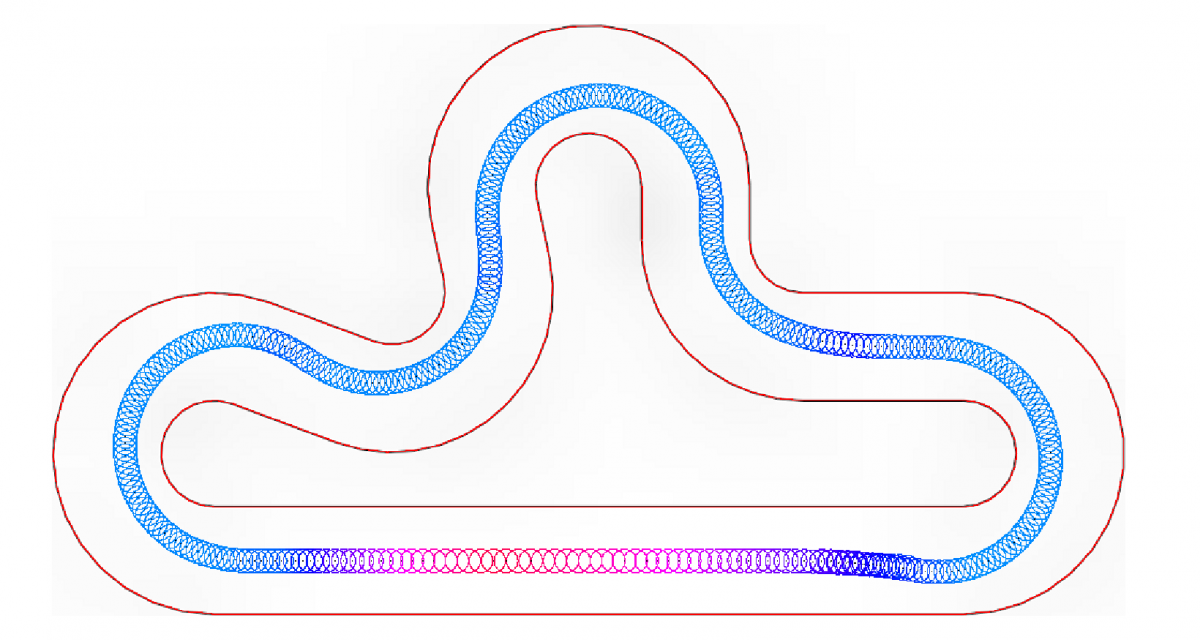
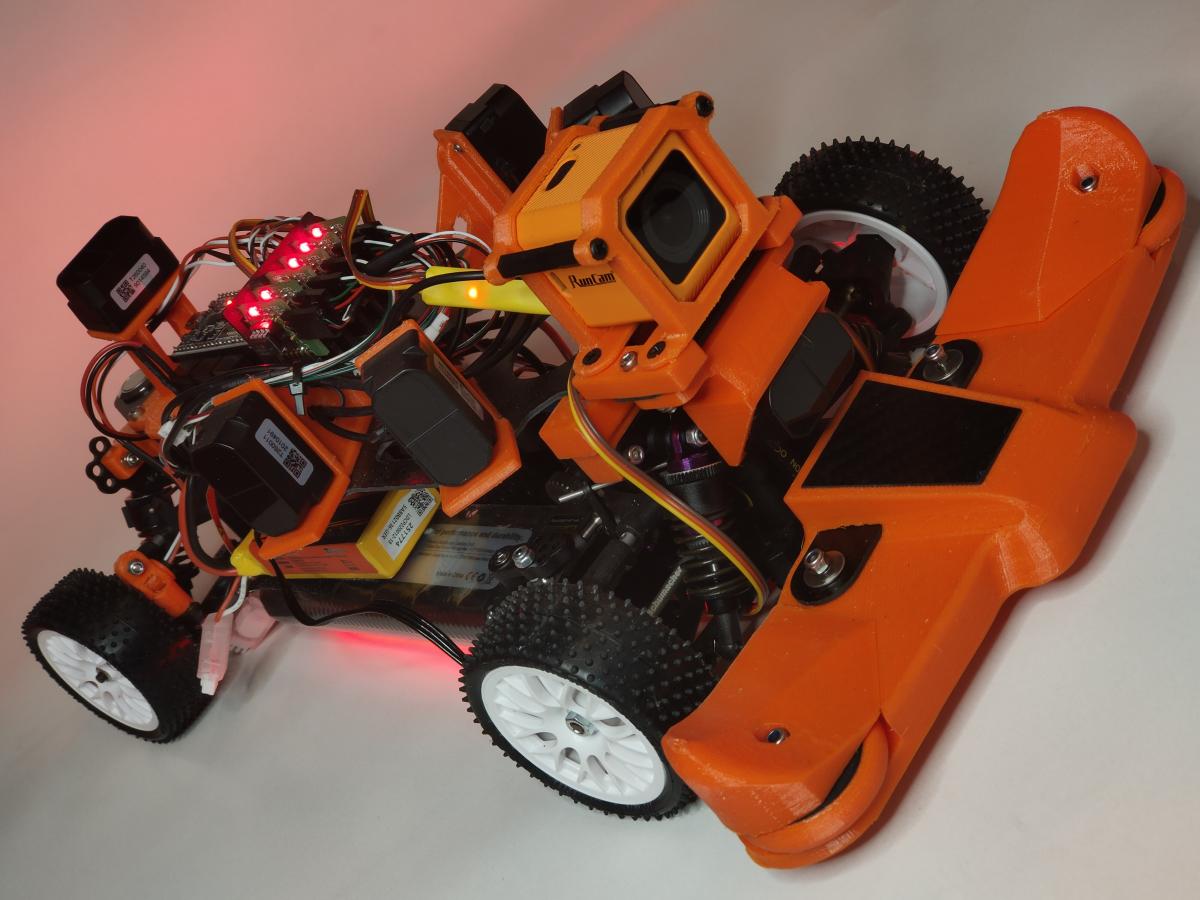
Voici quelques informations au sujet de la voiture "Phoenix" qui a participée à la Tiny TRR 2023 dans la catégorie Roulant. Ce robot a obtenu le second temps, et il s'agit d'une évolution de la mini-traction rouge de l'année 2022 (voir https://www.robot-ma...-tiny-trr-2022/).
Avant la course :
Fin de la course :

Par rapport à la mini-traction de l'année précédente, le chrono s'est légèrement amélioré avec un gain de l'ordre 0.5 sec par tour (9 secondes en moyenne), à puissance moteur égale.
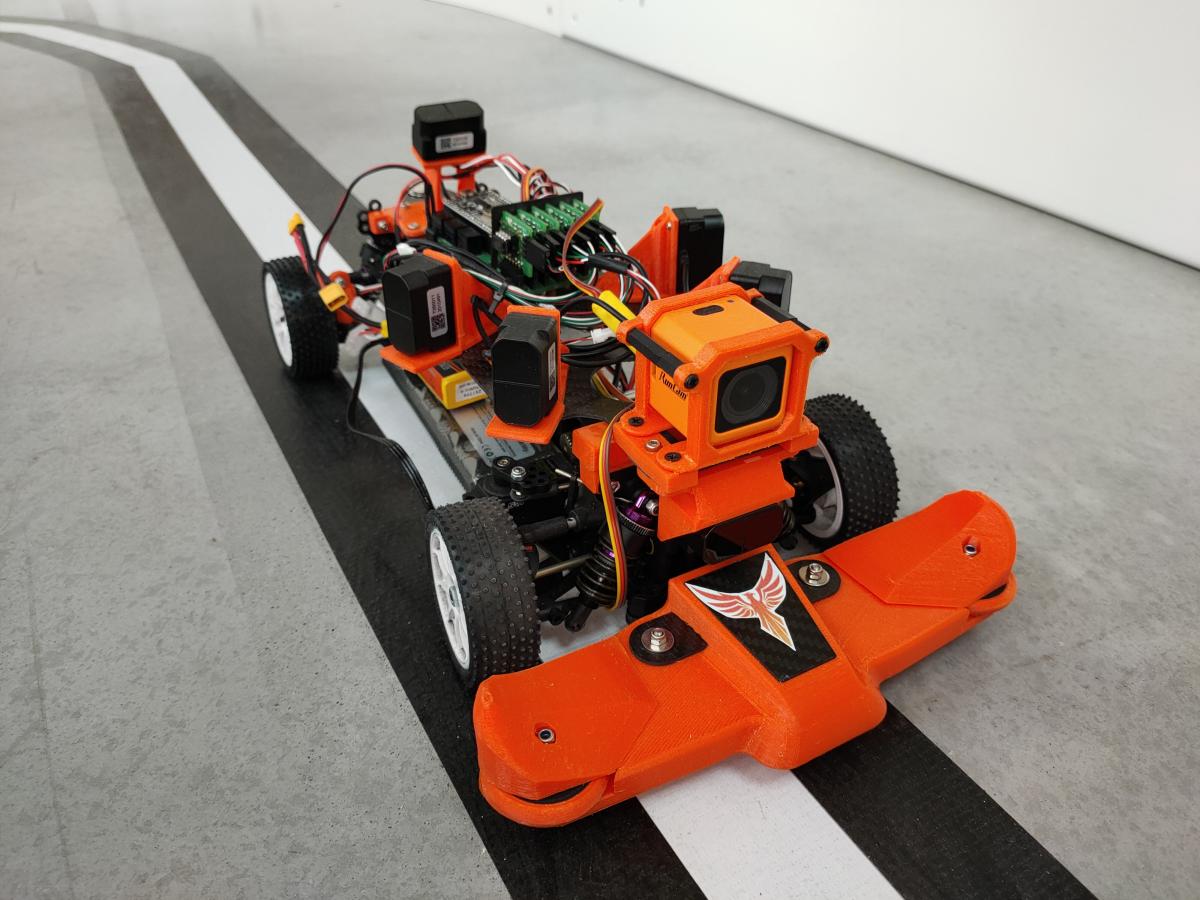
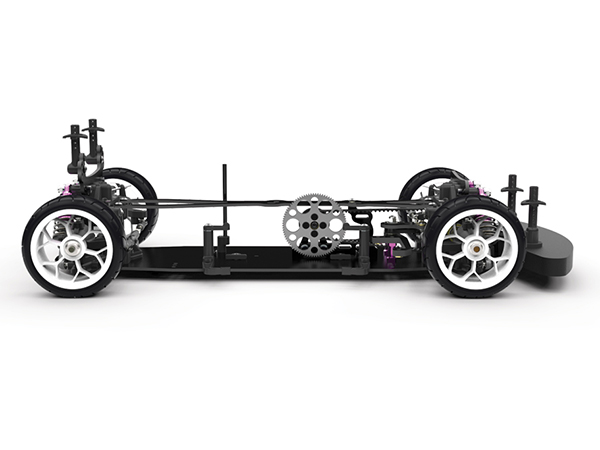
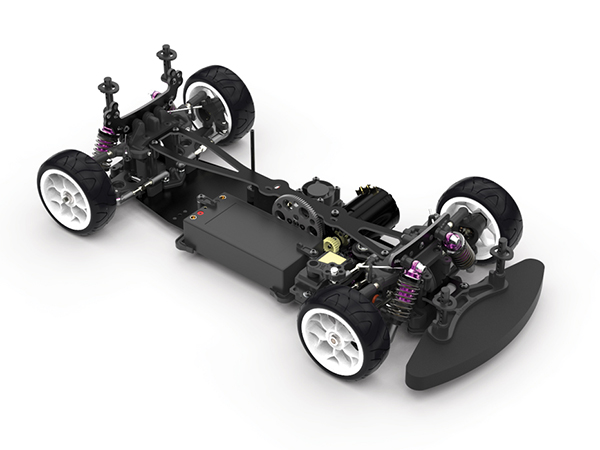
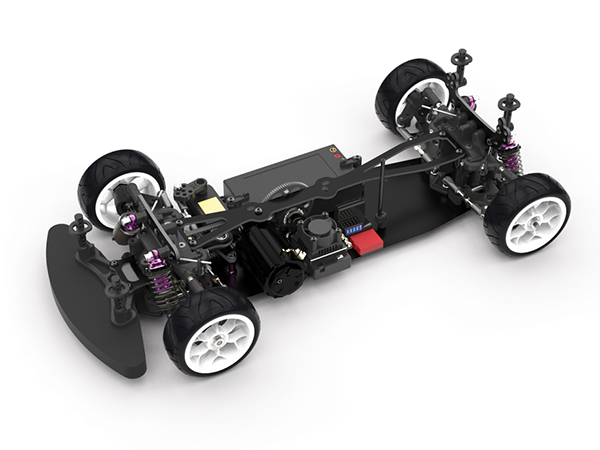
Pour le châssis, il s'agit d'un kit 1/10eme piste semi compétition "Schumacher Mission FT S2", traction avant, équipé d'un moteur à charbons "Tamiya Torque Tuned" et d'un variateur gaz/frein de base. L'objectif est toujours de maximiser l'agilité dans les virages et lacets de la Tiny TRR.
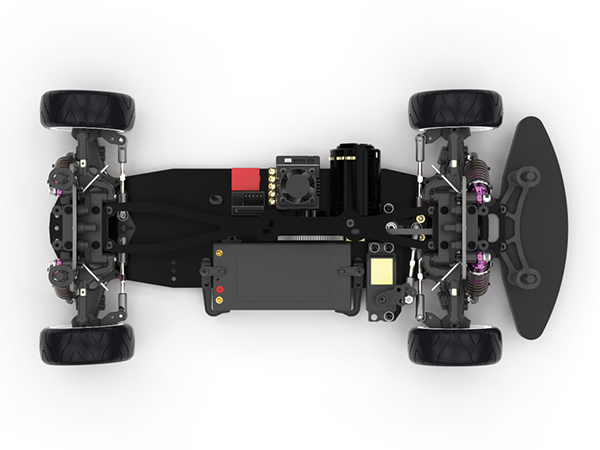
Quelques astuces sur les réglages mécaniques sur une piste dure en intérieur :
- Garde au sol réduite,
- Pignon moteur avec un nombre de dents intermédiaire à petit (le couple au détriment de la vitesse de pointe)
- Pneus à picots gomme medium
- Pincement du train avant réglé sur une légère ouverture (angle négatif) pour les performances en virage au détriment de la stabilité en ligne droite,
- Points d'ancrage des biellettes de direction les plus proches de l'axe de rotation des fusées (braquage maximum)
- Servo direction ultra-rapide HV, branché directement sur le 7.4V de l'accus de propulsion (ex. : SRT Servo Coreless Low-Profile 12Kg 0.06sec CH6012)
- Parechoc avant "maison" doté de roulettes.


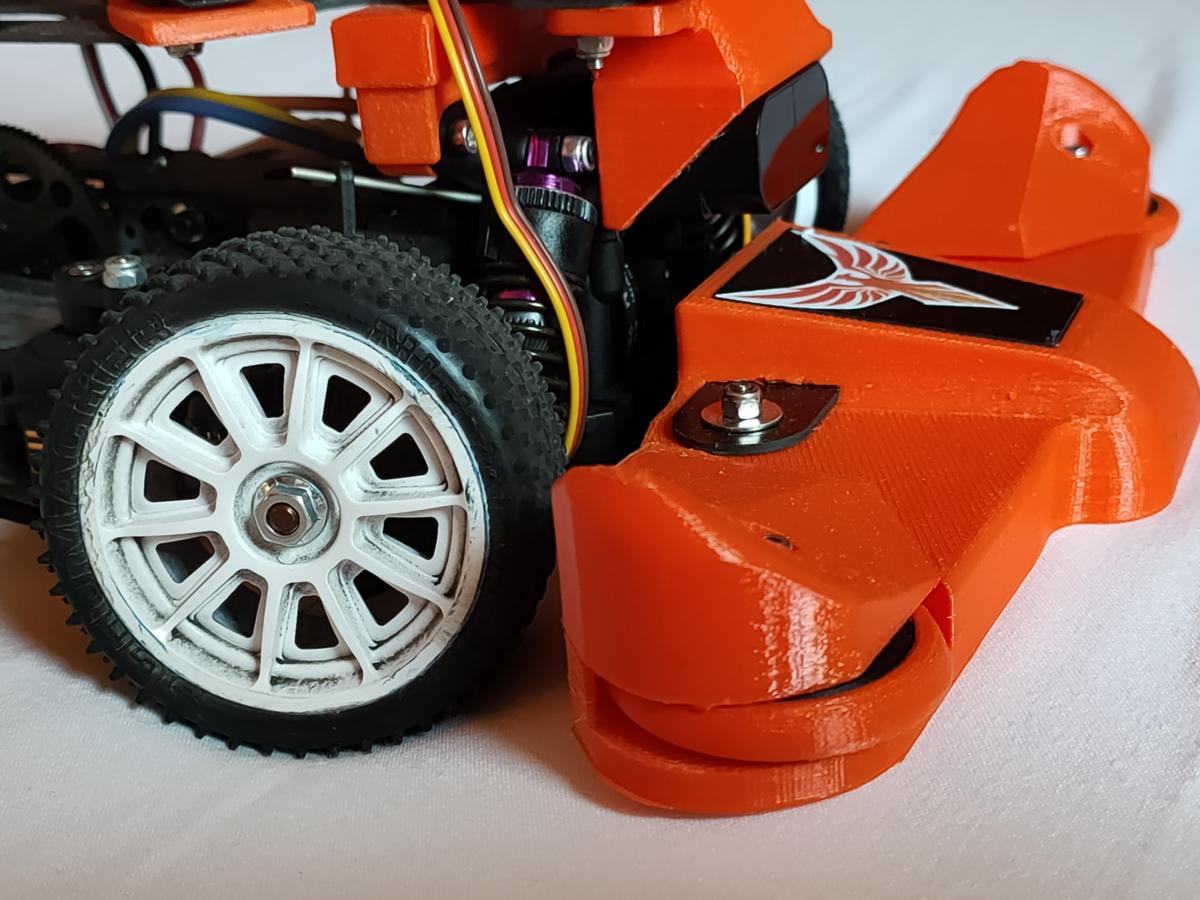

On obtient un rayon de braquage de 40 cm a basse vitesse. La masse totale avec l'électronique et les accus est de 1.6Kg avec un centre de gravité légèrement porté sur la droite du robot. La vitesse de pointe est de l'ordre 4.5m/s avec une accélération (réelle sur la piste en course) de 2.5m/s² et une décélération de 4m/s. La commande de direction est quasi instantanée. Enfin, le parechoc sauve le robot en cas de collision quasi frontale et c'est arrivé pendant l'épreuve.
Avec cette configuration mécanique, le robot parvient à prendre l'intérieur des virages. Sur la vidéo suivante, on voit le robot en évolution, et je m'aperçois que l'algorithme de conduite est vraiment perfectible avec notamment un gros soucis pour négocier correctement le dernier virage (et ca ne vient pas d'un probleme d'adhérence ou mécanique).
Voila pour la mécanique ! En échangeant avec les Mike notamment pendant la course, il m'a semblé utile de donner quelques détails sur les réglages de la voiture. Je ne suis pas bon pilote de voiture R/C et le sujet est assez complexe. La meilleure solution est donc de chercher les fiches de réglages de son modèle, proposées par des passionnés et des compétiteurs et de s'en inspirer pour régler au mieux sa voiture pour la piste de la TRR (rapport de transmission, huiles différentiel et amortisseur, réglages de pincement, carrossage...). Exemple : https://site.petitrc...afford20220522/
D'autres évolutions aux niveaux électronique et logiciel seront décrites dans les messages suivantes.
A suivre !