Bonjour,
Effectivement, avec le planétaire noir fixe, vous avez raison. Je l’aurais plutôt appeler la couronne, mais j’ai compris.
Pourquoi voulez-vous que le planétaire noir soit fixe ? Cela mettrait tout mon raisonnement en échec.
Ce que j’aurais à ajouter, c’est que ce planétaire noir, n’ait pas fixe. Il est libre, cela change tout.
Tous les pignons du système d’engrenages sont libres. De ce fait ils ne peuvent opposer aucune résistance par eux même ; mise à part les résistances par frottement.
Ils ne font que transmettre des couples reçus par les axes bleu et vert, ou par les rotors bleu et vert soumis au Cfcém, quand l’alternateur bis-rotors serait en charge
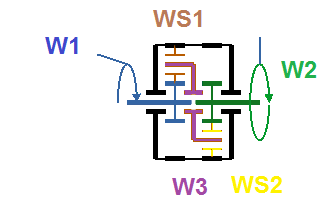
Nous avons deux axes libres, bleu et vert.
Ces deux axes sont reliés par des engrenages qui sont tous libres.
Planétaire noir : libre
Planétaire bleu : libre
Planétaire vert : libre
Porte-satellites : libre
Satellites : libres
1) Si l’axe bleu est menant et que l’axe vert est libre :
les engrenages tourneraient autour du planétaire vert, si ce dernier à une grande inertie. Si non le planétaire vert, finirait par tourner aussi dans le même sens que le planétaire bleu ; avec un glissement du aux frottements des engrenages.
2) Si l’axe vert est menant et l’axe bleu libre :
les engrenages tourneraient autour du planétaire bleu, si ce dernier à une grande inertie. Si non le planétaire bleu, finirait par tourner aussi dans le même sens que le planétaire vert ; avec un glissement du aux frottements des engrenages.
3) Si les axes bleu est vert, tournent à la même vitesse dans le même sens entraînés par des moteurs de mêmes puissances.
Le système d’engrenages complet, devrait faire une révolution sur lui même, dans le même sens.
4) Si les axes bleu et vert, tournent à des vitesses différentes dans le même sens entraînés par des moteurs de mêmes puissances.
Les engrenages tourneraient autour du planétaire le plus lent (soit bleu ou vert).
Le moteur du planétaire le plus lent, ne pourrait pas être surentraîné par le moteur du planétaire le plus rapide. Car il n’existe aucun point d’appuis fixe pour les engrenages.
5) Si les axes bleu et vert tentent de tourner chacun en sens inverse, entraînés par des moteurs de puissances différentes :
Le système d’engrenages interdit la rotation inverse des planétaire bleu et vert.
Le moteur le plus puissant bloquerait le planétaire du moteur le moins puissant et ferait tourner les engrenages autour du planétaire du moteur le moins puissant. Car les engrenages non aucun point fixe ou s’appuyer pour imposer la plus grande puissance au planétaire le moins puissant. Nous serions alors dans les cas (1) ou (2) ou (4).
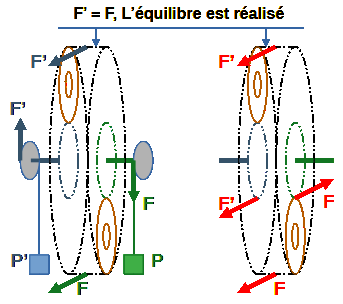
6) Si les axes bleu et vert tentent de tourner chacun en sens inverse, entraînés par des moteurs de mêmes puissances :
Le système d’engrenages interdit la rotation inverse des planétaire bleu et vert.
En théorie, les engrenages bloqueraient les deux moteurs. Nous aurions un équilibre précaire.
7) C’est là qu’est l’intérêt.
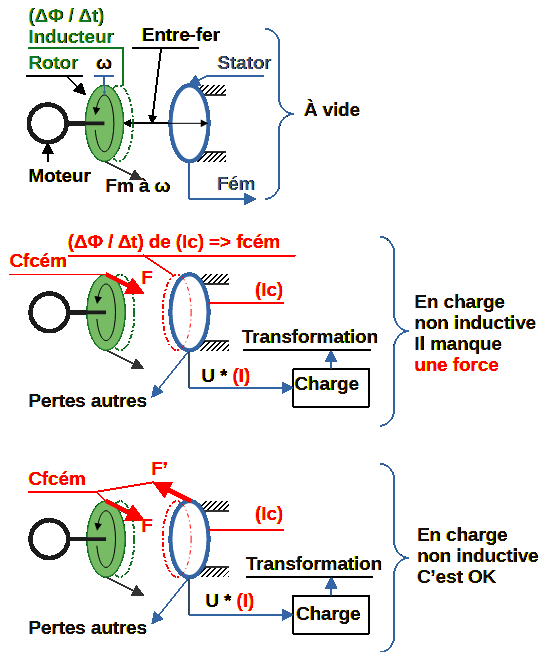
Reprenons le cas 4 qui entraînerait l’alternateur bis-rotors (ABR).
Si l’ABR tournent à vide (sans charge) nous sommes dans le cas 4.
Si l’ABR est en charge, le Cfcém additionne le cas 6 au cas 4. C’est à dire que le Cfcém agirait sur les deux rotors, donc les deux planétaires bleu et vert avec une même puissance sur chaque rotor, mais de sens inversé.
Ces puissances du Cfcém, égales et opposées seraient équilibrées.
Les motricités assureraient les rotations du cas 4, sans opposition du Cfcém, bien que l’ABR soit en charge.








 _ (ω) sans flux (Φ) inducteur (sans aimants), pas d’induction. Donc (Φ) est un facteur.
_ (ω) sans flux (Φ) inducteur (sans aimants), pas d’induction. Donc (Φ) est un facteur.