
 ) :
) :
je prefere notifié que j'ai fait ca a l'arrache( mal de crane

 )
)qu'en pensez vous?
cordialement
rbot99

Membre passionné

Posté 20 juin 2012 - 10:24
) :
)Membre

Posté 20 juin 2012 - 10:28
dsl de mon absence sur mon sujet pour vous reconpencer (
[...]
qu'en pensez vous?
Mon site internet : http://ferdinandpiette.com/
Membre passionné
Posté 20 juin 2012 - 10:37
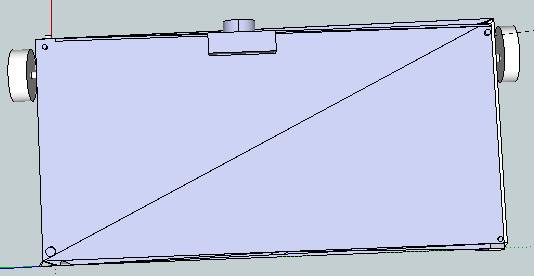
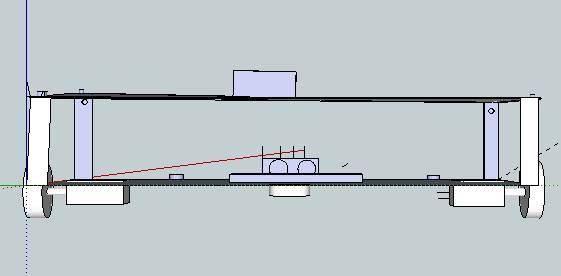
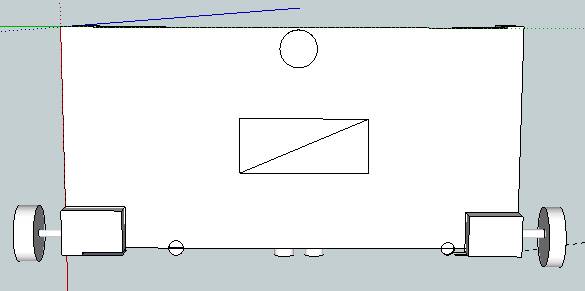
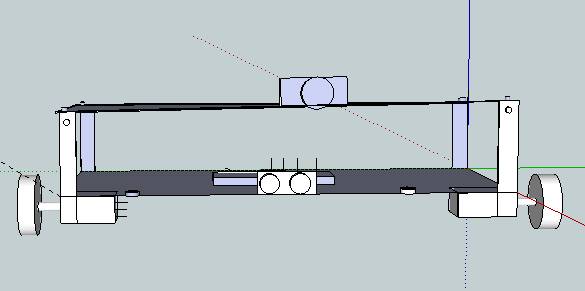
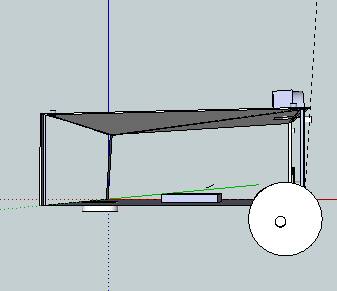
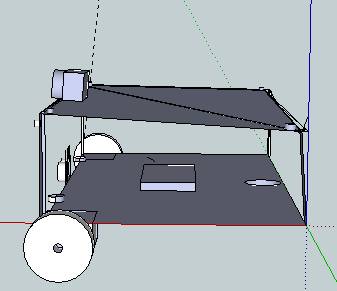
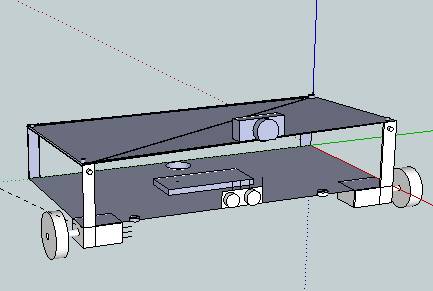
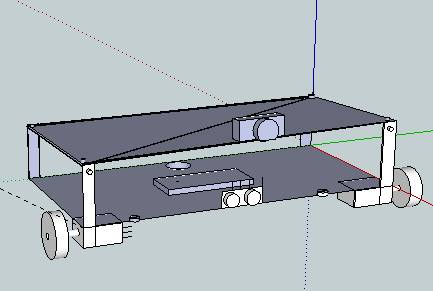
pour les roue je compte les laissé comme ceci,pour la roue folle je vais la surélever au besoin (un grand merci a black templar sans lequelle j'aurai fait une belle conner**)Google Sketchup, ça se voit tout de suite
Sinon moi j'aurais centré les roues.
Membre
Posté 21 juin 2012 - 06:10
et pout le logiciel c'est évidament google sketchup (j'essaye blender mais je n'y arrive pas!!)
Mon site internet : http://ferdinandpiette.com/
Membre chevronné

Posté 21 juin 2012 - 06:24
J'aime ce logiciel
Sauf quand il plante...

Sinon il y a des versions étudiantes (si l'école a plus d'un certain nombre de licence).
Membre chevronné

Posté 21 juin 2012 - 07:13
Oulah alors là j'en ai des pas mal à raconter... Dont les 3 annulés qui ont planter solidworks supprimant toutes mes avancées... Et surtout sur le modèle numérique du PPE : pièces qui changent de taille (des vis faites avec la toolbox), des contraintes qui disparaissent, des côtes qui étaient complètement fausses, des cercles non coaxiaux alors qu'ils étaient côtés de la même manière... Et encore j'en passe !toi aussi tu as eu le fameux crash en plein TP, celui qui t'oblige à tout recommencer en un minimum de temps alors que t'avais enfin réussi?
Membre passionné
Posté 23 juin 2012 - 11:03
#include <Servo.h>
#include <Ultrasonic.h>
#define TRIGGER_PIN 12
#define ECHO_PIN 13
Ultrasonic ultrasonic(TRIGGER_PIN, ECHO_PIN);
#define AVANT 1
#define ARRIERE 0
#define GAUCHE 2
#define DROITE 3
#define SERVOG 1
#define SERVOD 0
#define UPDDG 3
#define UPDDD 4
#define UPDDA 10
#define VMAX 5
Servo servog;
Servo servod;
int vLdr = 5;
int getNeutral(int s)
{
if(s == SERVOG)
return 86;
else
return 84;
}
void handleS(int s, int speed)
{
//Vitesse :
// 0 -> 0; 1 -> 1; 2 -> 3; 3 -> 8; 4 -> 10; v => 5 -> 30
int tab[6] = {0,1,3,8,10,30};
int pos = getNeutral(s);
int acc;
if (speed < 0)
acc = - tab[abs(speed)];
else
acc = tab[speed];
if(s == SERVOG)
servog.write(pos += acc);
else
servod.write(pos -= acc);
}
void move(int direction)
{
int m1 = 0, m2 = 0;
switch(direction)
{
case DROITE: m1 = 1; m2 = -1; break;
case GAUCHE: m1 = -1; m2 = 1; break;
case AVANT: m1 = 1; m2 = 1; break;
case ARRIERE: m1 = -1; m2 = -1; break;
}
handleS(SERVOG, m1*VMAX);
handleS(SERVOD, m2*VMAX);
}
void setup()
{
pinMode(UPDDG, INPUT);
pinMode(UPDDD, INPUT);
pinMode(UPDDA, INPUT);
Serial.begin(9600);
servog.attach(10);
servod.attach(9);
move(AVANT);
}
void loop()
{
float cmMsec, inMsec;
long microsec = ultrasonic.timing();
cmMsec = ultrasonic.convert(microsec, Ultrasonic::CM);
inMsec = ultrasonic.convert(microsec, Ultrasonic::IN);
Serial.print("MS: ");
Serial.print(microsec);
Serial.print(", CM: ");
Serial.print(cmMsec);
Serial.print(", IN: ");
Serial.println(inMsec);
delay(1000);
if(microsec <= 360)
{
handleS(SERVOG, 0);
handleS(SERVOD, VMAX);
delay(1500);
}else
{
handleS(SERVOG, VMAX);
handleS(SERVOD, VMAX);
}
if(UPDDD, LOW)
{
move(ARRIERE);
delay(300);
move(DROITE);
delay(900);
}else if(UPDDA, LOW)
{
handleS(SERVOG, 0);
handleS(SERVOD, VMAX);
}
else
{
handleS(SERVOG, VMAX);
handleS(SERVOD, VMAX);
}
if(UPDDG, LOW)
{
move(ARRIERE);
delay(300);
move(GAUCHE);
delay(900);
}
else if(UPDDA, LOW)
{
handleS(SERVOG, 0);
handleS(SERVOD, VMAX);
}
else
{
handleS(SERVOG, VMAX);
handleS(SERVOD, VMAX);
}
}
et voila!!
Membre chevronné

Posté 24 juin 2012 - 12:35

Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
Membre passionné
Posté 24 juin 2012 - 01:03
#include <Servo.h>
#include <Ultrasonic.h>
#define TRIGGER_PIN 12
#define ECHO_PIN 13
Ultrasonic ultrasonic(TRIGGER_PIN, ECHO_PIN);
#define AVANT 1
#define ARRIERE 0
#define GAUCHE 2
#define DROITE 3
#define SERVOG 1
#define SERVOD 0
#define UPDDG 3
#define UPDDD 4
#define UPDDA 10
#define VMAX 5
Servo servog;
Servo servod;
int vLdr = 5;
int getNeutral(int s)
{
if(s == SERVOG)
return 86;
else
return 84;
}
void handleS(int s, int speed)
{
//Vitesse :
// 0 -> 0; 1 -> 1; 2 -> 3; 3 -> 8; 4 -> 10; v => 5 -> 30
int tab[6] = {0,1,3,8,10,30};
int pos = getNeutral(s);
int acc;
if (speed < 0)
acc = - tab[abs(speed)];
else
acc = tab[speed];
if(s == SERVOG)
servog.write(pos += acc);
else
servod.write(pos -= acc);
}
void move(int direction)
{
int m1 = 0, m2 = 0;
switch(direction)
{
case DROITE: m1 = 1; m2 = -1; break;
case GAUCHE: m1 = -1; m2 = 1; break;
case AVANT: m1 = 1; m2 = 1; break;
case ARRIERE: m1 = -1; m2 = -1; break;
}
handleS(SERVOG, m1*VMAX);
handleS(SERVOD, m2*VMAX);
}
void setup()
{
pinMode(UPDDG, INPUT);
pinMode(UPDDD, INPUT);
pinMode(UPDDA, INPUT);
Serial.begin(9600);
servog.attach(10);
servod.attach(9);
move(AVANT);
}
void loop()
{
float cmMsec, inMsec;
long microsec = ultrasonic.timing();
cmMsec = ultrasonic.convert(microsec, Ultrasonic::CM);
inMsec = ultrasonic.convert(microsec, Ultrasonic::IN);
Serial.print("MS: ");
Serial.print(microsec);
Serial.print(", CM: ");
Serial.print(cmMsec);
Serial.print(", IN: ");
Serial.println(inMsec);
delay(1000);
if(microsec <= 360)
{
handleS(SERVOG, 0);
handleS(SERVOD, VMAX);
delay(1500);
}else
{
handleS(SERVOG, VMAX);
handleS(SERVOD, VMAX);
}
if(UPDDD, HIGH)
{
move(ARRIERE);
delay(300);
move(DROITE);
delay(900);
}else if(UPDDA, HIGH)
{
handleS(SERVOG, 0);
handleS(SERVOD, VMAX);
}
else
{
handleS(SERVOG, VMAX);
handleS(SERVOD, VMAX);
}
if(UPDDG, HIGH)
{
move(ARRIERE);
delay(300);
move(GAUCHE);
delay(900);
}
else if(UPDDA, HIGH)
{
handleS(SERVOG, 0);
handleS(SERVOD, VMAX);
}
else
{
handleS(SERVOG, VMAX);
handleS(SERVOD, VMAX);
}
}
Membre chevronné

Posté 24 juin 2012 - 03:09
... et il restera apparemment encore un souci que je n'ai pas encore trouvé.long microsec = ultrasonic.Timing();
Serial.print("MS: ");
Serial.print(microsec);
Serial.print(", CM: ");
Serial.print(ultrasonic.Ranging(CM));
Serial.print(", IN: ");
Serial.println(ultrasonic.Ranging(INC));
delay(1000);
Membre chevronné
Posté 24 juin 2012 - 03:11
Je crois que tu devrais déjà remplacer les lignes correspondantes par ça :
... et il restera apparemment encore un souci que je n'ai pas encore trouvé.
(j'espère qu'on a bien la même version de la lib ultrasonic).

Membre passionné
Posté 24 juin 2012 - 04:51
mais je ne comprend pas...quand je compile il me dit que mon code est bon...comme disait Jbot, le souci est dans le if...
Indice supplémentaire en général dans un if, il faut un opérateur
Membre chevronné
Posté 24 juin 2012 - 06:26
Moi quand je fais une vérification avec le logiciel de dev arduino_1.0.1 il trouve des erreurs.mais je ne comprend pas...quand je compile il me dit que mon code est bon...
Membre chevronné
Posté 24 juin 2012 - 01:55
Ce n'est pas parce qu'un code compile qu'il fonctionne, loiiiiiinnnnnnnn de la !mais je ne comprend pas...quand je compile il me dit que mon code est bon...
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
Membre passionné
Posté 24 juin 2012 - 06:17
merci de vos réponses,j'ai peut être trouvé le probleme:Ce n'est pas parce qu'un code compile qu'il fonctionne, loiiiiiinnnnnnnn de la !









0 members, 1 guests, 0 anonymous users








