Bonjour,
Je me lance dans la réalisation d'un bras robot. Conception et réalisation à suivre.
L'objectif est de pouvoir monter le bras sur une base roulante de ce type : https://www.robot-ma...board/?p=117964
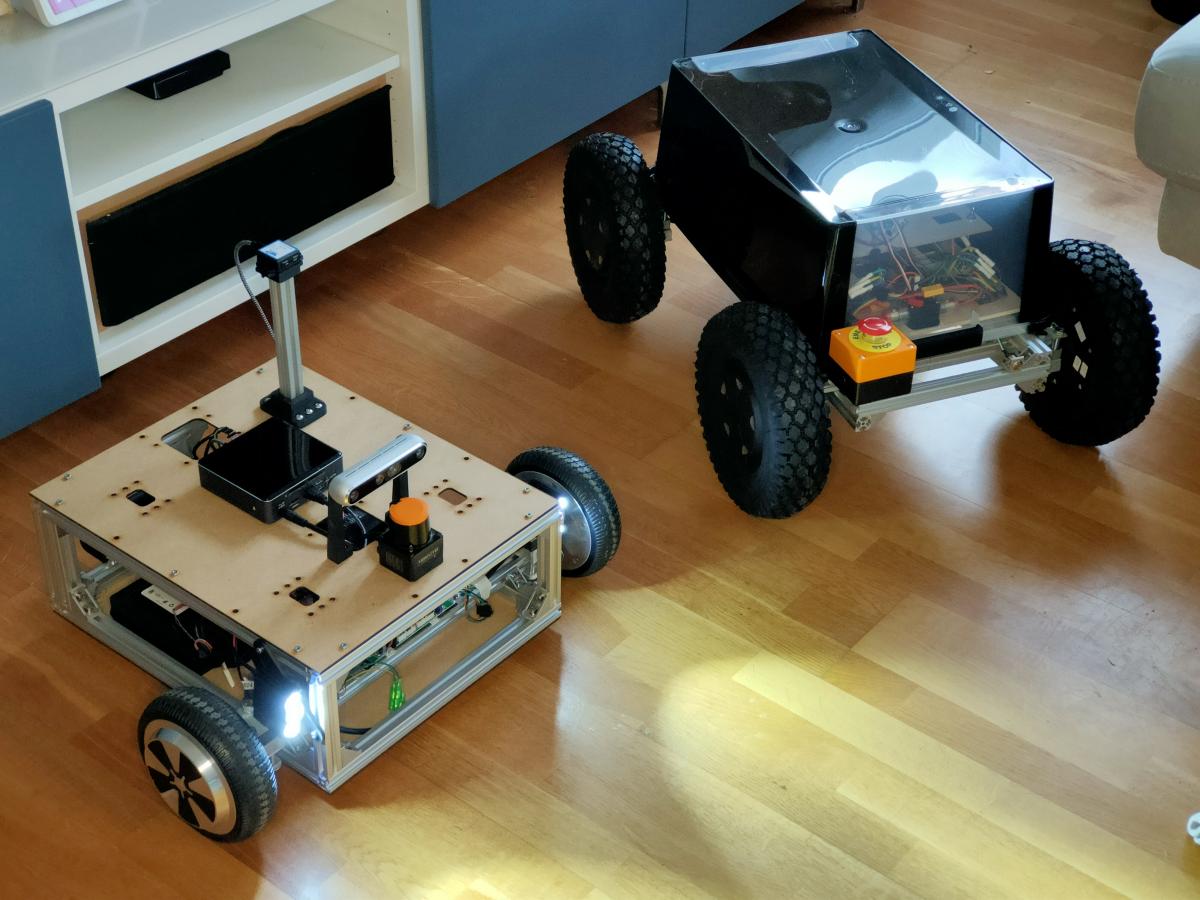
gauche : projet personnel de robot hoverboard, droite : 4x4 d'Oracid
Pas de but précis en termes d'applications. Juste l'idée d'étendre l'emploi de ROS2 au contrôle du bras, en plus de celui de la base roulante.
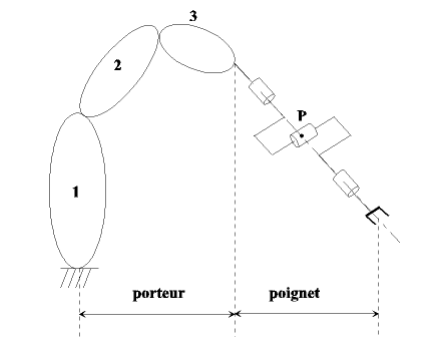
La capacité à manipuler des objets de petite taille de l'ordre de 100 à 500g avec 6 degrés de liberté est l'un des critères.
Je vais certainement m'inspirer des réalisations connues (BCN3D MOVEO, THOR, AR3/4..)
Patrick.