
NB: J'échange le gros 4x4 contre un chapeau mexicain, un grand, authentique !
Cela va être très difficile, les valises sont bourrées à bloc. Ou alors, tu auras une crêpe . . .

Pilier du forum

Posté 27 février 2023 - 01:45
NB: J'échange le gros 4x4 contre un chapeau mexicain, un grand, authentique !
Cela va être très difficile, les valises sont bourrées à bloc. Ou alors, tu auras une crêpe . . .
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Pilier du forum
Posté 27 février 2023 - 01:58
Do these motors have the performance to be good for robotics? Is it worth the effort to engineer them, does this offset the cost?
I think the e-byke techno is the best way to make big robots. Although I haven't solved all the problems.
They are several ways. Patrick chose the hacking of the hoverboard mothercard, while I opted for the e-bike controllers.
Today, at Valladolid, the temperature reached 35°. My brain is cooked.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Staff Robot Maker

Posté 27 février 2023 - 04:15
Cela va être très difficile, les valises sont bourrées à bloc. Ou alors, tu auras une crêpe . . .
Tu peux pas le porter sur la tête dans l'avion ? 
Sinon tu le fais livrer dans un grand colis
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné

Posté 16 mars 2023 - 11:05
Tu as un asservissement en vitesse ? Si tu mets le robot sur un plan incliné il va freiner les roues pour garder sa trajectoire ?µ
Pour ma part c'est ce qui me paraît le plus difficile à faire...
Bonsoir,
Voici (enfin) le test en pente. J'ai fait deux essais, un premier à 20% et un second à 33%. Avec sa masse de 13kg et ses roues à pneus pleins lisses, je ne peux pas monter de pente plus forte.
On voit l'effet des PID qui maintiennent le robot à vitesses d'avance et de rotation quasi nulles dans la pente lorsque je ne touche pas au gamepad (Vx = Wz = 0).
L'asservissement ne peut pas être parfait car il est en vitesse et non en position, et les basses vitesses sont difficiles à mesurer avec les effets Hall.
Qu'en pensez-vous ?
Patrick.
Membre chevronné

Posté 16 mars 2023 - 11:22
Bonsoir,
vu la pente, ça m'a l'air pas mal.
Après, on remarque que tu roules toujours vers le bas, sans que ça semble se stabiliser. Normalement, si tu augmentes la valeur de I, tu devrais réussir à ce que l'intégrale arrête ta descente après un petit moment. Après, le risque, c'est que quand tu changes de consigne, tu ais une "inertie" artificielle qui soit gênante. A tester.
Après, comme tu dis, si tu veux aller plus loin, tu peux ajouter un contrôle en position par dessus le contrôle en vitesse (ie tu utilises l'erreur de position pour calculer la vitesse, et l'erreur de vitesse pour calculer le PWM) : ça devrait te permettre de vraiment maintenir ta position sur une pente (tant que tes roues roulent sans glisser)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre passionné
Posté 16 mars 2023 - 11:42
La carte de puissance hoverboard s'en tire plutôt bien en effet, avec l'aide d'un PID externe.
Oui, le Ki entraine de l'inertie, et effectivement cela va rendre le pilotage plus difficile en condition normale, c'est à dire sur du plat.
Ce robot est plutôt destiné à la navigation en intérieur, sol lisse et plan.
En pente, le robot descend lentement en l'absence de commande. Lorsque les roues adhèrent, le pilotage manuel est réactif et on perçoit à peine l'effet de la pente au gamepad.
En pilotage automatique via la navigation de ROS2, le robot se "défend" si on cherche à le déplacer. L'asservissement en position est automatique. Je ne peux pas faire le test en pente car la cartographie (SLAM) et la navigation autonome ne fonctionnent bien qu'à plat !
Patrick.
Staff Robot Maker
Posté 17 mars 2023 - 12:45
Bonsoir,
vu la pente, ça m'a l'air pas mal.
Après, on remarque que tu roules toujours vers le bas, sans que ça semble se stabiliser. Normalement, si tu augmentes la valeur de I, tu devrais réussir à ce que l'intégrale arrête ta descente après un petit moment. Après, le risque, c'est que quand tu changes de consigne, tu ais une "inertie" artificielle qui soit gênante. A tester.
Après, comme tu dis, si tu veux aller plus loin, tu peux ajouter un contrôle en position par dessus le contrôle en vitesse (ie tu utilises l'erreur de position pour calculer la vitesse, et l'erreur de vitesse pour calculer le PWM) : ça devrait te permettre de vraiment maintenir ta position sur une pente (tant que tes roues roulent sans glisser)
Pour tout ce qui est PID avec consigne qui varient et forte intégrale il est parfois judicieux de tout simplement remettre à zéro l'intégrale de l'erreur lorsque la consigne change de sens afin de grandement limiter l'effet d'inertie.
En pente, le robot descend lentement en l'absence de commande. Lorsque les roues adhèrent, le pilotage manuel est réactif et on perçoit à peine l'effet de la pente au gamepad.
Après personnellement je trouve que le résultat est déjà très bien pour un simple asservissement en vitesse avec capteurs à effet hall ...
Le robot a visiblement tous les capteurs nécessaire pour se localiser et ajuster son contrôle de position avec des consignes en vitesse si nécessaire...
Reste plus qu'à faire en sorte que le slam marche tout le temps :
=> soit tu fais en sorte que ton slam marche quand le robot n'est pas à plat,
=> soit tu fais croire à ton slam que le robot est à plat 
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 17 mars 2023 - 07:32
Oui, la solution à base de composants d'hoverboard s'en sort bien. Je n'ai pas fait de test d'endurance et je n'ai pas mesuré la température de la carte de puissance. Mon robot a deux ventilo qui aident à la dissipation thermique.
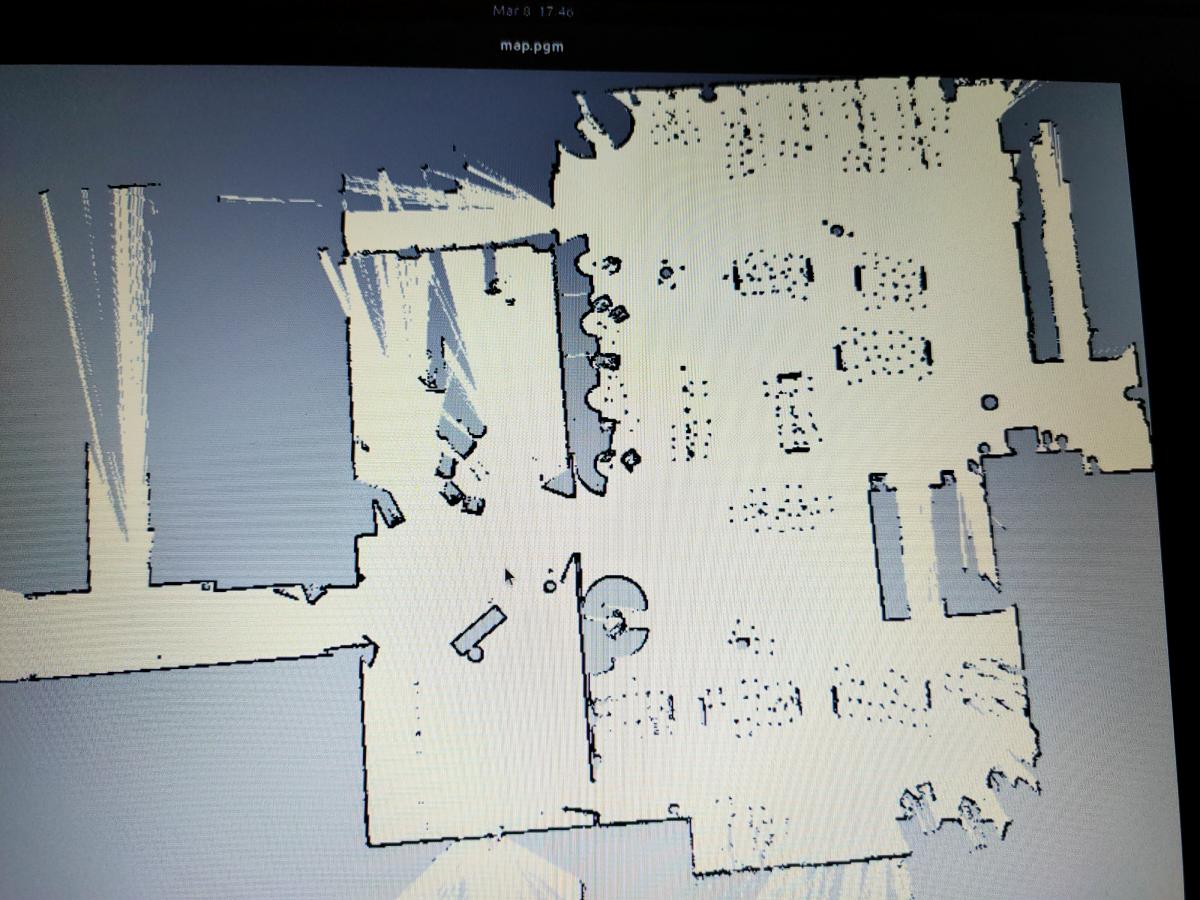
(1pixel = 5cm)
Pour ce robot d'intérieur, le SLAM fonctionne sur la base des outils ROS2. L'odométrie (IMU+roues+EKF) fonctionne en 2D. Les principales difficultés sont :
- la portée wifi qui limite l'évolution à partir d'un PC de contrôle (même avec des antennes wifi montées sur mat et un routeur intermédiaire à 4 antennes),
- et les dimensions du robot qui sont rendent la navigation automatique en intérieur plutôt dangereuse pour les passages de porte et les façades de meubles Ikea en carton !
Pour un robot destiné à fonctionner en extérieur, je n'ai pas de projet de ce type encore, mais je pense que la localisation peut profiter d'un GNSS (RTK) et d'une IMU 3D. J'ignore si on trouve sous ROS2 de quoi faire une cartographie tenant compte du Z. Surement...
L'autre question qui se posait sur le forum est la capacité de ces composants à fournir assez de puissance pour faire tourner un 4x4, voire un 6x6, avec des roues fixes (pas de direction). A suivre.... 

Patrick.
Staff Robot Maker
Posté 17 mars 2023 - 10:59
Delivery robot on the way !
Tu nous prépare un projet de startup en "secret * " sur ton temps libre ? ( * "Secret" c'est vite dit si tu nous partages en temps réel les différentes étapes et avancées ^^ )
L'autre question qui se posait sur le forum est la capacité de ces composants à fournir assez de puissance pour faire tourner un 4x4, voire un 6x6, avec des roues fixes (pas de direction). A suivre....
Patrick.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre chevronné

Posté 17 mars 2023 - 12:08
Delivery robot on the way !
Tu nous prépare un projet de startup en "secret * " sur ton temps libre ?
On dirait un resto ou un truc du genre 
Habitué

Posté 18 mars 2023 - 08:45
Bonjour
@Pat92fr : super le robot. Il a l'air de bien se comporter dans la pente.
Tu utilises du matos plus spécifique (ROS2 SLAM, ...) qui a l'air nettement plus performant que la solution Arduino Mega / contrôleur ZS-X11H
En termes de coût tu te situes à quel niveau ?
Membre passionné
Posté 18 mars 2023 - 05:41
Bonjour,
Merci.
Voici la liste des composants que j'utilise dans ce robot :
- Hoverboard 6.5 pouces Génération 1 (occasion LbC moteurs, carte de puissance, batterie, et chargeur pour ~30€)
- Roue libre (récupération)
- NUC Intel i3 (occasion LbC pour 100€)
- DC/DC 36V vers 12V 10A min (20€)
- Adaptateurs USB/Série (10€)
- IMU (50€)
- LIDAR (160€ ou plus selon modèle)
- Antenne WIFI (25€)
- Bois MDF, Impression 3D et des profilés alu 20x20 (100€)
- Divers : vis, écrous, connecteurs XT, fils, interrupteurs (stock)
La caméra 3D fonctionne, mais je ne l'exploite pas encore. C'est pour la suite !
Je vais certainement retoucher la mécanique, pour faire un base roulante légèrement plus compacte, afin de faciliter la navigation en intérieur.
Même s'il ne va pas très vite avec les réglages de base de ROS2/Navigation2, chaque "sortie" demande beaucoup de précautions...

Je prévois d'ajouter un bras manipulateur 5/6 axes "fait-maison", sur cette base roulante, pour la fin de l'année, pilotée avec ROS2 (move it).
Patrick.
Membre occasionnel

Posté 18 mars 2023 - 06:06
Wow Patrick,
that is a nice build!
questions:
- Is there an advantage for this IMU vs something like a MPU6050?
- are you happy with the LIDAR? I haven't started playing with one yet, I am just curious about what is good in a choice. also since it is the most expensive sensor of the robot.
- "LcB" is french for ???
thanks!
Doug
Staff Robot Maker
Posté 18 mars 2023 - 06:25
- "LcB" is french for ???
Lbc => I believe it is the french website "leboncoin.fr" where people present stuff they want sell
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 18 mars 2023 - 06:26
Wow Patrick,
that is a nice build!
questions:
- Is there an advantage for this IMU vs something like a MPU6050?
- are you happy with the LIDAR? I haven't started playing with one yet, I am just curious about what is good in a choice. also since it is the most expensive sensor of the robot.
- "LcB" is french for ???
thanks!
Doug
Thanks Doug !
I was looking for an IMU I can connect to the NUC Intel. Inside this component, there is probably a MPU6050 or 9250... :-)
Actually, I am using a high-end lidar, but a LD06 works fine indoor and do the job.
LbC is "Le Bon Coin" (used online sales)
Habitué
Posté 18 mars 2023 - 10:03
Merci pour la liste de matériel.
Je ne comprends pas comment tu fais l'interface entre le petit pc et la carte de l'hoverboard.... c'est une connexion série ?
L'IMU a l'air bien.
J'en ai essayé quelques uns pour guider le robot selon un cap déterminé. Mais la précision n'était pas au rendez-vous. Le cap variait de plusieurs degrés alors que le robot ne changeait pas de direction.
Tu es satisfait de cet IMU ?
Merci en tout cas pour les infos.
Membre passionné
Posté 18 mars 2023 - 10:49







0 members, 2 guests, 0 anonymous users






