

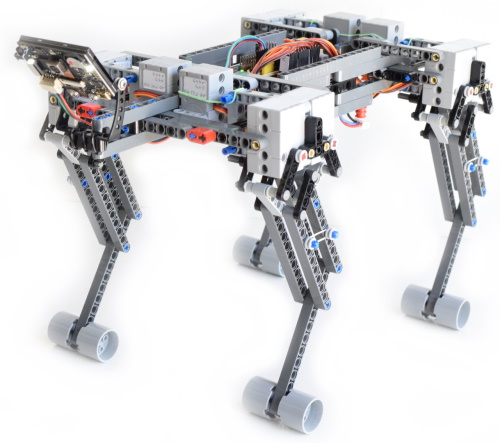
Voici un nouveau quadrupède. Sa particularité est qu'il est est basé sur des servos 360° de GeekServo, https://www.robot-ma...-le-programmer/
Ces servos sont excellents, et de plus, compatibles Lego. De ce fait, ce quadrupède est sans doute le plus facile à réaliser de ma collection.
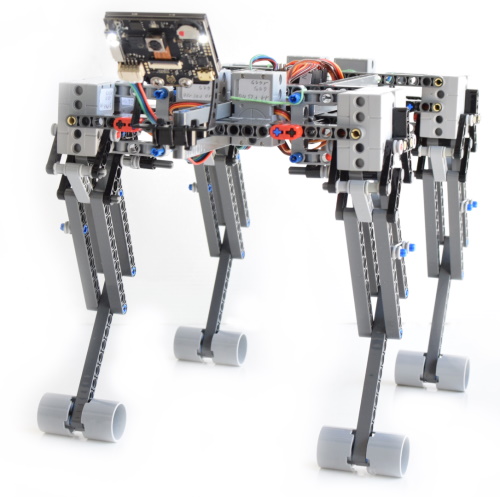
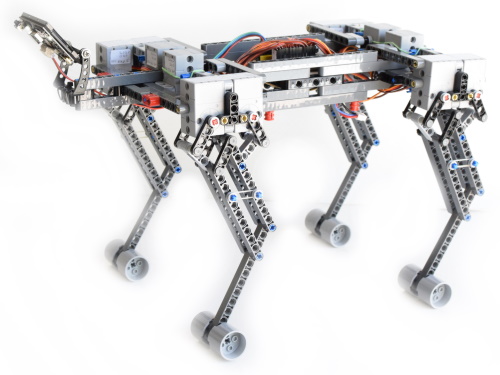
Bien qu'il soit assez petit, c'est bien un 12DOF ! Avec ces servos, difficile de faire plus grand.
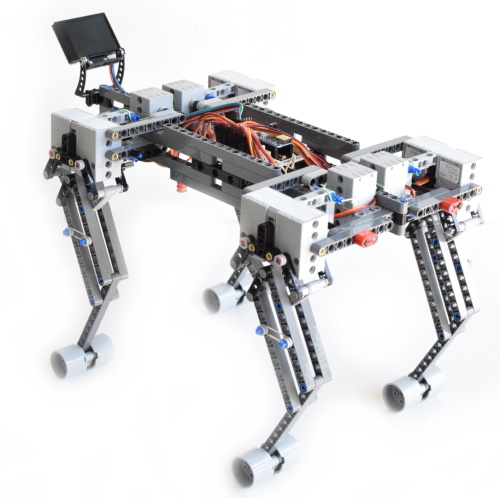
Il va à la vitesse de 1m par seconde, ce qui est très bien, en considérant que c'est un 12DOF et non pas un 8DOF, soit le poids de 4 servos supplémentaires.
Notez la présence d'élastique sur chaque patte(merci Sandro). J'ai eu quelques difficultés en raison d'une grosse différence de force d'un élastique à l'autre. Mais j'ai eu l'idée de commander des élastiques d'orthodontie. Leur qualité est nettement supérieure et leur force constante. L'objectif est d'utiliser un minimum d'élastiques permettant de garder le quadrupède debout, hors tension.
Comme vous pouvez le voir sur les photos, il est pourvus du module Huskylens, https://www.robot-ma...ylens/?p=115607
A la prochaine TRR, j'espère bien le faire concourir sur le grand circuit réservé au roulants.
Je ne l'ai pas encore testé en tant que suiveur de ligne. Je commencerai les tests après mes vacances et j'espère bien faire une vidéo.
Ce sera peut-être mon dernier quadrupède. J'ai échoué dans la conception d'un grand quadrupède et je ne vois pas quelle pierre supplémentaire je pourrais ajouter à l'édifice.
Aujourd'hui, je suis impatient de me consacrer entièrement à mon projet d'UGV, https://www.robot-ma...ou-dhoverboard/
















