Etant élève de seconde année de prépa, je dois faire un TIPE (Travail d'Initiative Personnel Encadré (je crois)) et je me suis dit : mais pourquoi ne pas profiter de ce temps pour faire ce que j'aime -> Du bidouillage de robot.
Le secteur de recherche étant choisit, j'ai ensuite décidé de me pencher sur un sujet qui me tiens particulièment à coeur: les robots holonomes.
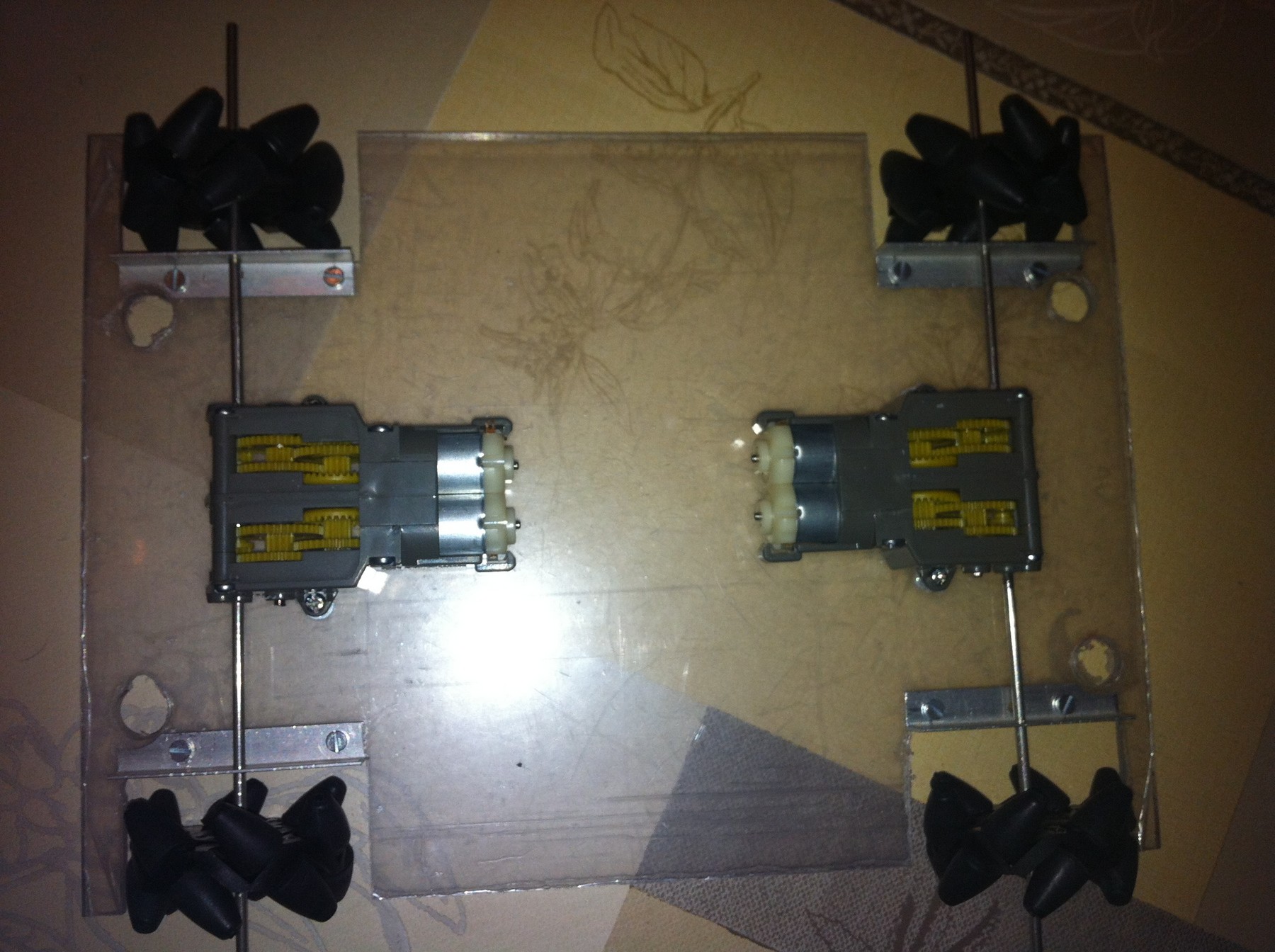
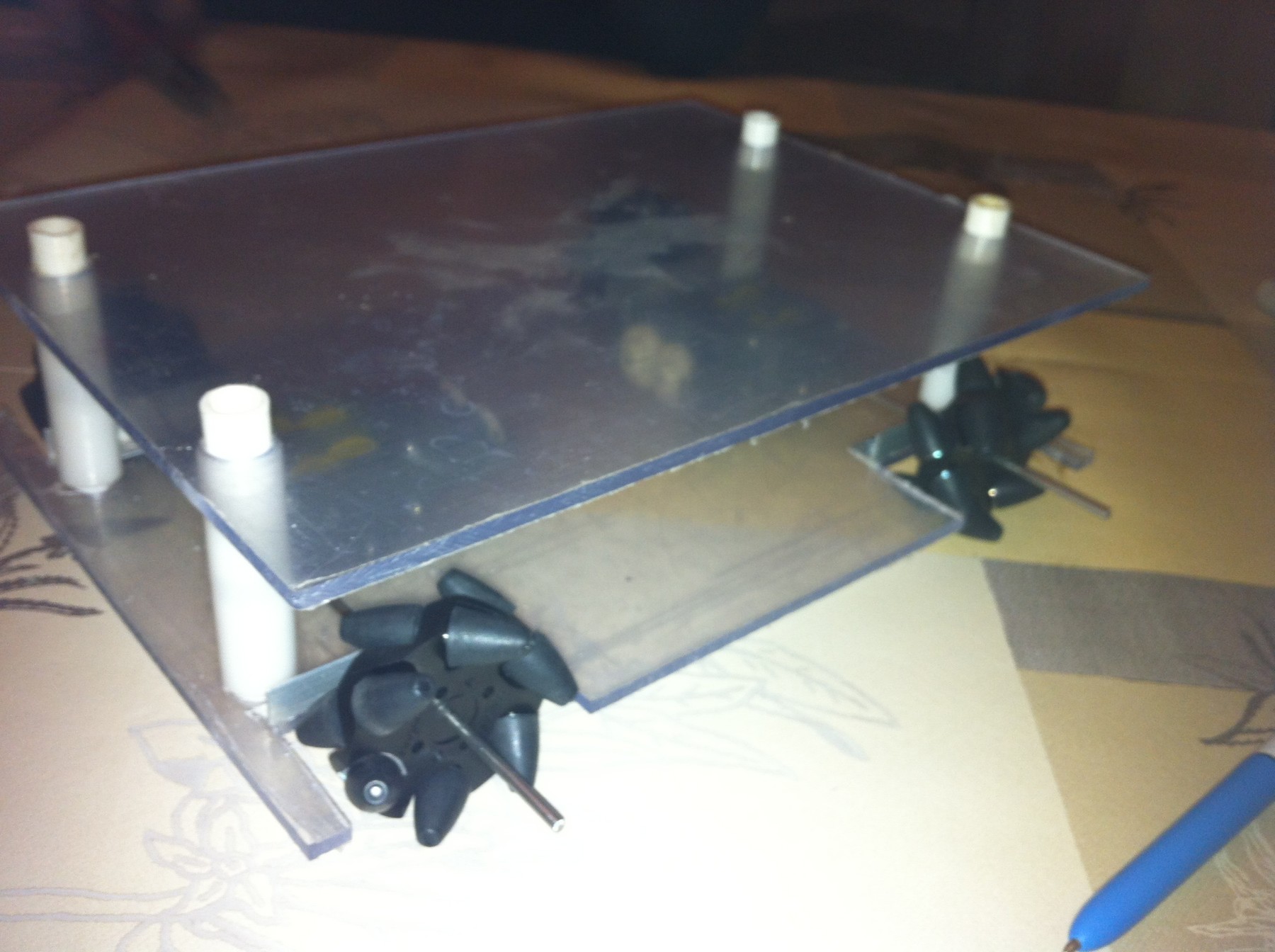
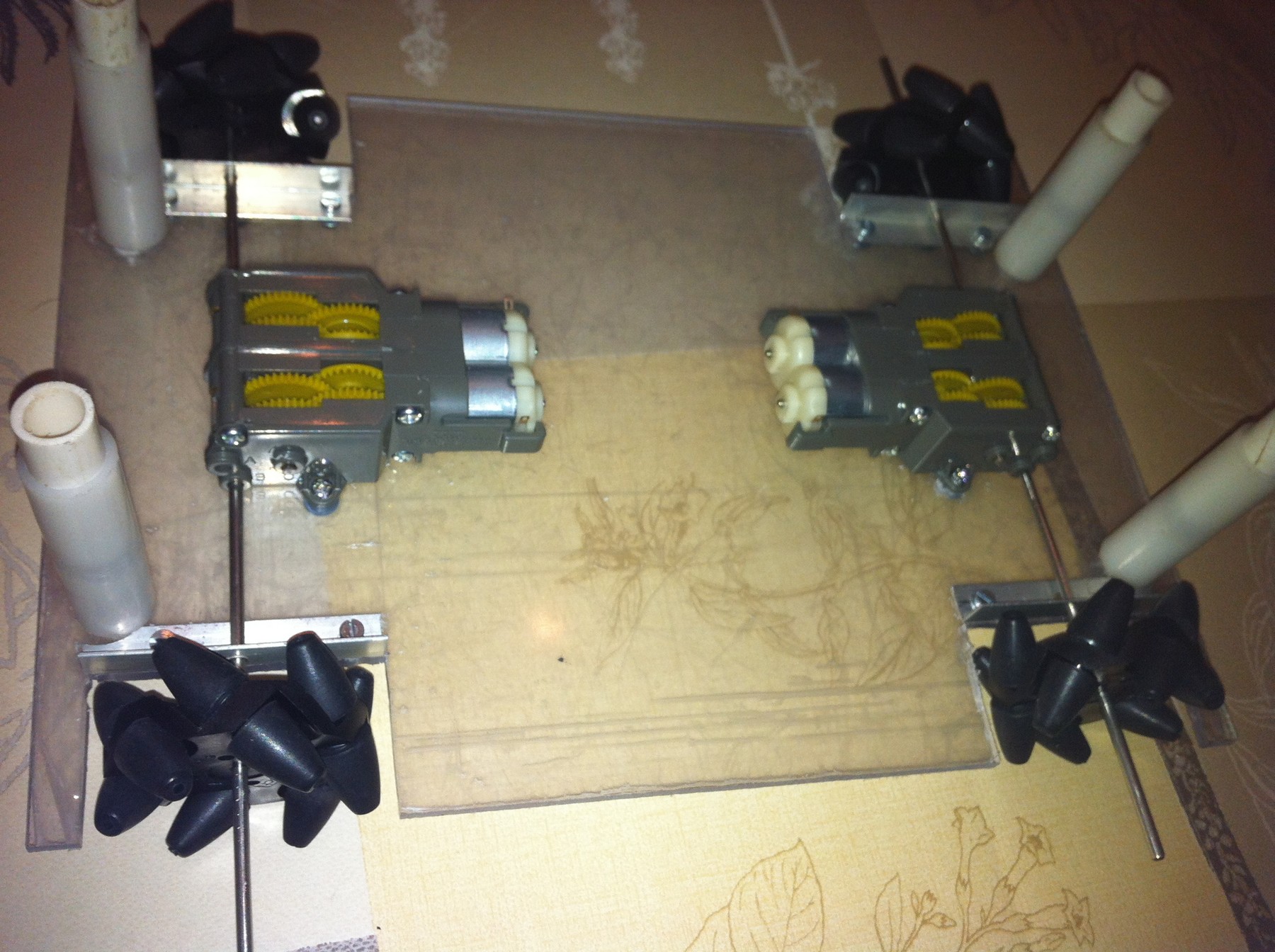
Des recherches plus approfondies sur le sujet m'ont amener aux Mecanum Wheels.
Points principaux développés : (Pas forcément étudier tout)
- Etudier l'influence de l'angle d'orientation des cylindres
- Essayer de trouver une loi d'entrée/sortie du mécanisme (4 entrées = moteur / 1 sortie = vitesse du robot)
- Regarder l'usure des pneus et la comparer à des pneus normaux
- Puis d'autres idées viendront je pense ('fin j'espère
 )
)--> Si quelqu'un a des idées je suis preneur

Expériences :
-Vérifier mes lois d'entrée/sortie
-Essayer de faire un système pour visualiser l'usure des pneus
--> Si quelqu'un a des idées je suis preneur
Contact avec entreprise
-Euh..... Aucun
--> Besoin d'aide pour trouver un contact dans le domaine, si quelqu'un sais qui (En France si possible
) a bien pu fabriquer de telles roues ou encore qui les a utilisés qu'il m'en informe svp .Matériel:
-Je n'ai rien et j'ai bien du mal à trouver de quoi me satisfaire
Ce que je recherche :
-Un robot tous fait qu'il reste juste à programmer (à moins de 100 euros)
-Des roues pas trop chère
Utilisations concrètes:
-Chariot élévateur dans des sortes d'entrepôts : Airtrax Cobra (cf: Ici)
-Fauteuil roulant pour handicapés (cf: Ici)
-Voiture du futur (Quoi c'est pas concret ça?
^^) (cf: Ici)Récapitulatif de ce que je vous demande:
-D'autres idées pour mon étude du système
-D'autres idées d'expériences ainsi que des idées d'amélioration de celles cités
-Un contact
-Des liens de site ou des lieux pour m'acheter le nécessaire
Voilà voilà je pense avoir été clair dans ma demande,
Merci d'avance pour vos réponses
.