Bonjour à tous,
Cette année je participe à nouveau à la coupe de France de robotique, mais cette année je recommence avec une nouvelle équipe composée de
pat92fr hdumcke (que j'ai tous les deux rencontré lors de la TRR ) et moi même.
Pat à choisi le le nom de Marst Attacks! en référence au film éponyme, et par ce que le thème de l'année 2024 du règlement de la coupe de france de robotique, c'est " Farming Mars ". Il a été dévoilé en septembre 2023.
C'est la première participation de pat92fr et hdumcke, (donc oui c'est moi qui les ais embarqué dans ce traquenard, mais oui promis ils sont consentants et non pas séquestré  ) par conséquent on repart un peu du début, mais pas comme on est pas des débutant en robotique on va plutôt vite, et comme c'est la première fois qu'on travaille ensemble on prend un peu nos marques =). De plus comme ils sont tous les deux du côté de paris et que moi je suis dans le sud, du côté de biarritz on fait surtout des sessions en distanciels, cela n'aide pas forcément la chose mais ça va on s'en sort bien
) par conséquent on repart un peu du début, mais pas comme on est pas des débutant en robotique on va plutôt vite, et comme c'est la première fois qu'on travaille ensemble on prend un peu nos marques =). De plus comme ils sont tous les deux du côté de paris et que moi je suis dans le sud, du côté de biarritz on fait surtout des sessions en distanciels, cela n'aide pas forcément la chose mais ça va on s'en sort bien 
Pour faire un peu le point sur là où on en est pour le moment :
Mécaniquement :
On part sur une base mecanum avec un lidar positionné assez bas de sorte à taper sur les bordures de la table pour se localiser ( mon expérience avec vigibot ) . Des contre axes sont ajoutés au niveau des roues dans le carrénage de protection pour soulager un peu les réducteur des moteurs et le train moteur avant est monté sur une liaison pivot afin d'avoir les 4 roues toujours parfaitement en contact sur le sol.
Quelques photo :
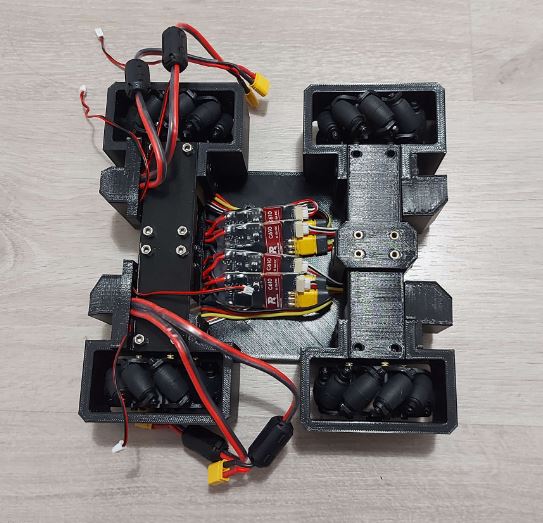
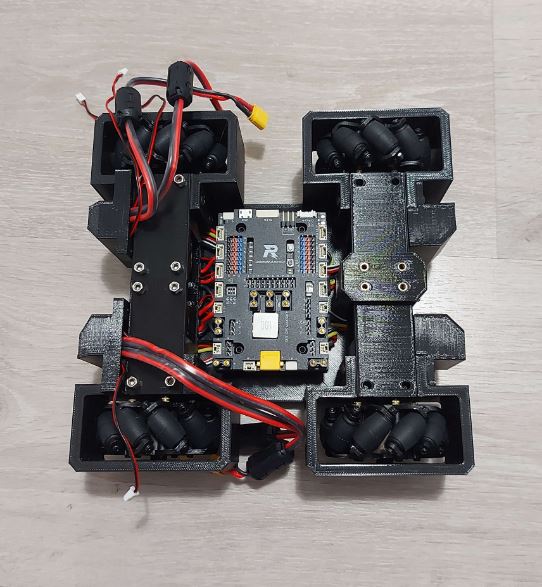
La base assemblée vue de dessus :

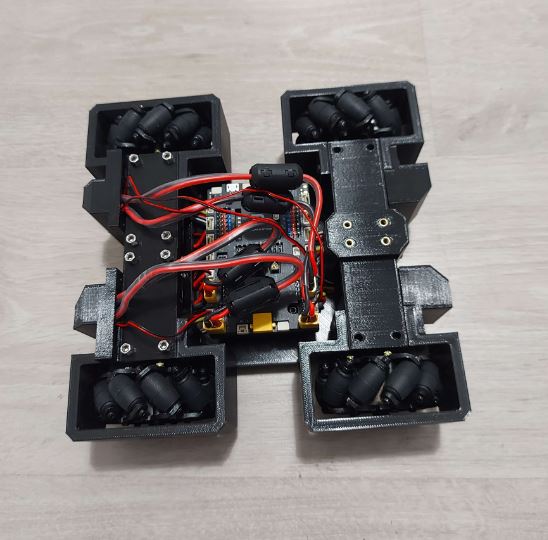
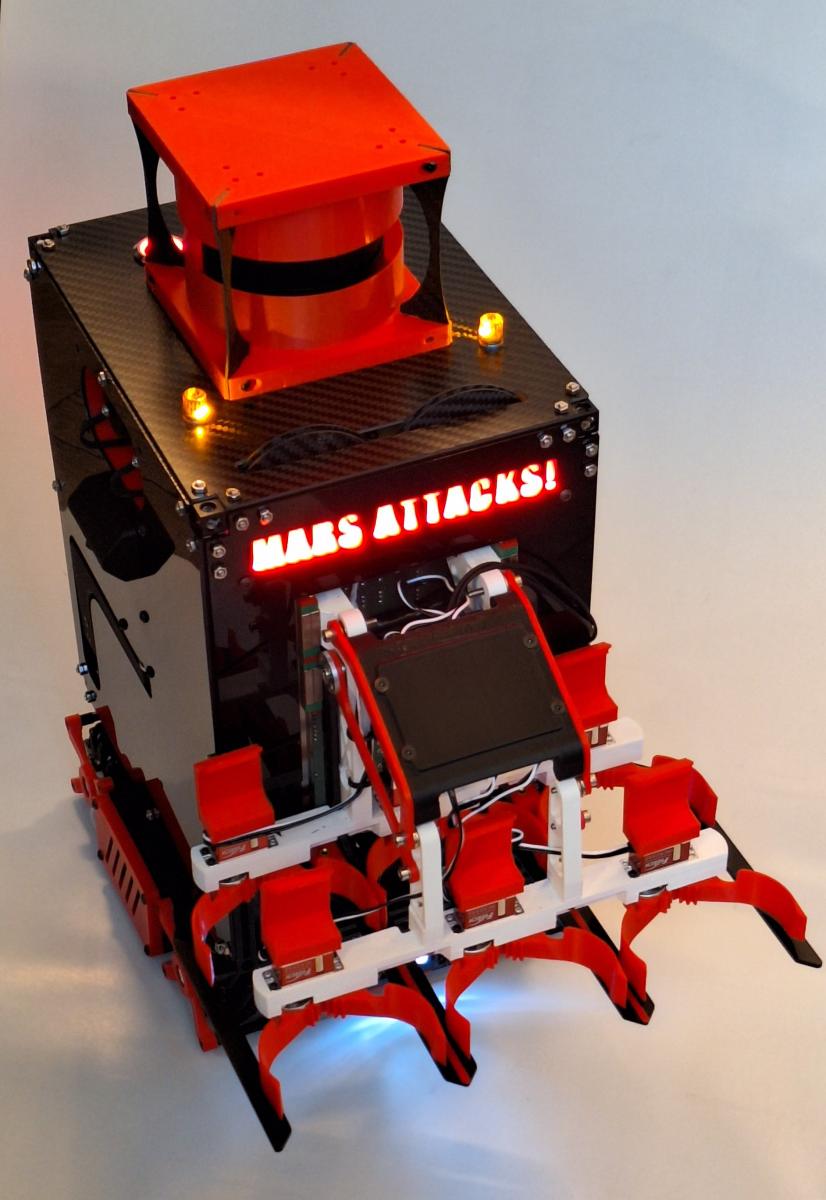
La base assemblée vue de face :
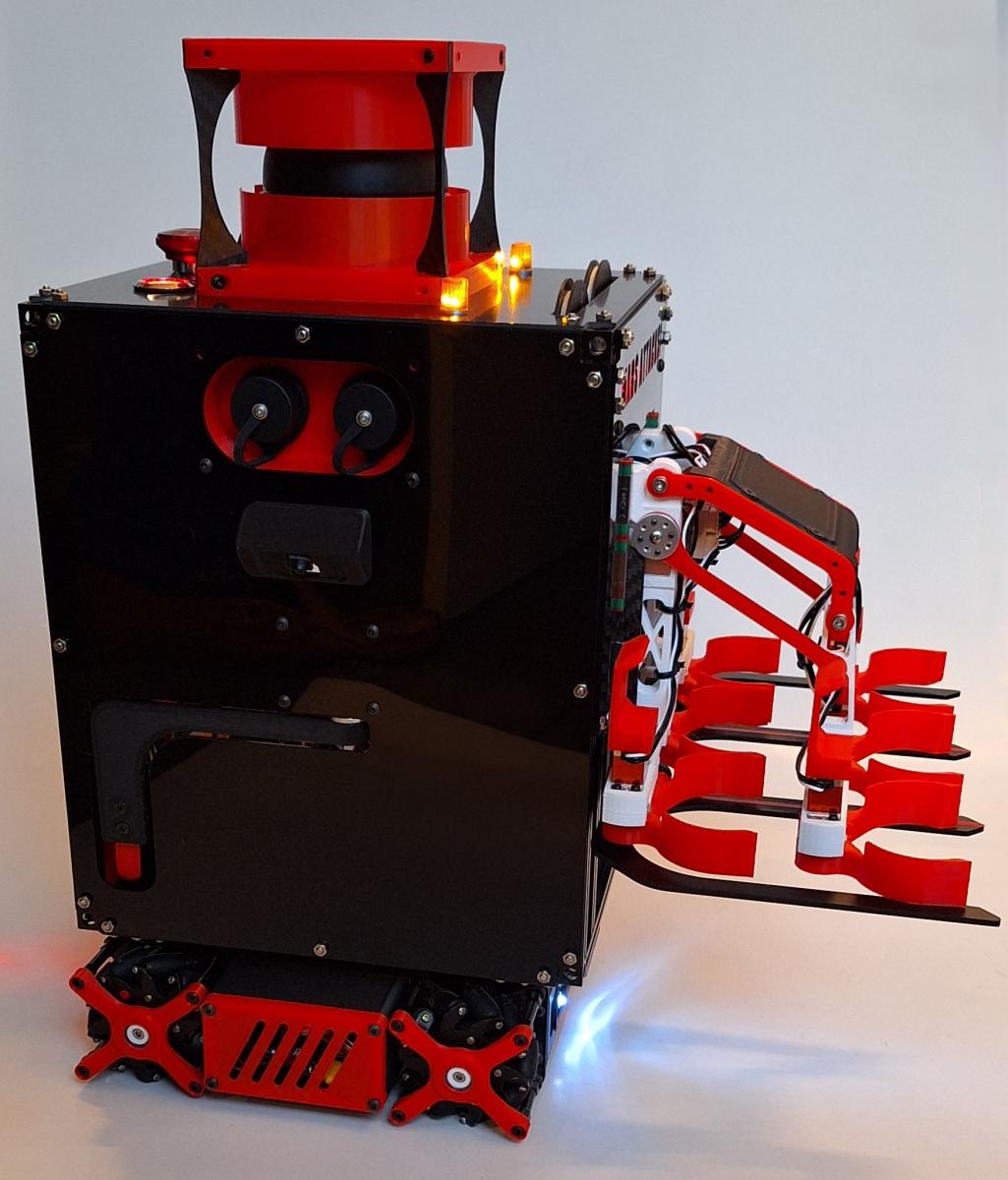
La mise en évidence de la liaison pivot du train avant sans les roues :

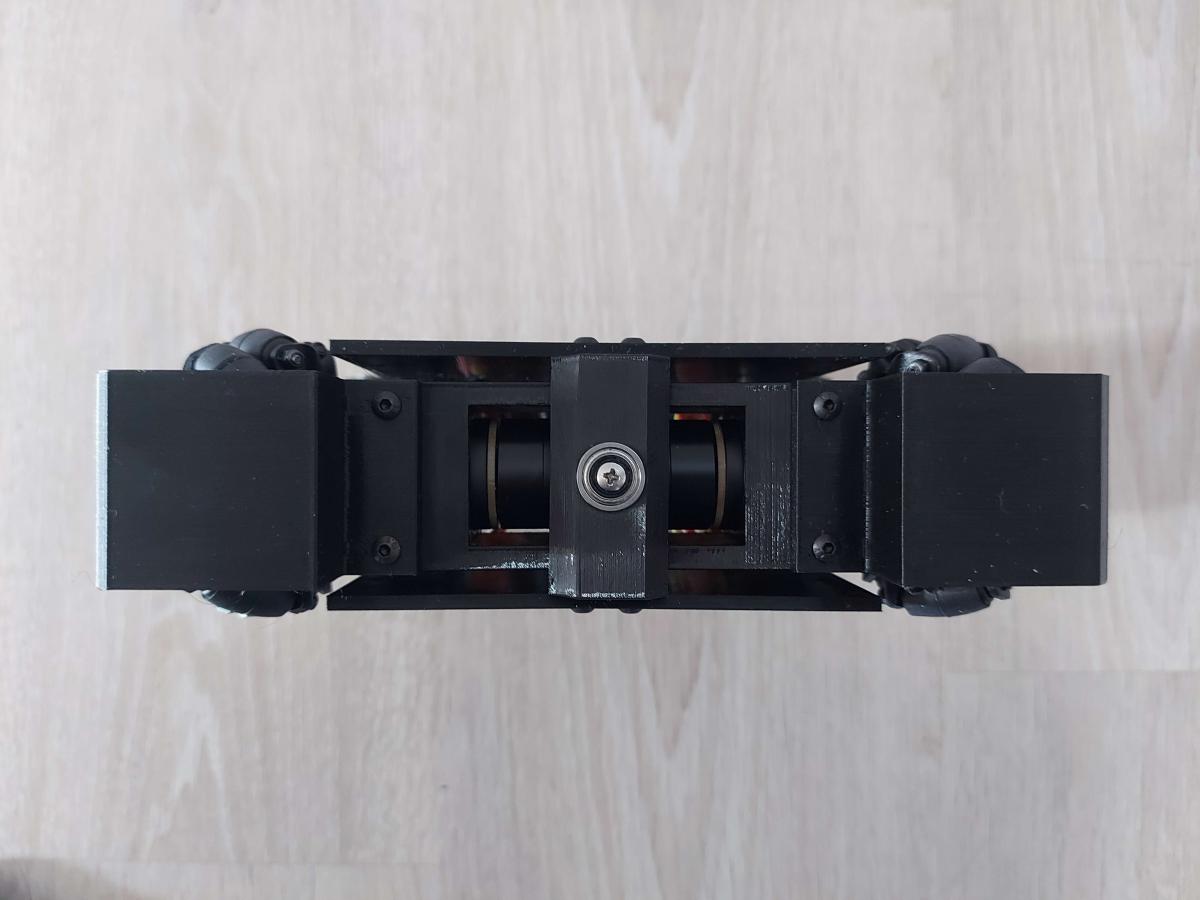
Vu de dessus du support moteur intégrant roulement et contre axe dans le carénage de roues :

Vu de face du support moteur intégrant roulement et contre axe dans le carénage de roues

Pour cette base mécanum de robot on utilise :
- 4 moteurs dji m2006 avec leur contrôleur C620
- 1 lot de 4 roues mecanum
- 8 roulements à collerette 8mm
ainsi que plusieurs pièces en imprimées en 3D (PETG) dont les fichiers seront partagées et pas mal de visserie.
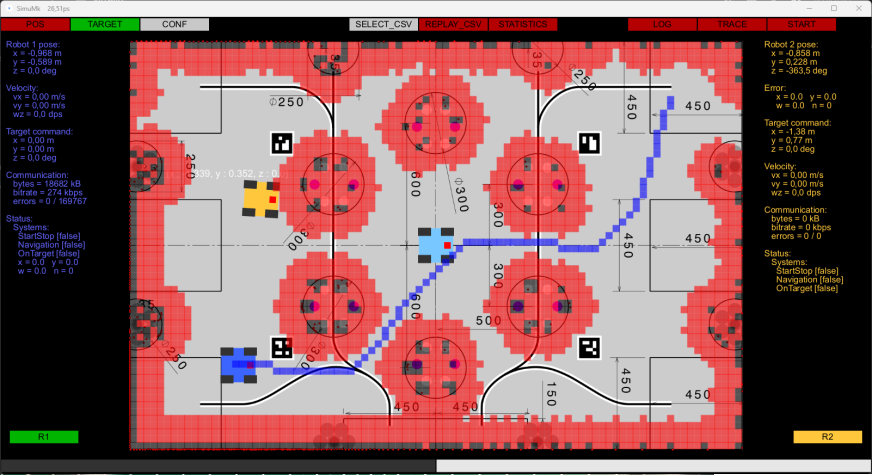
On a mis en place un outil de visualisation des données " en vue de dessus" qui permet entre autre de piloter le robot et de faire des logs.

Côté code du robot :
mais les résultats sont déjà assez intéressant =). On a prévu de publier pas mal de choses mais il faut encore qu'on avance donc je vous dit à bientôt pour la suite ! =)