
Peux-tu nous montrer une photo de ton moteur, coté enjoliveur ?

411 réponses à ce sujet
#141

Oracid
-
- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
#142
dakota99
-

- Membres
-
- 253 messages
Habitué
- Gender:Male
- Interests:programmation Windev, Webdev, aviation, robotique, domotique, drones
Posté 09 décembre 2022 - 06:30
J'ai testé un paquet de combinaisons (mais pas toutes les 36)
Celle qui semble la moins mauvaise chez moi :
Moteur : NOIR ROUGE BLEU VERT JAUNE
Hall : ROUGE BLEU VERT JAUNE NOIR
Le moteur consomme à vide 700 mA ce qui me paraît correct.
Le bruit semble normal
Le frein fonctionne
Le changement de sens de rotation fonctionne.
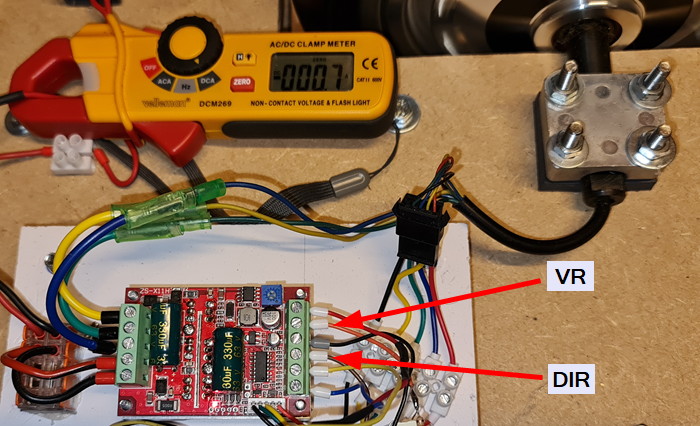
Par contre la vitesse est rapide alors qu'elle devrait être lente avec le filtre passe bas. Valeur PWM 20.
La tension sur la borne signal (VR) est pourtant de 1.7V.
Même si le fil est enlevé de cette borne, le moteur tourne toujours à la même vitesse.

#144
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 décembre 2022 - 09:02
Même si le fil est enlevé de cette borne, le moteur tourne toujours à la même vitesse.
ça, c'est surprenant et inquiétant.
Si tu as un oscilloscope, tu devrais visualiser le signal. En principe, il devrait aller de 0V à 3V, mais cela dépend de la valeur réelle des composants.
Et donc, le moteur va de l'arrêt à une grande vitesse.
Merci pour la photo. Non, rien à voir avec les moteurs que j'ai.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#145
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 décembre 2022 - 08:24
Même si le fil est enlevé de cette borne, le moteur tourne toujours à la même vitesse.
J'ai fait ce test, ce matin. J'ai retiré le fil. Le moteur s'arrête bien.
Bien sûr, le moteur continu à tourner un peu, à cause de l'inertie, parce que je n'utilise pas le frein, mais après une seconde, il s'arrête.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#146
dakota99
-
- Membres
-
- 253 messages
Habitué
- Gender:Male
- Interests:programmation Windev, Webdev, aviation, robotique, domotique, drones
Posté 10 décembre 2022 - 09:08
Merci Oracid d'avoir fait le test.
Je fais forcément une boulette quelque part mais je ne vois pas où.
Je vais m'assurer que ça fait bien la même chose avec la seconde carte.
Nous avons les mêmes cartes excepté que j'ai la version V2
J'ai juste un doute avec "PWM ENABLE JUMPER" je vais quand même tester
#147
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 décembre 2022 - 09:28
Nous avons les mêmes cartes excepté que j'ai la version V2
J'ai juste un doute avec "PWM ENABLE JUMPER" je vais quand même tester
Je n'ai également que des cartes V2.
Le PWM ENABLE JUMPER est utilisé avec le connecteur en bas à gauche. Malheureusement, ce connecteur est en forme de pastille à souder, sans connecteur à proprement parler.
Dans notre cas, nous n'utilisons pas un signal PWM, mais un signal analogique sur l'entrée potentiomètre.
Si tu veux utiliser ce connecteur, tu devrais revoir cette vidéo, https://www.robot-ma...board/?p=116760
De plus, ce connecteur n'est pas au pas de 2.54. Il te faudra donc, soit trouver le bon connecteur soit souder une nappe de fils.
A mon avis, tu as un problème avec ton filtre. Si tu n'as pas d'oscillo, tu peux utiliser un voltmètre et contrôler que la tension démarre à 0V, jusqu'à environ 3V quand il est connecté à la carte, c'est à dire avec la charge. Sinon, à vide, en sortie de l'Arduino, il devrait aller jusqu'à 5V.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#148
dakota99
-
- Membres
-
- 253 messages
Habitué
- Gender:Male
- Interests:programmation Windev, Webdev, aviation, robotique, domotique, drones
Posté 10 décembre 2022 - 10:17
C'est bien que nous ayons les mêmes cartes 
Ok PWM Jumper : j'oublie c'est pas la bonne piste, je n'y touche pas.
J'ai installé la seconde carte : idem il n'est pas nécessaire de raccorder le fil analog ctrl, le moteur tourne
Concernant le filtre : si j'installe l'ancienne carte, tout fonctionne donc je considérais qu'il était ok.
Mais j'ai encore une fois suivi tes conseils et procédé à une sévère remise en question...
J'ai déconnecté l'Arduino et installé un potentiomètre et là tout va bien.
Et si j'enlève le fil signal le moteur s'arrête. Que du bonheur.
Donc tu as apparemment raison le problème vient du montage avec l'Arduino.
Je cherche.
#149
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 décembre 2022 - 12:21
Ce matin, j'ai décidé de faire les premiers tests en extérieur, sur ma terrasse.
Malheureusement, les tests ont été très décevants. En ligne droite, le robot avance et recule, sans problème.
Mais dès que je veux le faire tourner, il n'a pas assez de puissance pour compenser la forte adhérence du caoutchouc des roues.
En fait, il n'a aucune puissance, je l'arrête à la main sans aucun problème.
Les contrôleurs ZS-X11H ne délivrent aucune puissance. Ils font illusion, car les moteurs tournent bien sur un banc d'essai, mais à faible vitesse, on peut facilement les arrêter à la main.
Je suis très déçu et j'ai quelques scrupules d'avoir conseillé ces contrôleurs à Dakota.
Je ne vais pas abandonné ce projet. Je vais changé de contrôleurs pour ceux que j'avais acheté au début, https://www.robot-ma...board/?p=115679, je ne les avais pas utilisé car les ZS-X11H me semblaient plus simple d'utilisation.
Tout ceci est très frustrant.
Le coté positif, c'est que la structure globale du robot et le programme me semblent satisfaisants. La seule chose à changer, c'est le contrôleur.
Je vais tout remettre à plat. Mon objectif, c'est de faire tourner le moteur, très doucement, sans pouvoir l'arrêter avec ma main.
Pour cette fin d'année et début d'année prochaine, je vais être obligé de lever le pied, mais qui sait, peut-être qu'à temps perdu je vais quand même avancer.
Désolé, Dakota, vraiment.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#150
dakota99
-
- Membres
-
- 253 messages
Habitué
- Gender:Male
- Interests:programmation Windev, Webdev, aviation, robotique, domotique, drones
Posté 10 décembre 2022 - 02:17
Oracid, dommage que tu sois déçu. 
Je suis étonné car avec les anciens contrôleurs (qui n'ont pas de frein) j'avais été étonné par le couple développé par le moteur même à basse vitesse.
Cela me convenait assez bien.
Mais bon je ne sais pas encore comparer étant donné que je n'arrive pas à faire fonctionner les nouveaux.
Si tu le souhaites je peux t'en envoyer un par la poste pour que tu testes.
Je te dois bien ça pour tout le temps que tu as passé à m'aider .
#151
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 décembre 2022 - 03:13
Si tu le souhaites je peux t'en envoyer un par la poste pour que tu testes.
Je te dois bien ça pour tout le temps que tu as passé à m'aider
C'est avec plaisir, quand je peux aider.
J'ai déjà ce type de contrôleur, mais merci quand même.
L'objectif, pour moi, c'est de monter des escaliers et de pouvoir déplacer 100kg, voir 200kg, à petite vitesse.
N'hésite pas, continue à questionner, je te répondrai avec plaisir.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#152
Mike118
-

- Administrateur
-
- 10â¯314 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 décembre 2022 - 03:33
Ce matin, j'ai décidé de faire les premiers tests en extérieur, sur ma terrasse.
Malheureusement, les tests ont été très décevants. En ligne droite, le robot avance et recule, sans problème.
Mais dès que je veux le faire tourner, il n'a pas assez de puissance pour compenser la forte adhérence du caoutchouc des roues.
En fait, il n'a aucune puissance, je l'arrête à la main sans aucun problème.
Les contrôleurs ZS-X11H ne délivrent aucune puissance. Ils font illusion, car les moteurs tournent bien sur un banc d'essai, mais à faible vitesse, on peut facilement les arrêter à la main.
Je suis très déçu et j'ai quelques scrupules d'avoir conseillé ces contrôleurs à Dakota.
Je ne vais pas abandonné ce projet. Je vais changé de contrôleurs pour ceux que j'avais acheté au début, https://www.robot-ma...board/?p=115679, je ne les avais pas utilisé car les ZS-X11H me semblaient plus simple d'utilisation.
Tout ceci est très frustrant.
Le coté positif, c'est que la structure globale du robot et le programme me semblent satisfaisants. La seule chose à changer, c'est le contrôleur.
Je vais tout remettre à plat. Mon objectif, c'est de faire tourner le moteur, très doucement, sans pouvoir l'arrêter avec ma main.
Pour cette fin d'année et début d'année prochaine, je vais être obligé de lever le pied, mais qui sait, peut-être qu'à temps perdu je vais quand même avancer.
Désolé, Dakota, vraiment.
Cela ne va pas t'aider pour monter des escaliers ... Mais à minima tu peux te dire que les solutions que tu as sont utilisables dans le cadre d'un 2 roues motrices avec des roues folles ...
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#153
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 décembre 2022 - 07:24
Cela ne va pas t'aider pour monter des escaliers
Faut voir. J'ai déjà vu des UGV monter des escaliers, donc j'ai bon espoir. Aujourd'hui, le robot peut à peine porter son propre poids.
Faire un 2 roues, ou un 4 roues, sur un terrain lisse, je l'ai déjà fait en Lego.
Non, là, je voulais passer à une autre échelle, 100kg. C'est parfaitement faisable, il n'y a qu'à voir les vidéos sur YouTube.
Mais, je n'ai pas dit mon dernier mot.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#154
dakota99
-
- Membres
-
- 253 messages
Habitué
- Gender:Male
- Interests:programmation Windev, Webdev, aviation, robotique, domotique, drones
Posté 10 décembre 2022 - 09:58
J'ai un peu progressé (sans crier victoire trop vite...)
J'ai regardé le filtre à l'oscillo. On a des pulses avant et un courant bien continu après.
Le problème était que je ne pouvais pas régler la vitesse et pourtant la tension à la sortie du filtre avait l'air correcte (1V)
Si je ne raccorde pas le fil Start / stop alors cela fonctionne. Quand il est raccordé on mesure 5v sur la pin Signal et donc la roue tourne à fond les manettes. Quand j'enlève ce fil la tension sur la pin signal est la tension demandée.
De plus le frein fonctionne. Suffisamment pour arrêter l'engin qui roule à bonne vitesse avec une charge ? A vérifier

On n'a pas les mêmes exigences, (dans mon cas c'est 2 roues motrices avec 2 roues folles) mais le couple est assez impressionnant. Je ne sais pas si c'est suffisant pour monter des escaliers avec une belle-mère assise dessus.. mais à pleine puissance sur 4 roues motrices en 36V ça doit quand même envoyer.
@Oracid : Quand tu mets plein pot tu as bien 5V sur la pin signal ?
#155
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 11 décembre 2022 - 07:55
Quand il est raccordé on mesure 5v sur la pin Signal et donc la roue tourne à fond les manettes. Quand j'enlève ce fil la tension sur la pin signal est la tension demandée.
Cela est très surprenant ! A l'occasion, je vérifierais si j'ai la même chose.
De toute façon, la pin Start/Stop ne sert à rien. En Stop, on est en roue libre. Cela revient à envoyer un signal à 0V.
Si vraiment tu veux arrêter le robot, il faut utiliser le frein.
à pleine puissance sur 4 roues motrices en 36V ça doit quand même envoyer.
Oui, bien sûr, mais le problème, c'est qu'il faut aller doucement. Et, à faible vitesse, il n'y a plus de couple.
Ce que je veux, c'est du couple à faible vitesse. Sur un Hoverboard, un homme de 80kg, même à très faible vitesse, avance et tourne sans problème.
@Oracid : Quand tu mets plein pot tu as bien 5V sur la pin signal ?
Non, j'ai 3V.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#156
dakota99
-
- Membres
-
- 253 messages
Habitué
- Gender:Male
- Interests:programmation Windev, Webdev, aviation, robotique, domotique, drones
Posté 11 décembre 2022 - 08:58
Ce que je veux, c'est du couple à faible vitesse. Sur un Hoverboard, un homme de 80kg, même à très faible vitesse, avance et tourne sans problème.
J'ai exactement la même préoccupation. Faire des manoeuvres lentes et précises avec de la charge. Comme sur un siège PMR
J'avais posé une question similaire sur un forum et j'ai compris qu'il faut un asservissement de vitesse.
Si le robot ne se déplace pas à la vitesse souhaitée, on augmente la puissance jusqu'à ce qu'il bouge.
Il faut donc lire les valeurs des encodeurs et adapter la puissance pour obtenir la vitesse souhaitée ?
C'est juste on je raconte des bêtises ? Ou il y a moyen de faire autrement ?
#157
Sandro
-

- Modérateur
-
- 1â¯346 messages
Membre chevronné
- Gender:Male
Posté 11 décembre 2022 - 11:30
Ce que je veux, c'est du couple à faible vitesse. Sur un Hoverboard, un homme de 80kg, même à très faible vitesse, avance et tourne sans problème.
J'avais posé une question similaire sur un forum et j'ai compris qu'il faut un asservissement de vitesse.Si le robot ne se déplace pas à la vitesse souhaitée, on augmente la puissance jusqu'à ce qu'il bouge.
Il faut donc lire les valeurs des encodeurs et adapter la puissance pour obtenir la vitesse souhaitée ?
C'est juste on je raconte des bêtises ? Ou il y a moyen de faire autrement ?
@Oracid, quand tu dis que tu n'as pas de couple à faible vitesse, tu entends que tu n'as pas de couple à faible PWM, ou pas de couple à faible vitesse de rotation de la roue?
Si jamais c'est pas clair, il n'y a aucune correspondance entre vitesse de rotation et PWM à priori. Si tu coince ta roue dans un étau, tu peux mettre un PWM de 100%, et ta roue ne tournera pas. Inversement, si ta roue tourne dans le vide, alors un tout petit PWM suffit pour la faire tourner. On peut même aller encore plus loin : si tu forces assez, tu peux mettre un PWM de 100% vers l'avant, tout en forçant la roue (de manière externe) à tourner en arrière. NB : n'essayez pas en pratique de bloquer des roues ou de les faire tourner dans le mauvais sens avec un PWM de 100% : beaucoup de moteurs vont surchauffer puis cramer.
Autrement dit, le PWM et la vitesse ne sont liés (environ proportionnels) que si le couple résistif (ie la "force" qui s'oppose au mouvement) est constante.
Tant que le couple résistif est faible, l'approximation vitesse = constante * PWM indépendamment du terrain est à peu près valable (pour vous faire une idée, comparez la vitesse à vide du moteur et la vitesse nominale (ie avec le couple nominal) : en général, la différence est <20%, donc jusqu'au couple nominal, l'erreur reste <20%. Si vous avez besoin ponctuellement de plus de couple, alors la vitesse s’effondre.
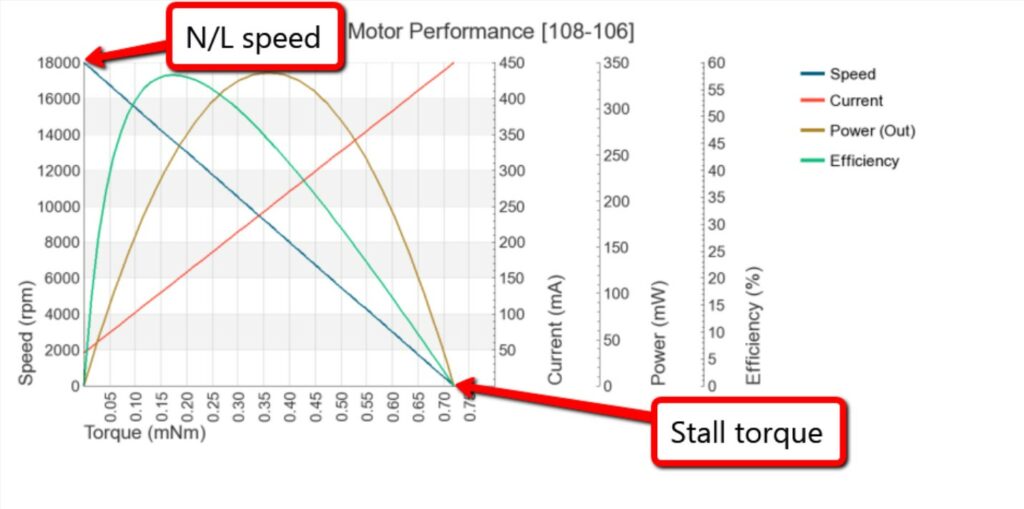
(source : https://www.precisio...ives.com/ab-032 )
Donc pour résumer, tant que votre robot vas en ligne droite (ou léger virage) sur un sol plat, vous pouvez considérer sans trop d'erreur que le PWM est proportionnel à la vitesse.
Par contre, dès que ce n'est plus le cas (sol pas plat/lisse, pentes, virages serrés ou sur place (surtout avec roues rugueuses), ...), alors l'approximation ne tient plus (du tout).
Et là, la seule solution est d'utiliser un asservissement en vitesse, c'est à dire de corriger le PWM en fonction de l'erreur de vitesse.
Soit vous pouvez acheter un driver qui gère ça en interne (dans ce cas, vous lui envoyez directement une vitesse et pas un PWM), mais c'est souvent assez cher. Ou alors, vous lisez vous même la vitesse (soit à partir d'encodeurs externes, soit à partir des signaux des capteurs hall, soit (peut-être) à partir de la sortie speed de votre driver), puis vous calculez le PWM que vous voulez envoyer (je vous suggère d'utiliser un contrôleur PI (ou PID)).
Donc @Oracid : si à pleine vitesse tu as un couple satisfaisant, alors à faible vitesse de rotation, tu aura au moins autant de couple disponible, probablement même un peu plus. En revanche, à faible PWM, tu n'aura pas beaucoup de couple. Donc si tu confirmes que ce n'est qu'à faible vitesse que tu manques de couple, alors il n'y a aucun problème avec ton driver, il te faut juste modifier ton code pour ajouter un contrôleur en vitesse
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#158
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 11 décembre 2022 - 09:45
Merci Sandro, pour ton exposé. Je pense comprendre ce que tu dis, mais malheureusement cela ne fonctionne pas.
Sur le robot, j'ai installé un potentiomètre qui me permet de paramétrer le PWM. C'est vrai que je n'ai jamais été jusqu'à 255, mais plutôt 150. Le fait est que cela me fait un peu peur.
Une fois le PWM réglé, je lance le robot. En ligne droite, pas de problème, mais pour tourner sur place tout est bloqué.
Alors, avec ma radiocommande, je remplace le contrôleur qui gèrerait le couple en fonction de la vitesse, tout simplement en accélérant.
Même si j'ai installé un disjoncteur, j'évite quand même de faire chauffer le moteur. Donc, si au bout d'une seconde, ça bloque encore, et bien je relâche tout.
Je ne sais pas si je suis très clair.
En résumé, avec ma radiocommande, en accélérant, je pense faire exactement ce que ferait un contrôleur intelligent.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#159
Sandro
-
- Modérateur
-
- 1â¯346 messages
Membre chevronné
- Gender:Male
Posté 11 décembre 2022 - 10:53
Sur le robot, j'ai installé un potentiomètre qui me permet de paramétrer le PWM. C'est vrai que je n'ai jamais été jusqu'à 255, mais plutôt 150. Le fait est que cela me fait un peu peur.
Une fois le PWM réglé, je lance le robot. En ligne droite, pas de problème, mais pour tourner sur place tout est bloqué.
Alors, avec ma radiocommande, je remplace le contrôleur qui gèrerait le couple en fonction de la vitesse, tout simplement en accélérant.
Même si j'ai installé un disjoncteur, j'évite quand même de faire chauffer le moteur. Donc, si au bout d'une seconde, ça bloque encore, et bien je relâche tout.
Je ne sais pas si je suis très clair.
En résumé, avec ma radiocommande, en accélérant, je pense faire exactement ce que ferait un contrôleur intelligent.
Désolé, j'ai un peu de mal à te suivre. Tu décris un seul montages ou deux différents (l'un avec potentiomètre + un mécanisme de départ, l'autre avec la radiocomande).
Si tu es en mode télécommandé, alors en effet, tu peux faire l'asservissement manuellement (ie tu vois que le robot ne vas pas assez vite, donc tu accélères.
Après, pour ta télécommande, est-ce que tu es sur qu'elle te génère un PWM classique (pour commander un controleur moteur) et pas un PWM de type servo-moteur (où le max ne correspond qu'à 2ms/20ms = 10%)?
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
#160
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 décembre 2022 - 08:54
Je ne mets pas tout le code, pour simplifier.
Dans la fonction setup(), je lis un potentiomètre : Speed = map(analogRead(POT),0,1023,0,255);
Dans la fonction loop(), j'appelle ma fonction RC(), puis la fonction Go().
void RC() { // Radio control
delay(10);
c2 = pulseIn(A2,HIGH,25000); // receiver channel 2 getting value Forward and Backward
c1 = pulseIn(A1,HIGH,25000); // receiver channel 1 getting value turn Left and Right
if (c1==0 | c2==0) { DBG(2); delay(500); resetFunc();} // if RC off then reset
T = map(c1,970,1970,0,90);
R = map(c2,970,1970,Speed,-Speed);
L = map(c2,970,1970,Speed,-Speed);
if ( R < 0 ) {digitalWrite(DIR_OUT_R, HIGH);} else{digitalWrite(DIR_OUT_R, LOW);} // Backward right wheels
if ( L < 0 ) {digitalWrite(DIR_OUT_L, LOW);} else{digitalWrite(DIR_OUT_L, HIGH);} // Backward left wheels
R=R*cos(T*PI/180); // turn right
L=L*sin(T*PI/180); // turn left
R = abs(R); L = abs(L);
if(R<=20 & L<=20 & T <= 10){R=Speed;L=Speed;digitalWrite(DIR_OUT_R, LOW);} // turn right on a spot
if(R<=20 & L<=20 & T >= 80){R=Speed;L=Speed;digitalWrite(DIR_OUT_L, HIGH);} // turn left on a spot
}
void Go(){
for( int i=0;i<=300;i++){
analogWrite(PWM_OUT_R,R); // write PWM value to output with LowPass Filter
analogWrite(PWM_OUT_L,L); // write PWM value to output with LowPass Filter
}
}
Pour les valeurs du signal de radiocommande, j'utilise les valeurs 970us à 1970us, au lieu de 1000us à 2000us.
A une époque, j'avais dû déterminer que c'était les valeurs min et max que ma radiocommande.
Mais on s'en fiche.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet







0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




