les deux







 >>
>>