


La base roulante du gros robot est enfin pratiquement finie ! (en tout cas la mécanique)
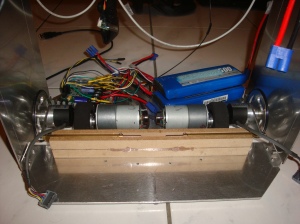
La base est en aluminium de 3mm avec 2 moteurs DC 12V ainsi que 2 encodeurs 1024cpr.
La fixation pour la rotation des codeurs a été faite en bois, car c'etait plus simple
 (étant donné qu'on voulait faire une piece ou l'on puisse inserer l'axe de force)
(étant donné qu'on voulait faire une piece ou l'on puisse inserer l'axe de force)Ce week-end, je commencerais à faire des calibrations pour l'odométrie, un week-end fun en perspective

Voyons voir les photos !
Voici tout d'abord le support codeur :

Et voici la base en entier avec les fixations en bois :

---------------
J'ai construit un des deux totem ce week end pour pouvoir tester le bras. Ce fut plus long que prévu ca casto vends du contreplaqué d'épaisseur théorique 18mm mais qui s'avere au final etre du 17mm... Il a donc fallu rajouter des petits morceaux de 1mm par ci par la.
Voici le résultat :


J'ai donc pu effecter quelques premiers tests de prise d'objets. Ce n'est que le début encore, les séquences de mouvement sont améliorable et la zone de stockage du robot n'est pas faite.
http://www.youtube.com/watch?v=0j3W7GjWJ2U
En parallele, j'ai bossé sur l'odométrie. Il reste a calibrer l'asservissement (du fun en perspective
).























