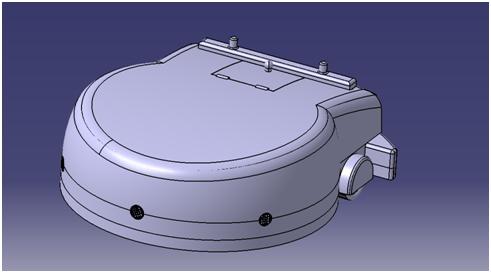
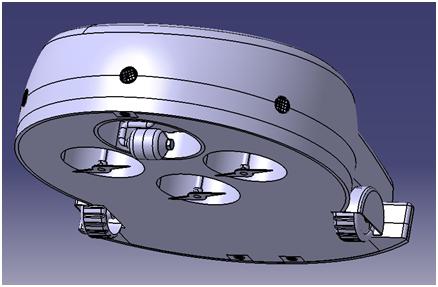
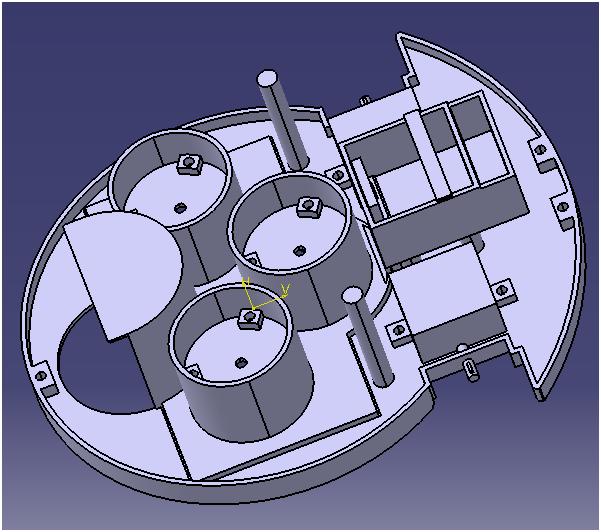
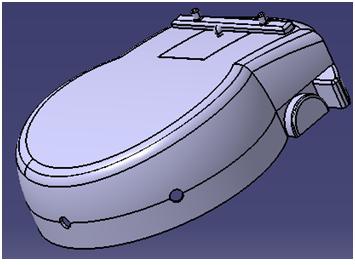
je travaille sur un projet d'étude et de conception (sur CATIA V5) d'un robot tendeuse la conception est à peu près fini et j'en ai vraiment besoin un peu d'aide si possible,le robot doit revenir à sa base tout seul pour se recharger et je n'arrive pas à trouvé un système pour qu'il détecte sa base et prend la route la plus courte à la base et après de se bien se garer dans sa base pour qu'il se recharge (pour cela on m'a proposer un système à infrarouge sur la base et sur le robot pour bien être précis mais aucune idée comment ca marche).
Ca peut etre un système GPS peut être ou un système de GPS interne au jardin par exemple avec 3 ou 4 repère et le robot se repère par rapport à ces point pour pouvoir définir une route bien precise au lieu que ca reste aléatoire par ce que ca risque de faire le jardin en puzzle.
Et si quelqu'un connait les couts de programmation d'un telle robot: éviter les chocs à l'aide d'un détecteur Ultra sonor, changer sa trajectoir après un chocs, détecter la pluie et l'humiditer pour qu'il ne sors pas de sa base, détecteur d'inclinaison pour désactiver les lames, être programmer par l'utilisateur sur le nombre de fois de sortit par semaine ou par jour avec l'heure....
En effet mon projet consiste à trouver les prix et les fournisseur de tout ca et non pas de les fabriqué (peut être par partit)
J'apprécierais vraiment votre aide.
Et si quelqu'un à plus d'idée la ajouté ou des questions a me posé tout est le bienvenue
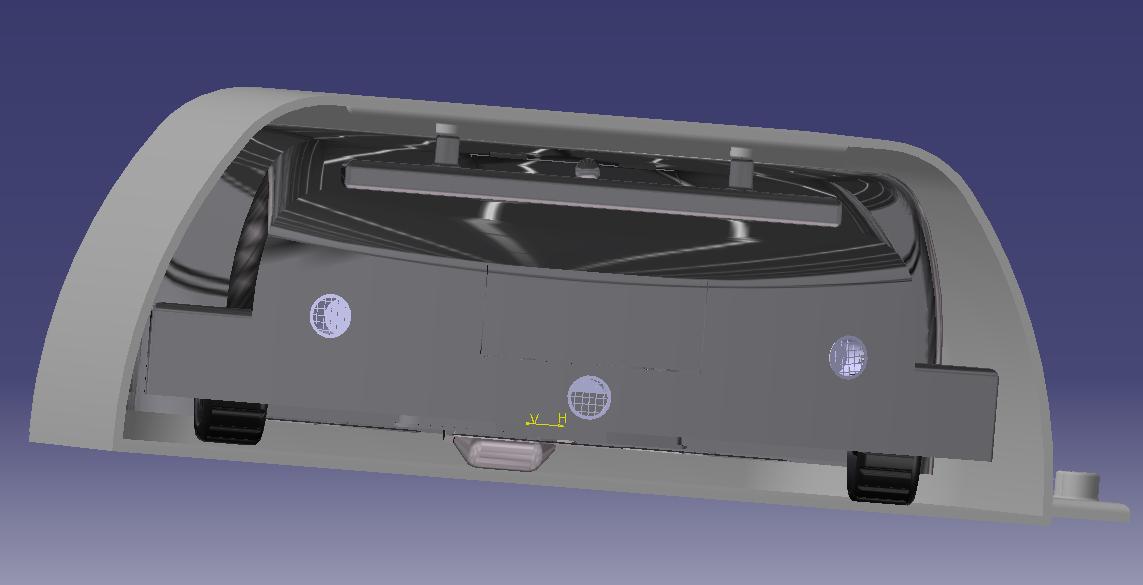
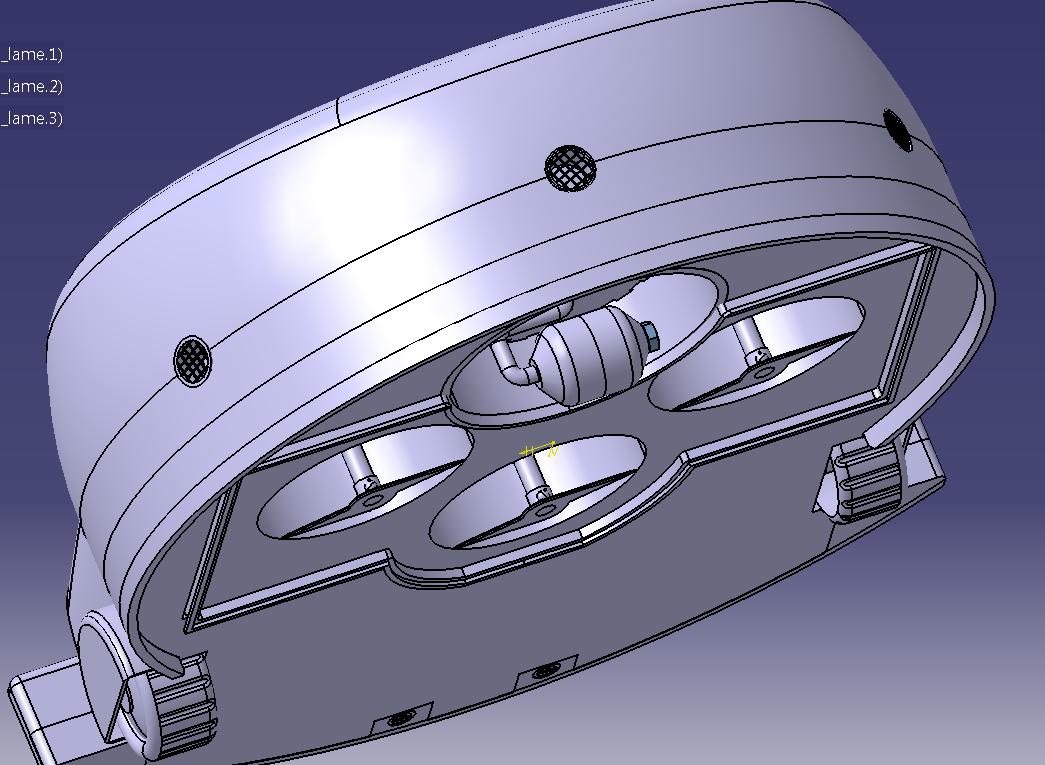
Voilà quelque photos du robot
 :
: robot_tendeuse6.bmp 1,09 Mo
381 téléchargement(s)
robot_tendeuse5.bmp 1,31 Mo
265 téléchargement(s)
robot_tendeuse6.bmp 1,09 Mo
381 téléchargement(s)
robot_tendeuse6.bmp 1,09 Mo
381 téléchargement(s)
robot_tendeuse5.bmp 1,31 Mo
265 téléchargement(s)
robot_tendeuse6.bmp 1,09 Mo
381 téléchargement(s)
Fichier(s) joint(s)
-
robot_tendeuse2.bmp 1,54 Mo
252 téléchargement(s)