Bonjour tout le monde,
Je post ce sujet afin de vous présenter mon petit projet perso. 
Tout n'est pas encore claire car j’expérimente beaucoup.
Pour concevoir ma petite machine, j'ai décidé de suivre deux "paradigmes" :
- utiliser au maximum des pièces de récupérations
- me faire plaisir
Petite description
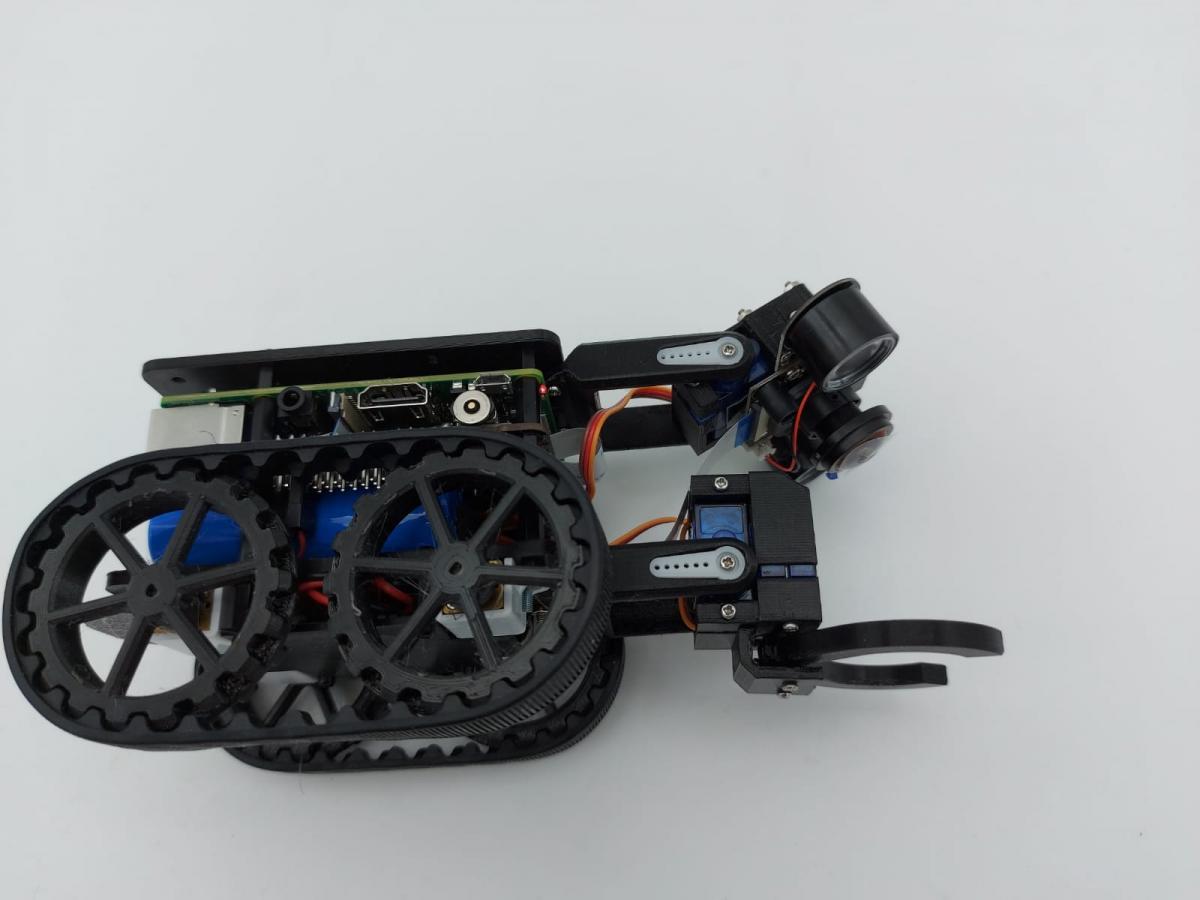
Le projet consiste en un robot sur chenilles muni d'une caméra frontale et d'un éclairage.
Je l'ai baptisé le "Crotale I".
Crotale pour l'aspect quasiment rampant de ma machine et "I" parce que si la première version n'est pas au point, il y aura bien entendu un II, III, IV, etc.
Ce projet est un loisir me permettant d'acquérir de nouvelles compétences, il n'a donc pas vocation a être spécialement utile en soit.
La partie mécanique
Le châssis et la carrosserie sont en cours d'étude! 
Le châssis sera composé d'une simple planche en bois ajourée dans la limite du raisonnable.
La carrosserie sera certainement dans un matériaux très léger type papier mâché, carton, armature de file de fer, voir une simple toile.
Les moteurs seront pris en étaux entre le châssis et des barres perforées.
Les barbotins, composés d'une rondelle crantées en bois et d'un clou collé à la colle chaude, seront reliés directement aux arbres moteurs grâce à des dominos.
Les poulies de renvois seront quasiment identique.
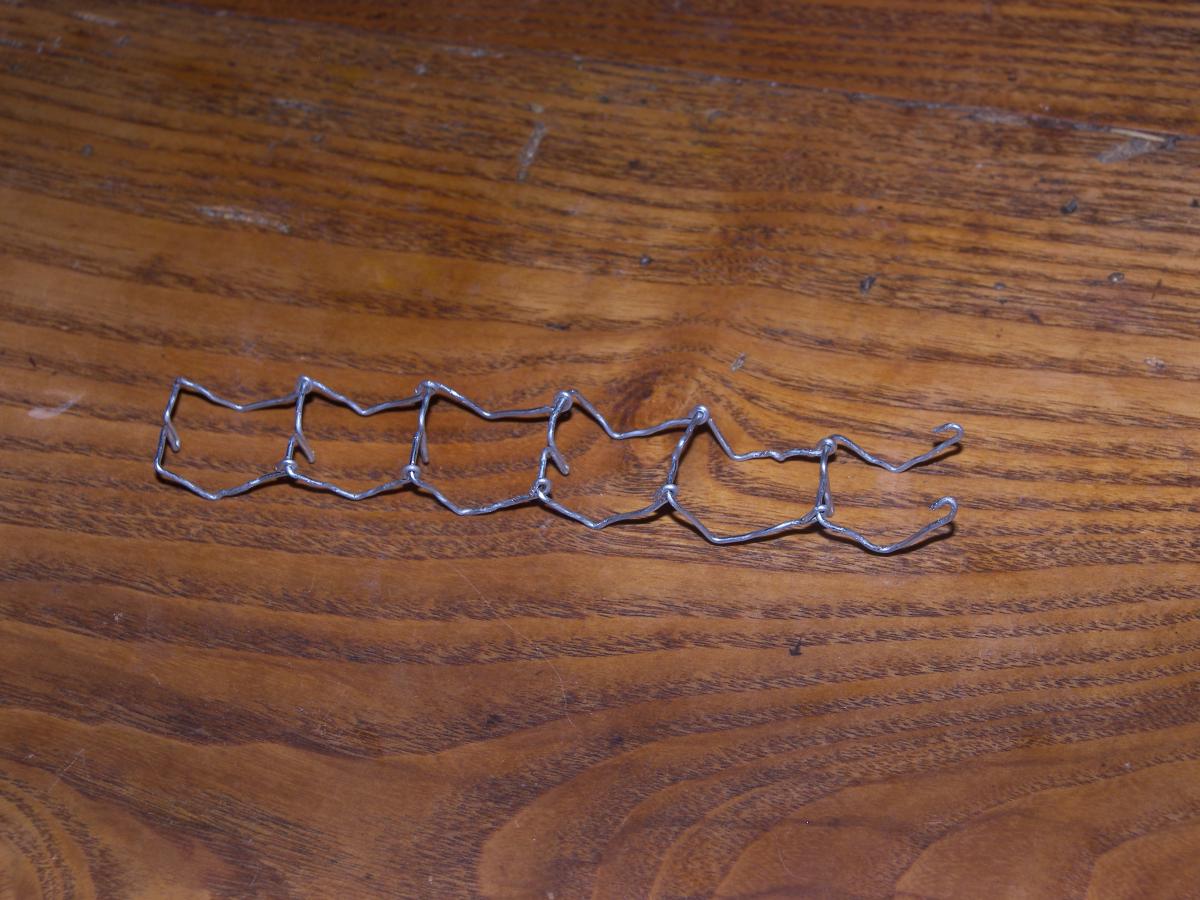
Un premier essai avec des muselets de bouteilles de cidre m'a permis de créer une chenille test qui s'avère être très robuste et souple mais pas suffisamment précise pour rester bien en place sur les galets.
La partie électronique
- Raspberry pi zero wh
- une carte à un relais
- Une led blanche 6v
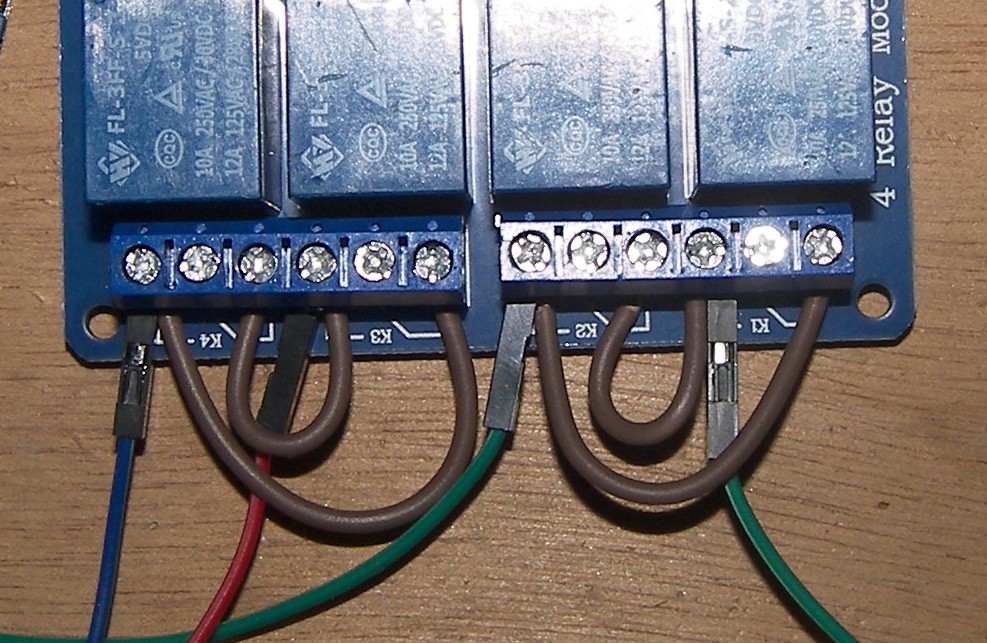
- une carte à quatre relais
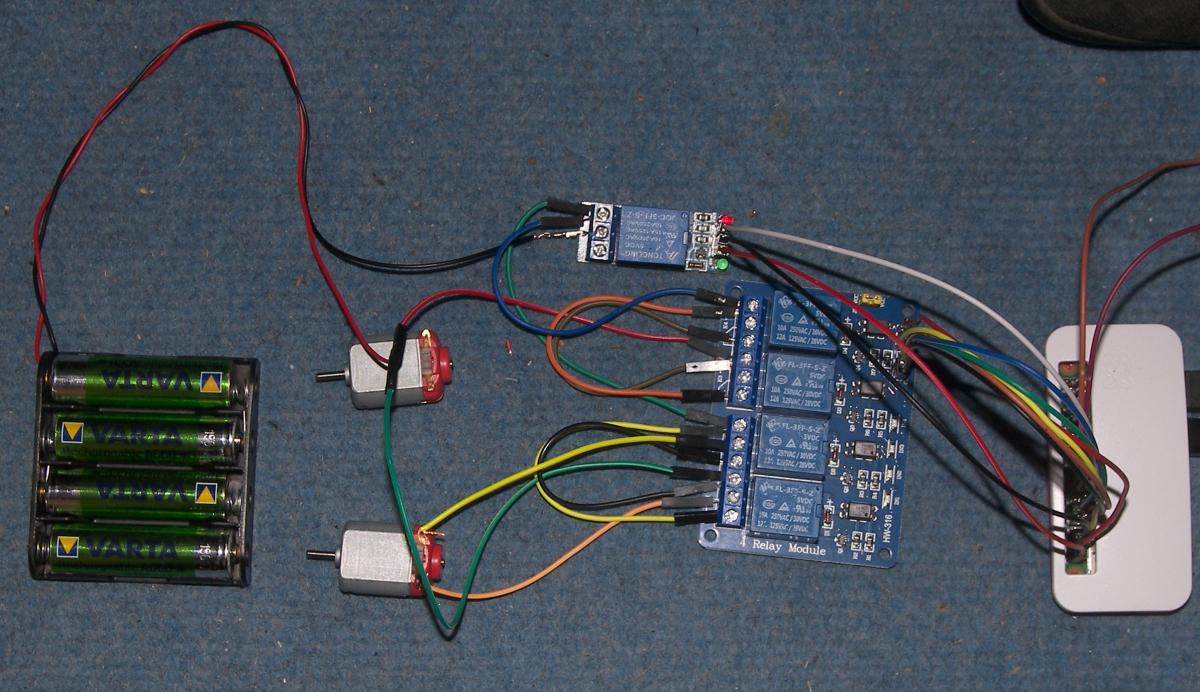
- deux moteurs de 3v
- une batterie lipo de 750mah (alimentation RPi)
- un boîtier pour 4 piles AA (alimentation moteurs et lampe)
- une webcam usb ou la camera officiel Raspberry(si je trouve une nappe suffisamment longue)
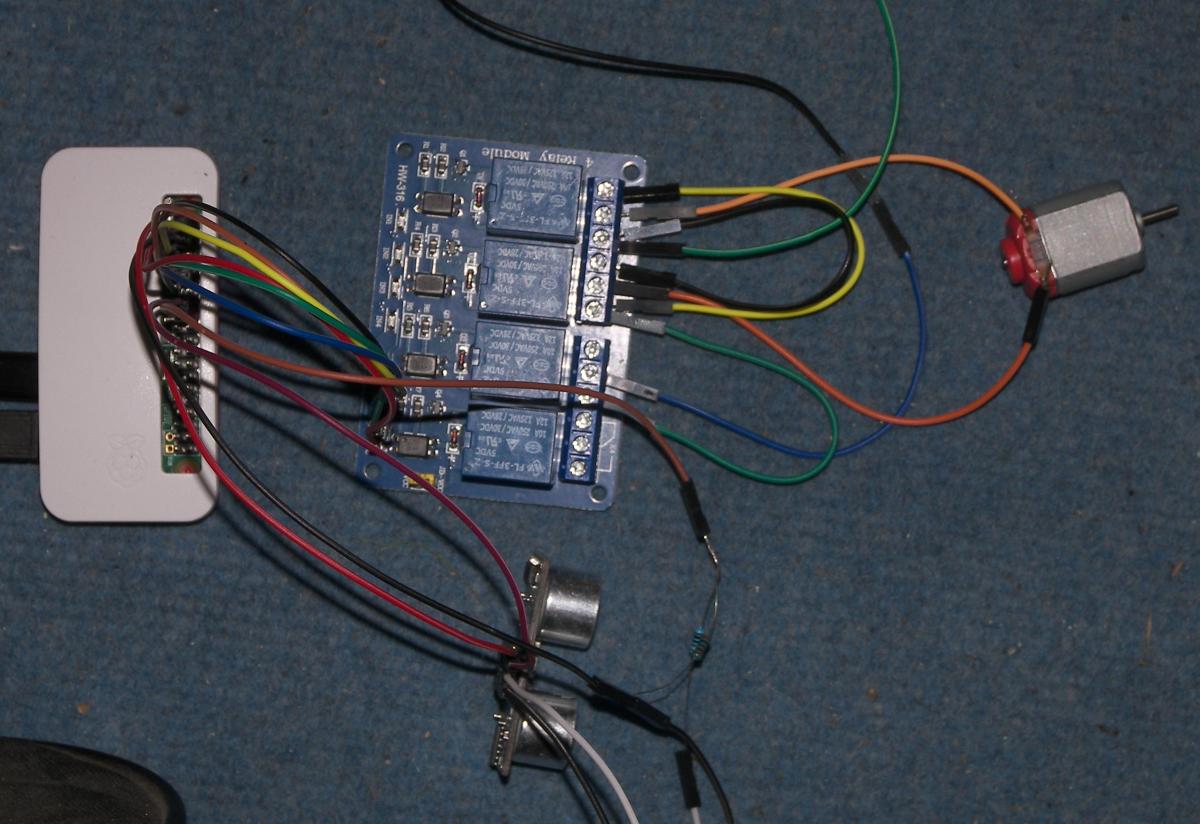
Pour faire court, le RPi commande via 5 broches du GPIO les 5 relais.
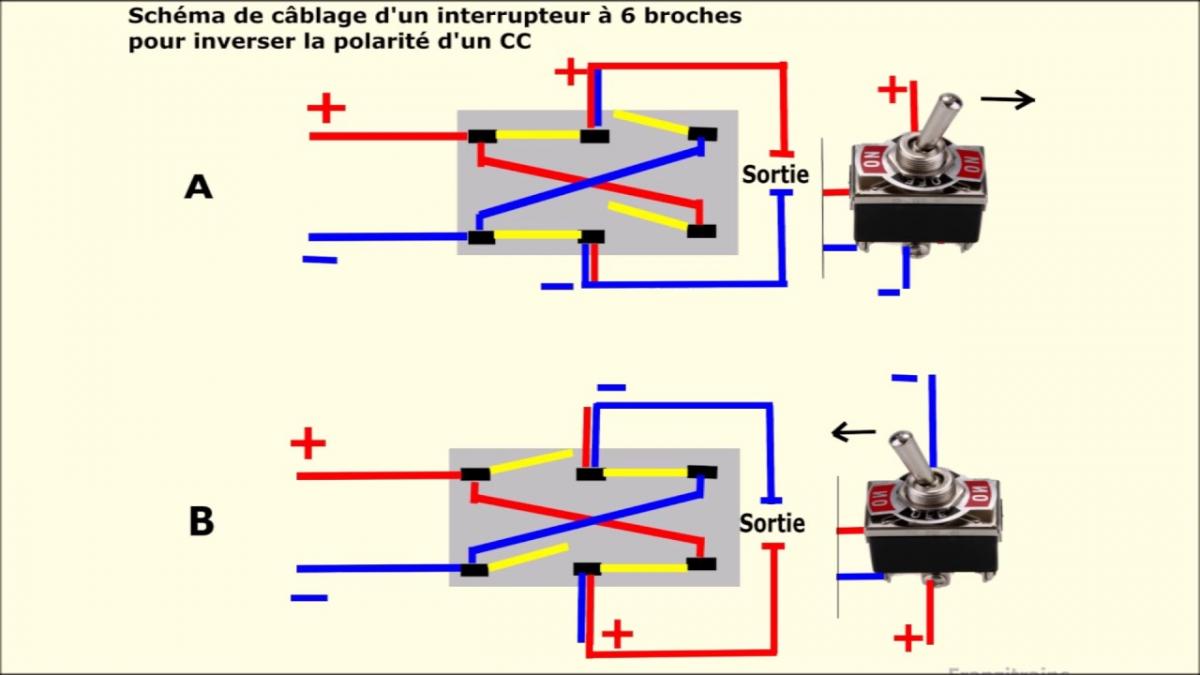
La carte à quatre relais permet de choisir un circuit précis correspondant à : marche avant, marche arrière, tourne à gauche, tourne à droite.
Marche avant : les deux moteurs tournent dans le sens anti-horaire
Marche arrière : les deux moteurs tournent en sens horaire
Tourne à gauche: moteur gauche sens horaire et moteur droit sens anti-horaire
Tourne à droite : moteur gauche sens anti-horaire et moteur droit sens horaire
La carte a 1 relais permet l'allumage et l'extinction de la lampe.
La partie software
Le RPi sera configuré comme point d’accès wifi via hostapd afin de s'affranchir de la nécessité d'un routeur.
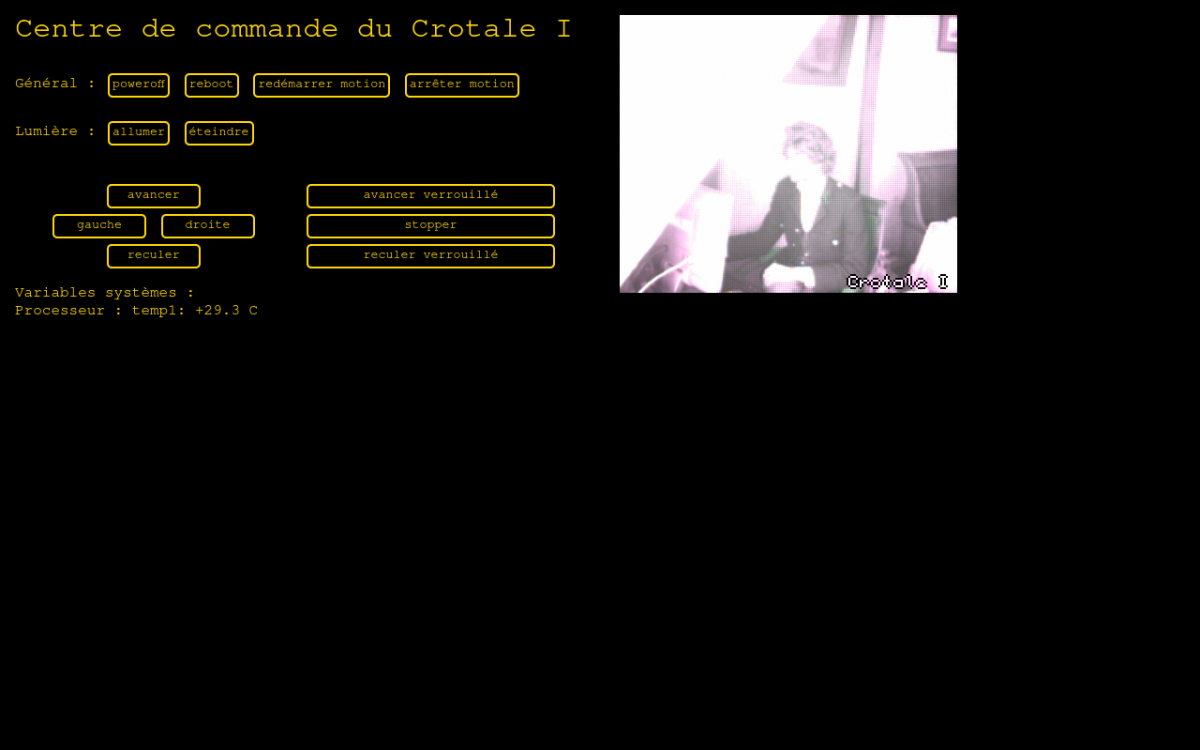
Il sera contrôlé via un frontal apache2 séparé en deux <iframe>.
Le premier fait référence à une page contenant une série de boutons permettant d'activer les scripts python pour interagir avec les relais, mais aussi à éteindre ou redémarrer le robot.
Quelques indication seront à disposition (température du SoC, stockage disponible, état de la mémoire...).
Grace au fichier sudoers, j'ai pu autoriser "www-data" à lancer la commande python3, poweroff et reboot via shell_exec().
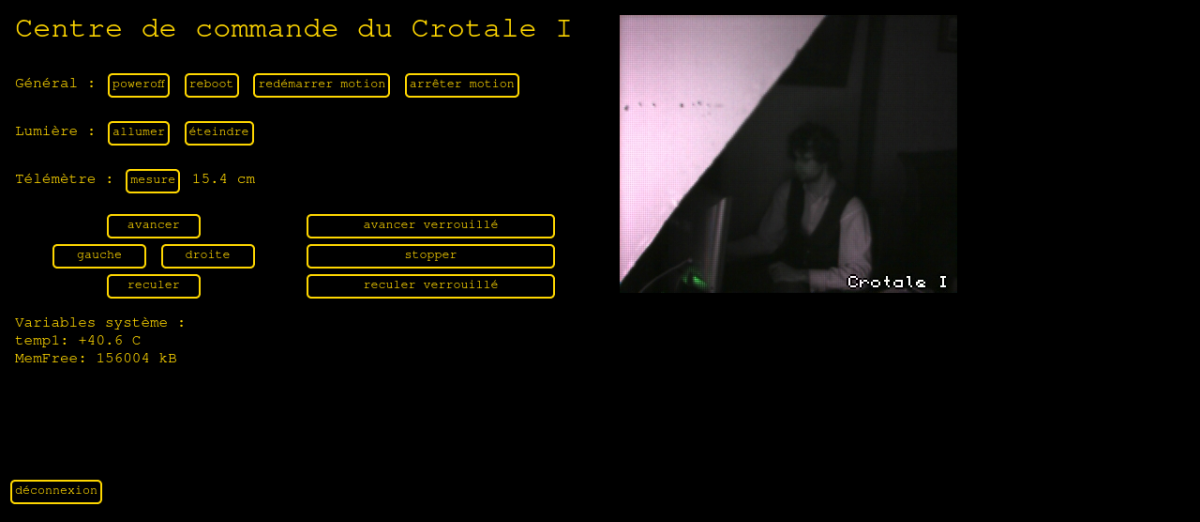
Le second <iframe >permet la visualisation de la camera motion.
Je prévois d'utiliser quelques capteurs afin d'assister le pilotage de l'engin et de lui éviter des chutes.
Je pense a un HC-SR04(j'en ai deux en stock), qui sera disposé à 45° à l'avant de l'engin afin de stopper les moteurs en cas de mesure trop importante, et donc d'absence de sol.
Actuellement
Actuellement, la partie informatique fonctionne très bien.
La source d'alimentation du RPi a été réalisée.
Je dois recevoir un certain nombre de pièces qui me permettront d’effectuer des pesée, de faire mes premiers dessins à l'échelle et de choisir les dimensions du châssis.
Les petits plus
Si le projet de base se termine bien, j'envisagerai l'amélioration de celui-ci.
Par exemple en incluant une cellule photovoltaïque, des caméras latérales, des capteurs supplémentaires...