

Bonjour à tous et très bonne année robotique 2025 !!!
Contrairement à ce que je pensais j'ai pu consacrer du temps à mon nouveau quadrupède. Les essais informels ont montré des choses intéressantes, en particulier le grand intérêt de l'utilisation du tapis de course pour 3 raisons: la praticité, la précision de la mesure de vitesse et la grande efficacité de mon revêtement "peau de phoque" en mohair qui est d'un rendement incroyable même à très haute cadence sur le revêtement rugueux du tapis.
Ce sera donc ma méthode d'essais pratiques, même si je sais que cela donnera des résultats optimum et donc pas forcément représentatifs d'une course de vitesse sur un terrain lambda.
Mais je n'en suis pas là. J'ai passé une bonne partie de la semaine sur le banc fixe pour déterminer dans un premier temps la foulée la plus rapide résultante du couple fréquence / longueur.
J'ai tout de suite rallongé le fémur de 16 mm, pour passer à un fémur de 111mm, j'aurais été trop juste un fémur de 95 mm. Pour rappel je vise une vitesse de 7.2 km/h
Les caractéristiques géométriques de mon quadrupède sont donc: 12 cm de large, 22 cm de long et 160mm de haut (aux axes des pattes), 420g, fémur 111 mm, tibia 90 mm. La foulée programmée en cinématique inverse est de 23 cm, avec un offset vers l'avant de 10mm. C'est la base de ma recherche d'optimisation même si évidemment tous ces paramètres pourraient ultérieurement varier.
J'ai aussi pas mal bossé sur la programmation des mouvements . je me suis aperçu qu'à ces hautes fréquences de foulée, il fallait diminuer le nombre de points programmés. Je suis passé de 16 points (trajectoire patte aller/retour) à 10 points, ce qui semble être l'optimum (peu d'écart entre 12 et 10 points). A ces fréquences ça ne gêne pas la fluidité du mouvement ( ce qui n'est pas le cas à des fréquences de foulées plus faibles).
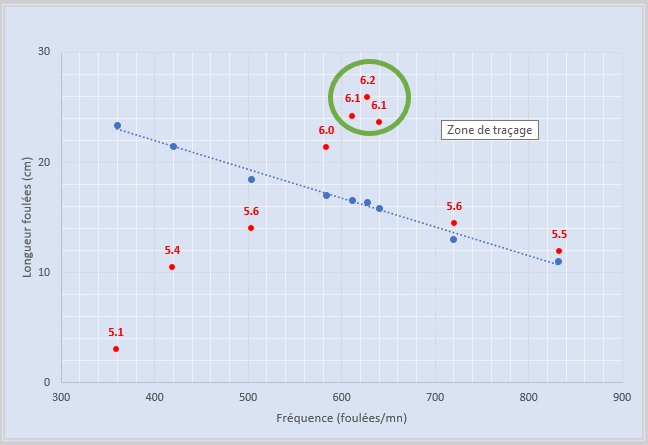
Ces paramètres étant figés, j'ai fait varier la fréquence de foulée et j'ai mesuré la foulée en bout de tibia (sans pied) et à partir de ces deux valeurs j'ai calculé la vitesse théorique, sans charge ni perte de rendement, ce qui représente la vitesse maximale que je pourrais atteindre. La synthèse des résultats est visible dans le graphique ci-joint (longueur foulée en bleu, vitesse résultante en rouge en km/h).
Les enseignements qu'on peut en tirer sont les suivants :
* Le quadrupède n'est pas dimensionné pour atteindre 7.2 km/h. Si les servos le supportent il faudrait augmenter les longueurs du fémur et du tibia, ce qui sortirait des proportions classiques . A voir.
* La foulée programmée est réalisée à une fréquence de 360 bpm ( et en dessous) . L'augmentation de la fréquence diminue la longueur de la foulée de façon à peu près linéaire.
* L'optimum de la vitesse (cercle vert) est atteint autour d'une fréquence de 620 bpm, ce qui est très proche de l'objectif fixé (600 bpm). A cette fréquence la longueur de la foulée est autour de 16.5/17 cm.
Je vais donc partir sur une fréquence de 620 bpm pour mes essais sur tapis. Le fait de rajouter un pied devrait allonger artificiellement la longueur du tibia. A voir les résultats réels, il manque plus de 3 cm de foulée ! Dans un 3ème temps je testerais l'efficacité de différents pieds, formes, matières et dimensions.
Les servos semblent confirmer leur données théoriques au niveau de la vitesse (0.06 s/60°) mais il faudrait qu'ils soient encore plus rapides pour obtenir une foulée plus grande à haute fréquence. Leur couple , à tester en charge et en mouvement, permettront ou pas d'augmenter la taille du quadrupède. C'est ce que je regarderai, si nécessaire, dans un dernier temps.







 maybe!
maybe! 












