Salut, T'avais pas autre chose comme bois ? Parce que du medium, ca doit peser la tonne !!
C'est quoi tout les fil avec le condo ?
Je te conseil de mettre un autre capteur pour les obstacles, sur ton nouvel etage, car maintenant il ne doit plus passer sous les meubles (c'est ce que ça ma fait )


[2WD]mon robot Jardise
Débuté par
seb03000
, juil. 22 2011 03:29
202 réponses à ce sujet
#141

Microrupteurman
-

- Modérateur
-

- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 26 février 2012 - 12:52
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#142
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 26 février 2012 - 01:00
Salut, T'avais pas autre chose comme bois ? Parce que du medium, ca doit peser la tonne !!
C'est quoi tout les fil avec le condo ?
Je te conseil de mettre un autre capteur pour les obstacles, sur ton nouvel etage, car maintenant il ne doit plus passer sous les meubles (c'est ce que ça ma fait )
Désolé mes j'ai fait ça avec les moyen du bore , je ne trouve pas que ça baisse aussi lourd , enfin c'est sur j'aurai pu
trouvais mieux , si je trouve mieux je changerai la platine en bois.
Le condo?????
heu...... si j'ai rajouté un étage , c'est que je n'avais pas assez de place pour mes carte et module , et je ne conté pas du
tout que mon robot passe sous les meuble.
Merci de tes conseil microrupteurman2
#143
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 26 février 2012 - 01:07
C'est quoi tout les fil avec le condensateur ?C'est quoi tout les fil avec le condo ?
desolé..
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#144
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 26 février 2012 - 01:11
C'est quoi tout les fil avec le condensateur ?
desolé..
C'est pas grave microrupteurman2 , faut dire cas cette heure la , j'ai du mal a suivre , la
fatigue.
Et bien tous c'est file son tous les plus ( + ) et les moins ( - ) de mes modules pour les
parasites.
#145
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 26 février 2012 - 01:16
Ok, il faudra que je mette un condensteur similaire sur ma nouvelle alim, mes servo(9g) font legerement beuguer tout le reste...
Sur ceux, bonne nuit !!
Sur ceux, bonne nuit !!
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#146
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 05 mars 2012 - 01:25
Bonjour a tous.
J’aurais une question a posé , ou une demande plutôt.
Comme vous le savais je possède la carte chipKIT Uno32 et je cherche la librairie IRremote car je ne la trouve pas du tout sur
google , je ne doit pas employer le bon thermes je pence.
A je tien a précisé que je possède la librairie IRremote mes pour la Carte DFRduino Duemilanove 328 , donc j'ai voulu prendre la
librairie IRremote et la transféré sur le logiciel chipKIT Uno32 , je compile mon programme pour contrôle ma pince avec la
télécommande, mes ça ne fonctionne pas ( même quel ne détecte même pas la librairie IRremote bizarre. )
Voila merci d'avance.
@Cordialement.
J’aurais une question a posé , ou une demande plutôt.
Comme vous le savais je possède la carte chipKIT Uno32 et je cherche la librairie IRremote car je ne la trouve pas du tout sur
google , je ne doit pas employer le bon thermes je pence.
A je tien a précisé que je possède la librairie IRremote mes pour la Carte DFRduino Duemilanove 328 , donc j'ai voulu prendre la
librairie IRremote et la transféré sur le logiciel chipKIT Uno32 , je compile mon programme pour contrôle ma pince avec la
télécommande, mes ça ne fonctionne pas ( même quel ne détecte même pas la librairie IRremote bizarre. )
Voila merci d'avance.
@Cordialement.
#147
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 05 mars 2012 - 01:31
Je sais pas si ca y fait mais ta chipkit est une 32bits, pas la UNO
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#149
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 06 mars 2012 - 01:30
Re les amis , bon pour la carte chipKIT Uno32 apparemment il non pas créé de librairie IR ,Donc j'ai le temps d'attendre , mes j'ai
jouer malin j'ai repris une de mes Carte DFRduino Duemilanove 328 , et j'ai commencé a tout mètre en place.
J'ai commencé a programmé ma pince , le code se compile bien la télécommande répond bien aux pressions demandées.
Mon programme n'est pas tout t'a fait fini.
Voici quelque photo:
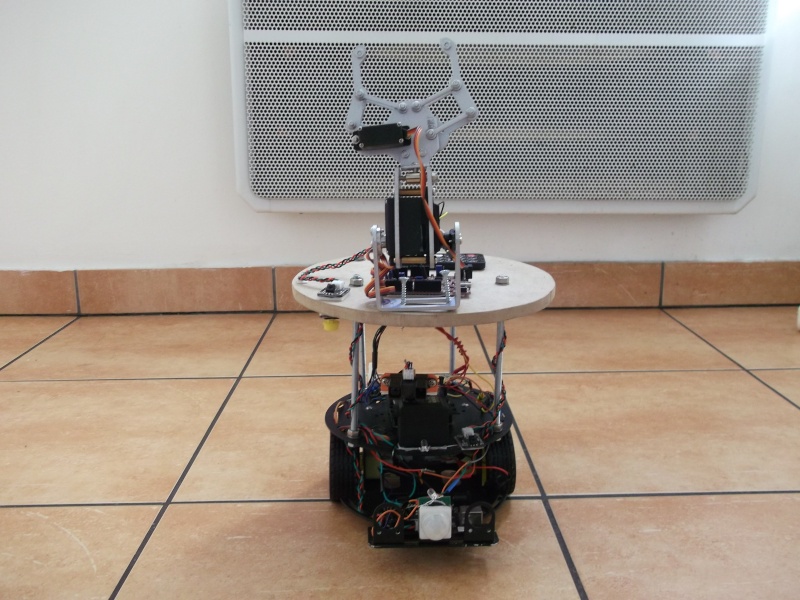
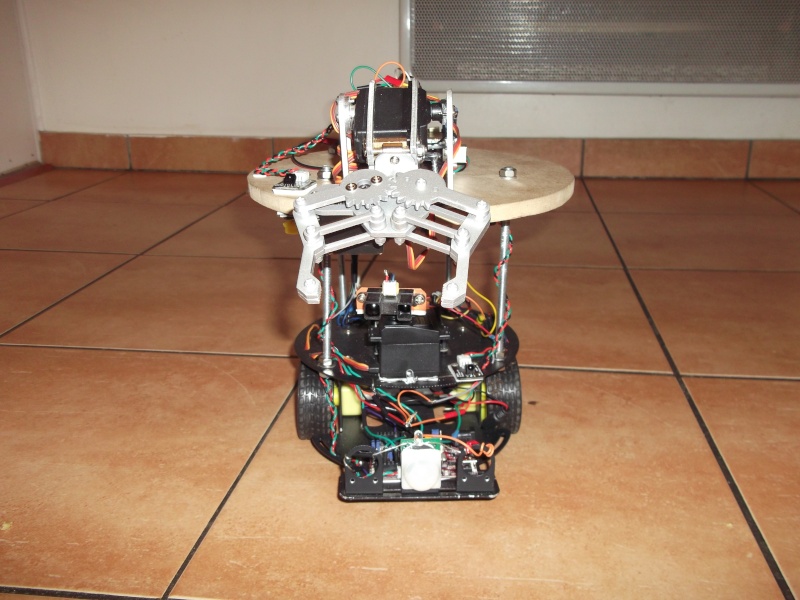
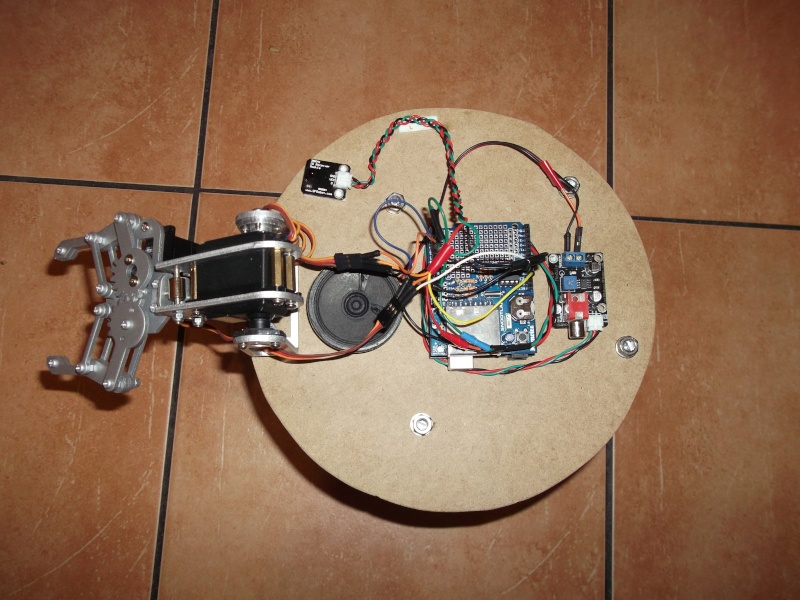
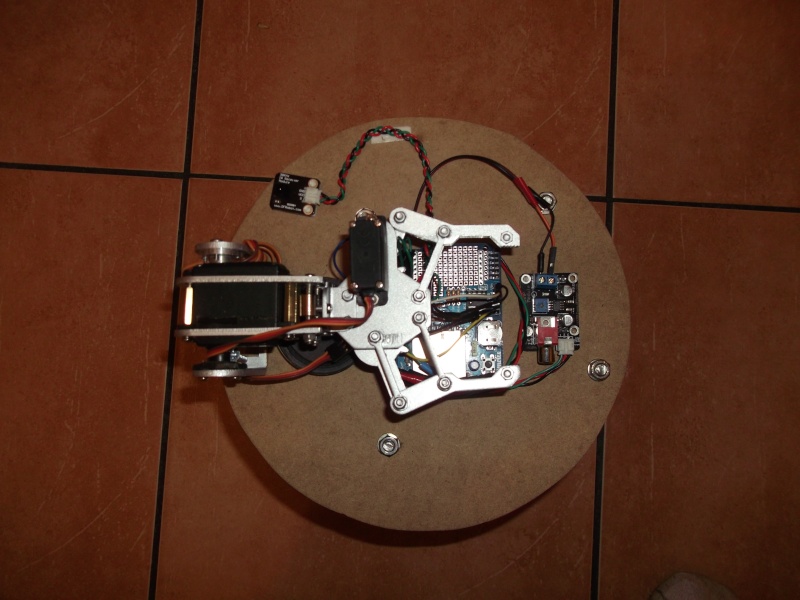
Voila , la suite bientôt si tout vas bien.
jouer malin j'ai repris une de mes Carte DFRduino Duemilanove 328 , et j'ai commencé a tout mètre en place.
J'ai commencé a programmé ma pince , le code se compile bien la télécommande répond bien aux pressions demandées.
Mon programme n'est pas tout t'a fait fini.
Voici quelque photo:
Voila , la suite bientôt si tout vas bien.
#150
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 06 mars 2012 - 01:34
Joli ! Mais, c'est le robot qui est petit ou la pince qui est big ?
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#151
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 06 mars 2012 - 01:42
Merci microrupteurman2
Je dirai que les photo son trompeuse , car au contraire le robot et bic , mais la pince , comparai au robot et petite.
Seul inconvénient c'est que le robot a du mal a roulé a causse de la bille caster , car comme cher moi ya du parqué et du
carrelage dans la cuisine , des que le robot roule la bille caster se mes dans les fente , et fait basculé mon robot , vas
falloir que je trouve une roue folle qui soie adapté a mon chassie , donc si vous avez quelque chose a me proposé
je suis preneur , galère pffffffffff.
Je dirai que les photo son trompeuse , car au contraire le robot et bic , mais la pince , comparai au robot et petite.
Seul inconvénient c'est que le robot a du mal a roulé a causse de la bille caster , car comme cher moi ya du parqué et du
carrelage dans la cuisine , des que le robot roule la bille caster se mes dans les fente , et fait basculé mon robot , vas
falloir que je trouve une roue folle qui soie adapté a mon chassie , donc si vous avez quelque chose a me proposé
je suis preneur , galère pffffffffff.
#152
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 06 mars 2012 - 02:00
Oui, j'ai remarqué, aussi. Les ball caster ne sont pas du tout adapté pour nos robots. Le mien peut meme pas passer par dessus une rallonge... Alors j'imagine meme pas sur du parquet. Je pense qu'une roue omnidirectionnele irai mieu, ou une ball caster relativement grosse, est qui ne genere aucun frotement .....(a mon avis, ça n'existe ^pas !)
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !

#154
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 09 mars 2012 - 12:54
Et voila , j'ai bossé comme un dingue sur ma pince aluminium , pour pouvoir le contrôlé avec ma télécommande PIR.
mes ya comme un problème , et je ne voie pas doux ça peu venir.
Quand je presse une de mes touches de ma télécommande que j'ai configuré dans mon programme , donc les touches ( 4,6,2,8 )
ça mes trop de t'en avants que la pince réponde.
Voici mon programme:
Donc si une des personnes pourrai m’aidai a résoudre l'énigme de mon problème ,je lui en serré très reconnaissant.
En attendent je continue a chercher mon problème.
Merci d'avance a se qui lise mon sujet.
@Cordialement.
mes ya comme un problème , et je ne voie pas doux ça peu venir.
Quand je presse une de mes touches de ma télécommande que j'ai configuré dans mon programme , donc les touches ( 4,6,2,8 )
ça mes trop de t'en avants que la pince réponde.
Voici mon programme:
#include <Servo.h>
#include <IRremote.h>
Servo servo1; // créer un objet d'asservissement pour commander le servo1
Servo servo2; // créer un objet d'asservissement pour commander le servo2
int possition1 = 90; // variable pour stocker la position1 d'asservissement
int possition2 = 90; //variable pour stocker la position2 d'asservissement
int RECV_PIN = 5;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600); // lancer un port série sur le serial monitor
irrecv.enableIRIn(); // Démarrer le récepteur
servo1.attach(7); // attache le servo sur la broche 7 à l'objet d'asservissement
servo1.write(possition1); // mis en position1 de départ servo1
servo2.attach(6); // attache le servo sur la broche 6 à l'objet d'asservissement
servo2.write(possition2);// mis en position2 de départ servo2
}
void loop()
{
Serial.println(results.value, DEC);
if (irrecv.decode(&results)) {
irrecv.resume();
unsigned long codeValue;
codeValue = results.value;
if (codeValue == 16615543)// touche 4 de la télécomande ferme la pince
{
possition1 = (possition1 +40);
servo1.write(possition1);
}
else if (codeValue == 16619623)// touche 6 de la télécommande ouvre la pince
{
possition1 = (possition1 -40);
servo1.write(possition1);
}
else if (codeValue == 16591063)// touche 2 de la télécommande lève la pince
{
possition2 = (possition2 +50);
servo2.write(possition2);
}
else if (codeValue == 16607383)// touche 8 de la télécommande décend la pince
{
possition2 = (possition2 -50);
servo2.write(possition2);
}
}
}Donc si une des personnes pourrai m’aidai a résoudre l'énigme de mon problème ,je lui en serré très reconnaissant.
En attendent je continue a chercher mon problème.
Merci d'avance a se qui lise mon sujet.
@Cordialement.
#155
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 09 mars 2012 - 02:10
Salut, Essaie de rajouter un delay(150); a la fin qe chaque else if.
Car tu dit a ton servo +50° et tu ne lui laisse aucun delay pour y arriver. A teste
(je garanti rien)
Car tu dit a ton servo +50° et tu ne lui laisse aucun delay pour y arriver. A teste
(je garanti rien)
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#157
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 09 mars 2012 - 02:12
Bon voila j'ai pu amélioré mon code en rajoutent un switch et des cases c'est bien mieux
Voici le code.
Mon code n'est pas tout ta fait fini , car j'aisé de positionné le bras de mas pince aux niveaux bas.
Car quand j'allume ma pince elle se lève automatiquement.
édité:
Remplacement du programme , pour le partage.
Voici le code.
#include <Servo.h>
#include <IRremote.h>
Servo servo1; // créer un objet d'asservissement pour commander le servo1
Servo servo2; // créer un objet d'asservissement pour commander le servo2
int possition1 ; // variable pour stocker la position1 d'asservissement
int possition2 = 90; //variable pour stocker la position2 d'asservissement
int RECV_PIN = 5;
int current; //conserver la trace de la position actuelle du servo
int codeValue; //les code de la télécommande
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
Serial.begin(9600); // lancer un port série sur le serial monitor
servo1.attach(7); // attache le servo sur la broche 7 à l'objet d'asservissement
servo1.write(possition1); // mis en position1 de départ servo1
servo2.attach(6); // attache le servo sur la broche 6 à l'objet d'asservissement
servo2.write(possition2); // mis en position2 de départ servo2
irrecv.enableIRIn(); // Démarrer le récepteur
}
void loop()
{
Serial.println(results.value, DEC);
if (irrecv.decode(&results))
{
codeValue = results.value;
switch (codeValue)
{
case 16615543: // touche 4 de la télécomande ouvre la pince
current +=80;
if (current > 180) current = 0;
servo1.write(current);
break;
case 16619623: // touche 6 de la télécommande ferme la pince
current -=80;
if (current < 0) current = 180;
servo1.write(current);
break;
case 16591063: // touche 2 de la télécommande décend la pince
current +=40;
if (current > 180) current = 0;
servo2.write(current);
break;
case 16607383: // touche 8 de la télécommande léve la pince
current -=40;
if (current < 0) current = 180;
servo2.write(current);
break;
int sensorValue = analogRead(1); // analogique 1, a 10k
while (sensorValue > 255) { //valeur peut être ajustée, 255 très sensible
sensorValue = analogRead(1); //lit la valeur du capteur à nouveau pour la boucle
}
servo1.write(possition2);
current = possition2;
servo1.write(possition1);
current = possition1;
servo2.write(possition2);
current = possition2;
servo2.write(possition1);
current = possition1;
}
irrecv.resume();
}
}Mon code n'est pas tout ta fait fini , car j'aisé de positionné le bras de mas pince aux niveaux bas.
Car quand j'allume ma pince elle se lève automatiquement.
édité:
Remplacement du programme , pour le partage.
#158
julkien
-

- Membres
-
- 1â¯032 messages
Membre chevronné
- Gender:Male
Posté 09 mars 2012 - 07:30
Mon code n'est pas tout ta fait fini , car j'aisé de positionné le bras de mas pince aux niveaux bas.
Car quand j'allume ma pince elle se lève automatiquement.
c'est ici que ça se passe !
int possition1 = 90; // variable pour stocker la position1 d'asservissement
int possition2 = 90; //variable pour stocker la position2 d'asservissement
#159
seb03000
-
- Membres
-
- 1â¯193 messages
Membre chevronné
- Gender:Male
Posté 09 mars 2012 - 09:43
A mes quel abruti que je suis sérieux , mois qui été persuadé que le réglage se fessait au niveaux de la partie void loop (){
Mes quel c...
En tout cas un grand merci julkien , tu m'enlève une épine du pied.
Mes quel c...
En tout cas un grand merci julkien , tu m'enlève une épine du pied.
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

