Salut @Levend
Le mien n'avance pas plus vite que le tient... et pourtant on ne joue pas dans la même cour... il était censé être simple pourtant !
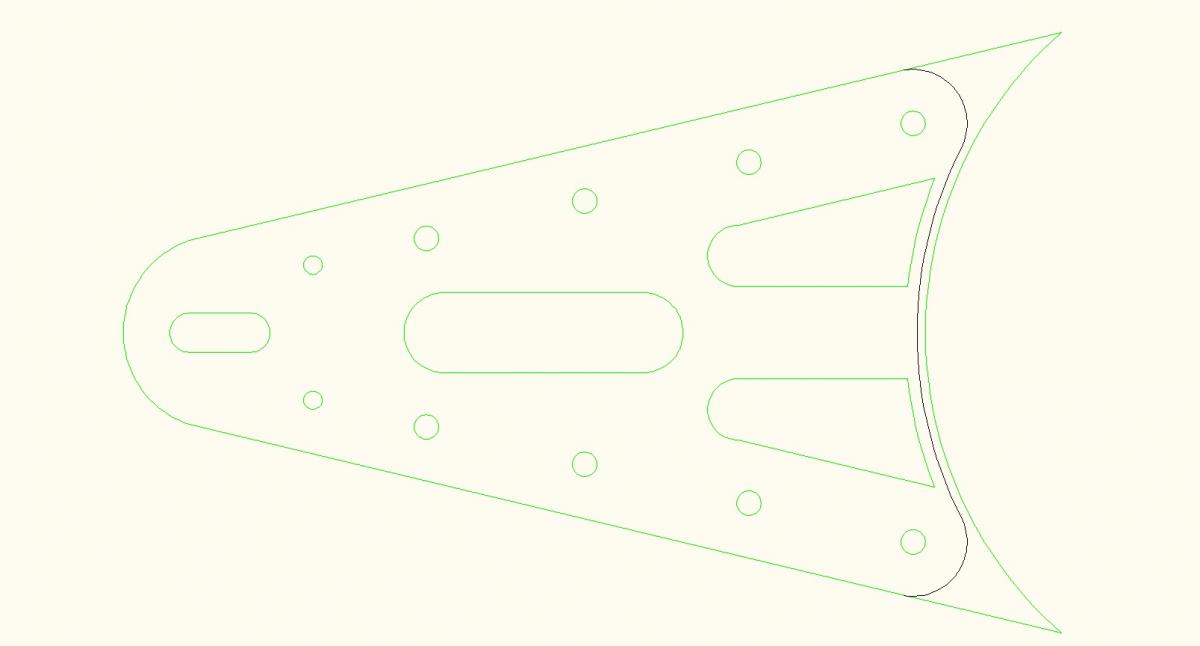
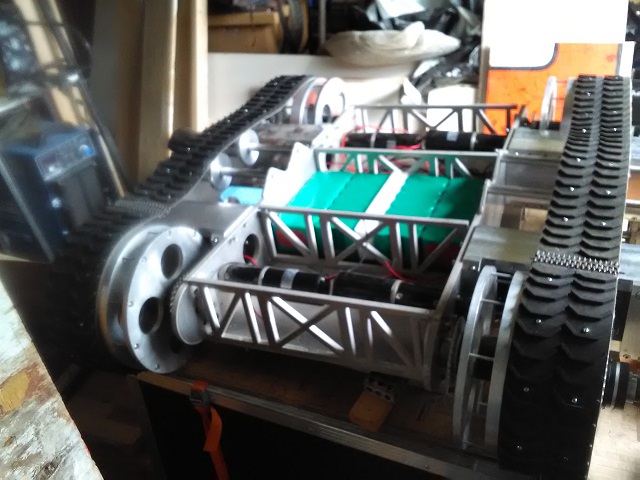
le premier demi chassis est imprimé mais il me manquait des vis pour terminer l'assemblage... que j'ai commandé et qui ont mis un certain temps à venir... c'est reçu, maintenant il faut trouver le temps de monter ça.
Au moment ou je te réponds je viens de terminer le montage d'une alim "de labo" à base de recup d'alim ATX... à tester demain si je trouve du temps...
Ensuite je ferais un test de chassis (avec moteur s'il vous plaît ^^) pour vérifier que les barbotins sont bien alignés et que la chaine ne déraille pas (ça ne te rappelle rien ? ^^). c'est la partie que je sens le moins dans l'affaire... si ça foire, je me poserais la question de l'abandon car le choix de l'impression 3d n'est peut être pas le bon ici... pas grave g progressé en fusion 360 avec ce projet, c'était un des objectifs...
de toute façon comme je t'avais dit : tant que j'ai pas une certitude que ça peut tenir la route, je ne poste pas sur robot maker...
une fois cela validé, impression du deuxième demi chassis et j'attaque la partie électronique + programmation (pour cette partie j'envisage l'utilisation de windows IOT que je ne connais pas du tout.... mais le principe du messaging de ROS me plaît bien, j'ai envie d'essayer... il me faut encore me documenter un peu avant d'arrêter un choix définitif)
J'ai toute l'électronique, mais il me reste à modéliser l'araignée qui va la supporter...
et comme je suis du genre dispersé, j'en ai commencé un second (robot), encore plus simple et encore plus low cost (par crédo mais aussi par contrainte malheureusement) :
lui est à base d'esp32Cam. Il doit être encore moins cher et surtout plus compact !.
et là même punition : j'attends des pièces commandées et qui vont mettre leur temps à venir (quand c'est gratuit c'est toi le produit, et quand c'est pas cher, les délais prennent cher ^^)
Pareil, quand je sens que ça vient, je poste (rien de sale, je vous rassure !!!) sur RM 
LA modélisation est commencée mais pas finalisée, j'ai besoin des pièces manquantes...
Sur ce second robot, la partie de la programmation qui me parassait la plus "touchy" est faite. J'ai donc terminé 50-70% de la partie software... il risque donc sortir avant l'autre que j'ai pourtant commencé avant... la dispersion, la dispersion :\
Mais j'avoue qu'avec la rentrée et une nouvelle organisation à mettre en place, rien n'avance :\
@+
Zav




 :
:


 ).
).



 .
.