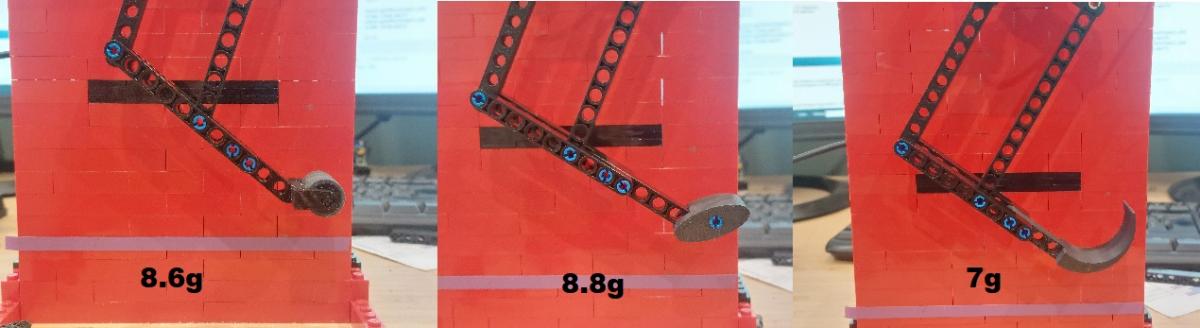
Je ne comprends pas. La foulée doit être de 140mm.
Ce n'est pas le même lien que le mien qui est déjà ancien.
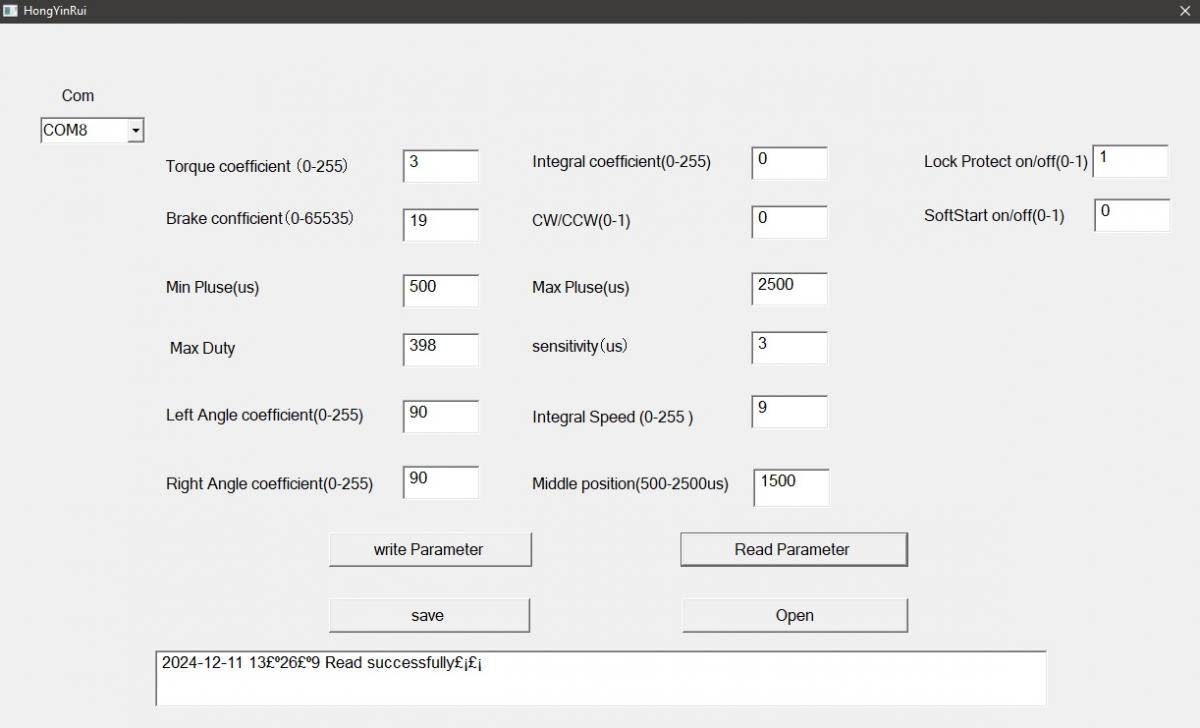
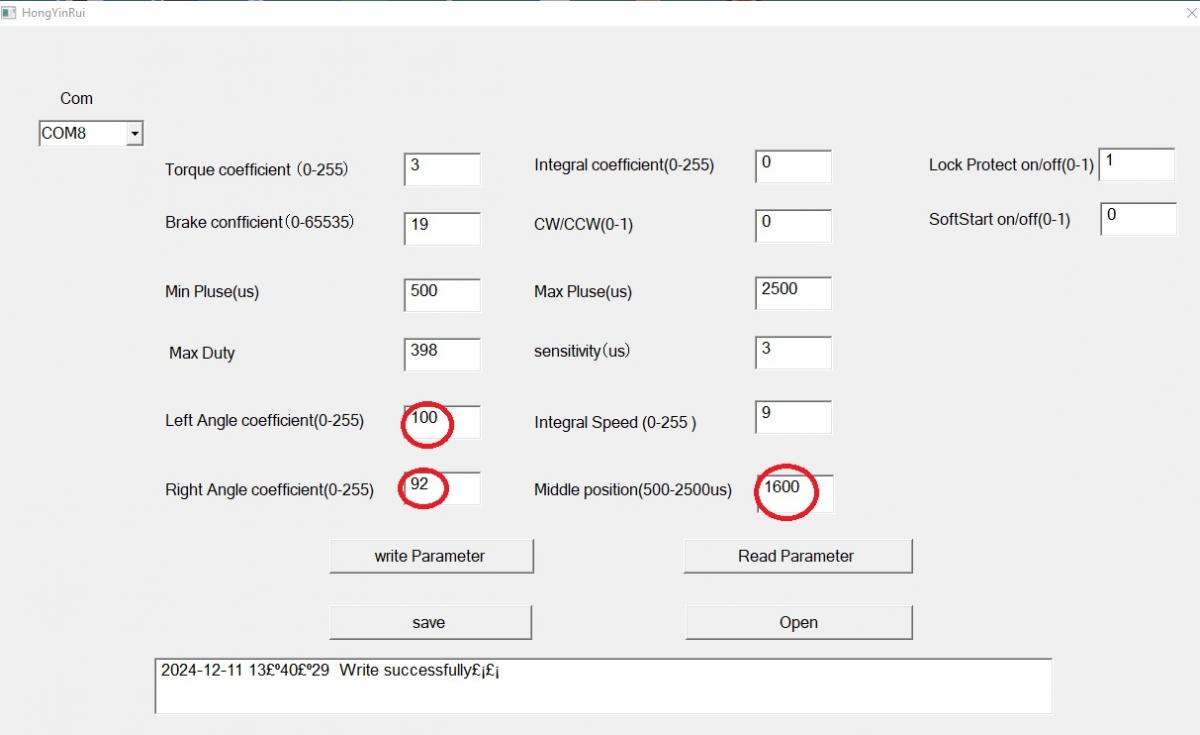
A quoi ça ressemble l'interface USB ? C'est surement très intéressant. Peut-être utilisable sur d'autres servos ?
J'ai diminué le nombre de points de 22 à 14 (7 stance /7 swing), pour voir l'impact sur la cadence et la foulée. Avec aussi peu de points, le mouvement est potentiellement moins fluide, mais je veux voir le comportement des servos. Je suis arrivé à 624 foulées de 20 cm par minute ! C'est impressionnant.
Je ne travaille pas sur la forme du mouvement, là, c'était pour voir si mon objectif était tenable. Il l'est en théorie, mais je crains le comportement du quadrupède en mouvement à cette cadence ! 
Un bout de film à vitesse réelle :