
Bonjour à tous,
En ce moment je travaille sur un projet de robot quadrupède utilisant 12 servos de type MG995.
Je suis débutant en robotique.
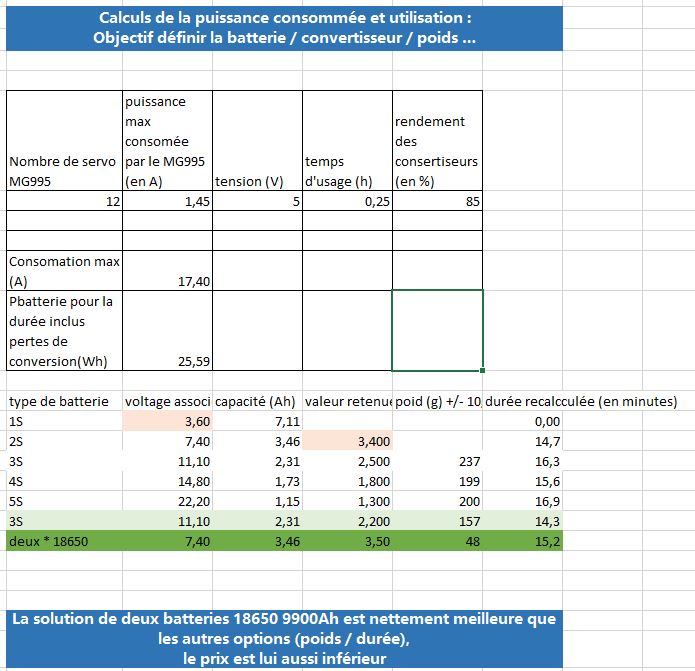
En consultant différents pages sur le net je suis tombé sur le blog de Briel. Très bien fait, il m’a permis de réaliser mes calculs de puissance. Je me suis orienté vers le choix de 2 abaisseurs de tension de type LTC3780 pour faire face au 17A en pointe que peuvent nécessiter les 12 servos MG995 de mon projet. Finalement l’architecture de l’électronique est relativement proche de celle Briel.
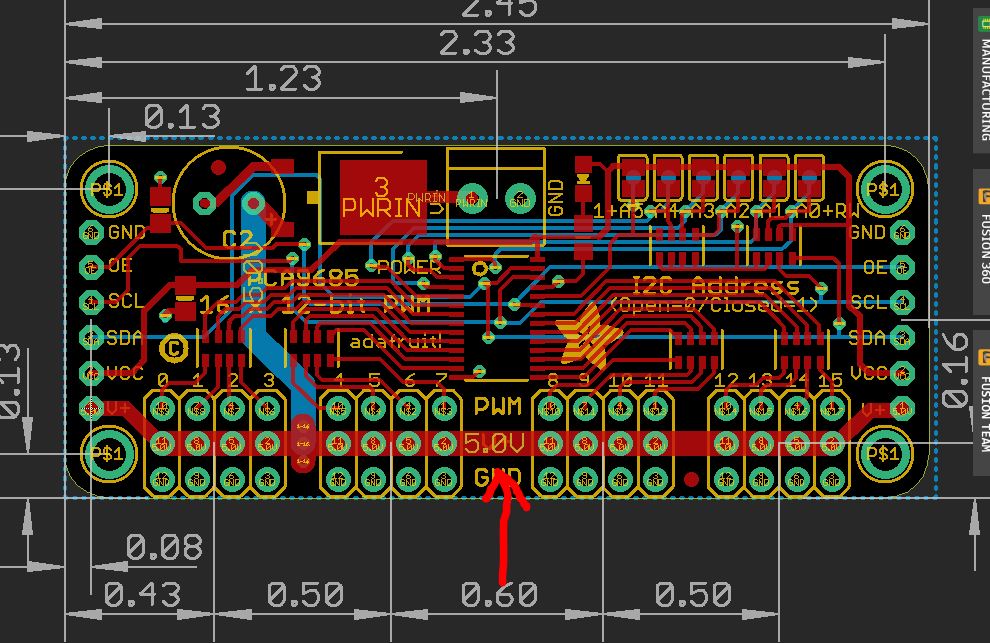
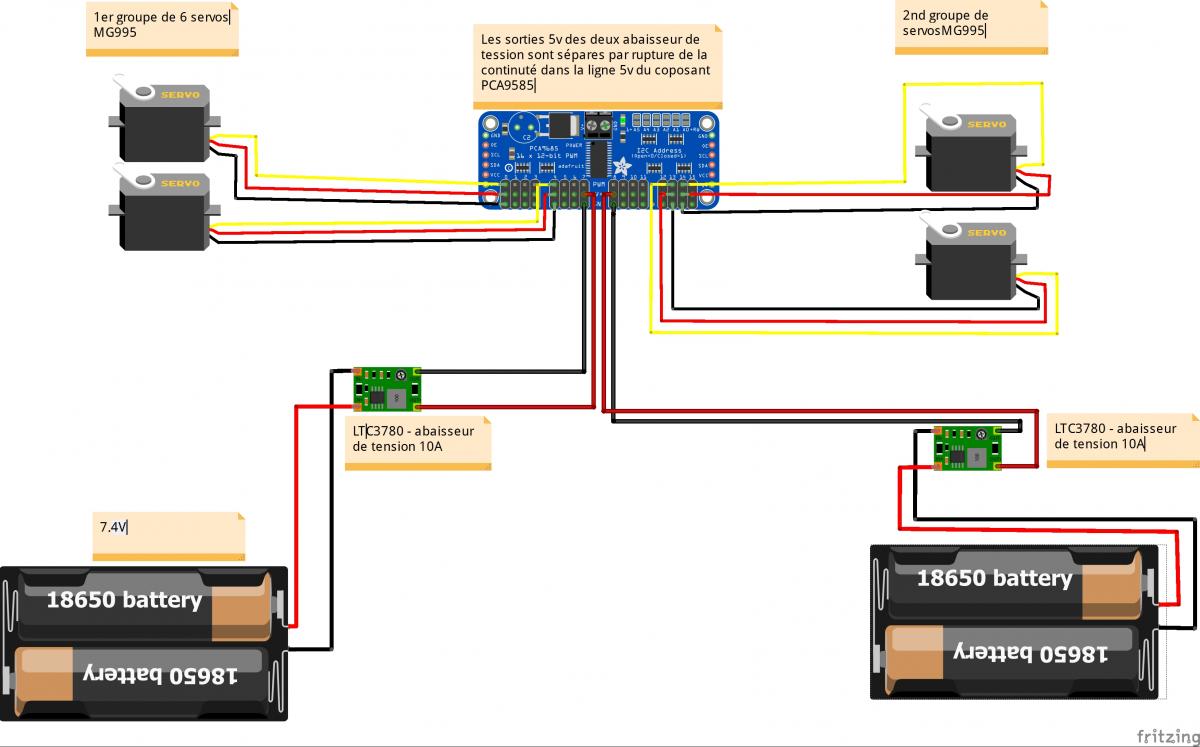
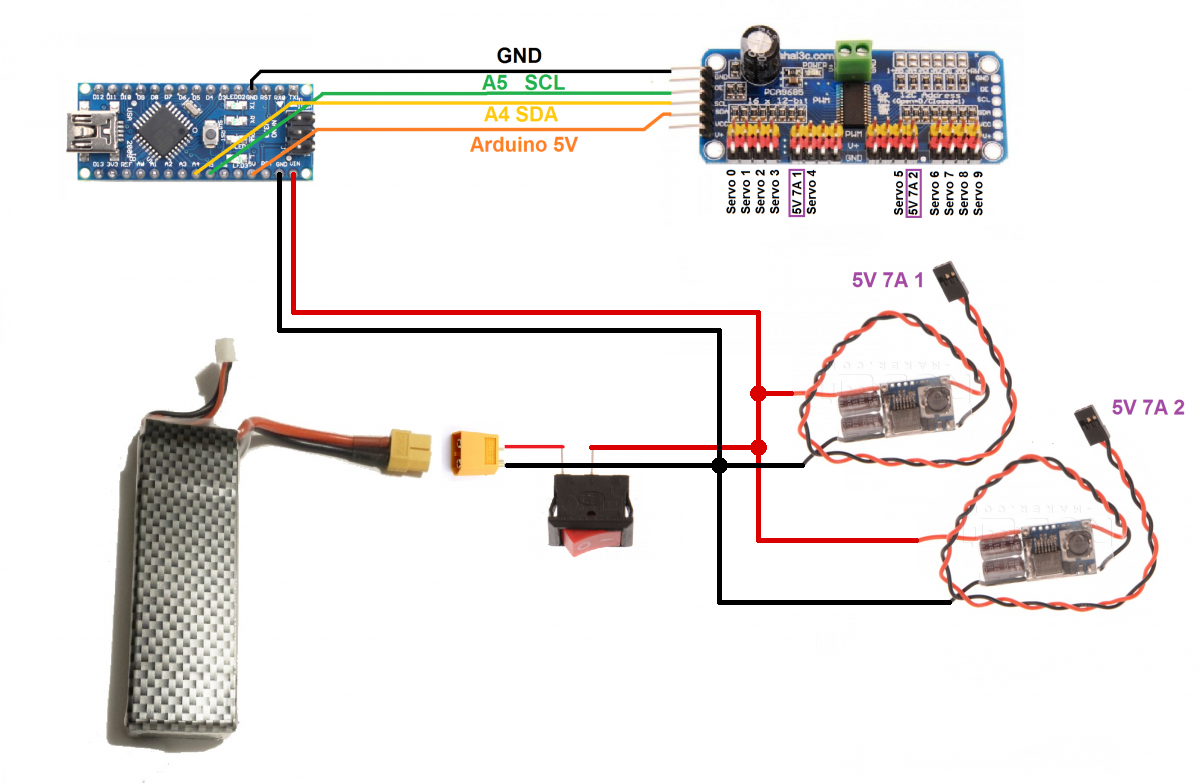
En regardant de plus près les connexions entre les deux abaisseurs de tension et le contrôleur de servo (PCA9685) je vois que le branchement comme vous l’avez réalisé dans Briel a deux effets (cette analyse est soutenue par l’échange suivant ; le câblage interne du PCA9685) :
ü Premièrement, il vient connecter les deux bornes positives des deux Convertisseur 5V 7A dans votre cas (et des deux LTC3780 dans mon cas)
ü Deuxièmement il contourne le composant qui se trouve entre le bornier de puissance de PCA9685, (je pense que ce composant est un transistor D417 pour les cartes adafruit) et la borne positive des servos.
Ma question de fonds est « est-ce vraiment important ? »
Pour ce qui est de la connexion en parallèle de deux abaisseurs de tension, il semble que ça ne soit pas vraiment bon (exemple)
Pour ce qui est du contournement du transistor on ôte une protection qui est vraisemblablement déjà assurée par le régulateur de tension.
Dans le doute que pensez-vous des options suivantes (éventuellement cumulative) ?
ü Connecter les bornes positives des deux lots de servo des manières indépendantes (les masses elles seront toujours connectée ensemble). Proposition de mise en œuvre pour Briel (et mon projet  ) entailler la plaque du PCA9685 entre les connexions des servo4 et servo5 (cfschéma de Briel). On créé ainsi 2 circuits et les 2 abaisseur de tension de sont plus en parallèle.
) entailler la plaque du PCA9685 entre les connexions des servo4 et servo5 (cfschéma de Briel). On créé ainsi 2 circuits et les 2 abaisseur de tension de sont plus en parallèle.
ü Remettre un transistor D417 entre l’abaisseur de tension et le PCA9685
Un grand merci pour avoir lu jusqu’ici !
Merci d'avance pour vos commentaires éclairés.
Très bonne journée
Valentin





 et je suis très largement en phase avec ce qu'il a écrit
et je suis très largement en phase avec ce qu'il a écrit 













{kind=link}