*Prend sa pelle*
*Creuse parmi les topics*
"TOC"
Ah enfin !
Époussette la couche de messages pour réveler un vieux topic poussièreux : "Froggy, la grenouille robotique mutante"
Il est temps de déterrer ce vieux topic !
------
Un nouvelle mise à jour de Froggy, quasiment 3 ans plus tard. Cette fois-ci, je ne ferais pas un topic de blog, autant se servir de ce forum pour discuter, ça sera plus visible.
Depuis sa dernière évolution, Froggy ressemblait à ça (
le billet de blog correspondant):

C'était déjà pas mal vu le point de départ, mais il est temps d'améliorer les choses. Premier défaut, la perception des distances. J'en avais parlé sur un autre topic, mais un capteur ultrason sur servo qui va de droite à gauche provoque des différences dans le timestamp des mesures de distance (le moment où la mesure a été faite). Bien que Froggy n'aille pas à des vitesses critiques, ça reste médiocre au moins dans le principe si on veut un comportement réactif : l'architecture que j'utilise suppose qu'on a deux mesures simultanées, pour calculer la commande motrice à appliquer sur les roues. Si le robot reste statique entre deux mesures, pas de soucis, mais ça n'est bien évidemment pas ce que je veux. Et dans mon cas, Froggy bouge entre deux mesures, dont à terme, ses déplacements risquent de ne pas être très cohérents. Second défaut, cette construction de bric et de broc n'est ni propre, ni fiable : en dehors de l'aspect visuel horrible, j'ai déjà eu la situation où un câble des moteurs se débranche en live, d'où immobilisation de la bête (on voit ça à la fin de la vidéo sur le post de blog).
Définissons donc un certain nombre d'objectifs à atteindre avec Froggy 3.0 :
- la mesure de distance aux obstacles doit être (quasi-)simultanée pour tous les capteurs. Froggy doit pouvoir mesurer ces distances devant, sur les côtés et derrière (donc un minimum de 4 capteurs) pour pouvoir reculer et se réorienter sans danger.
- les intérieurs du robot doivent être bien organisés pour assurer des connexions qui résistent aux chocs, des composants bien fixés qui ne bougent pas.
- Au lieu de consommer des piles 1.5V et 9V, Froggy doit tourner sur batterie avec un autonomie supérieure à 1h.
- Froggy doit accueillir à terme une Raspberry (ou tout autre nanoPC) pour pouvoir utiliser une camera et ros_control (et ROS en général). La caméra ira dans une tourelle pan-tilt pour faire une "tête".
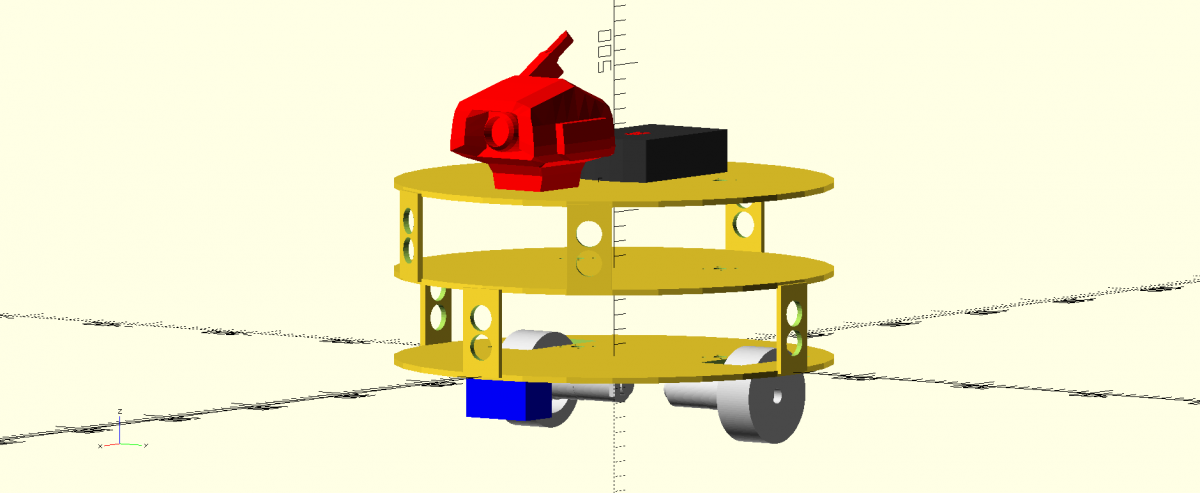
Du coup, j'ai commencé à designer dans OpenScad une nouvelle base qui sera découpée au laser dans du bois (d'où mon post d'il y a quelques mois). C'est très basique pour l'instant, mais le poster me motivera

D'ailleurs, je n'ai pas trouvé de modèle openscad pour les moteurs que j'envisage d'utiliser (
les GM25 370 ca de la boutique ), si quelqu'un les a ou au moins des fichiers stl à importer, ça accélérera le processus pour moi.
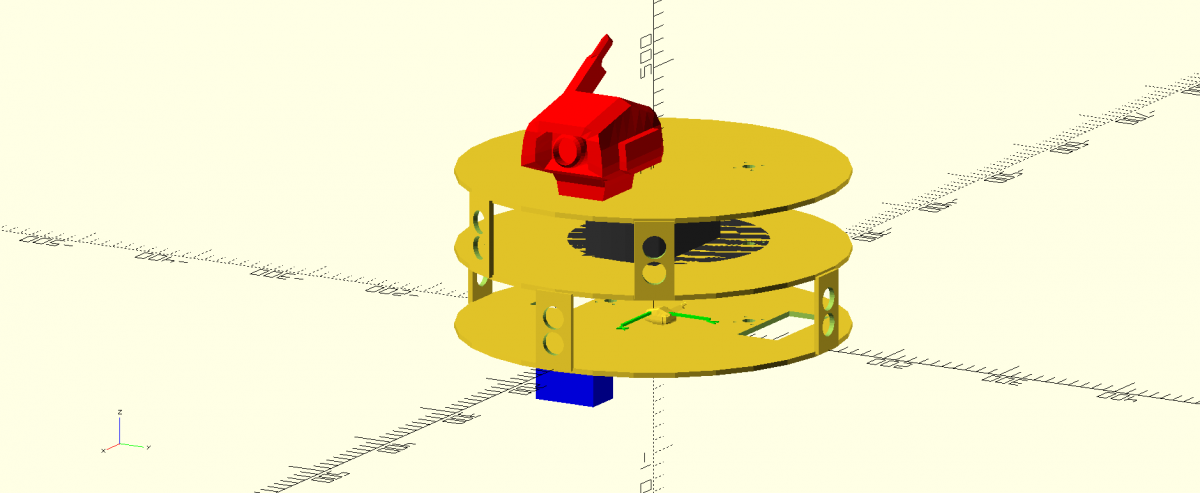
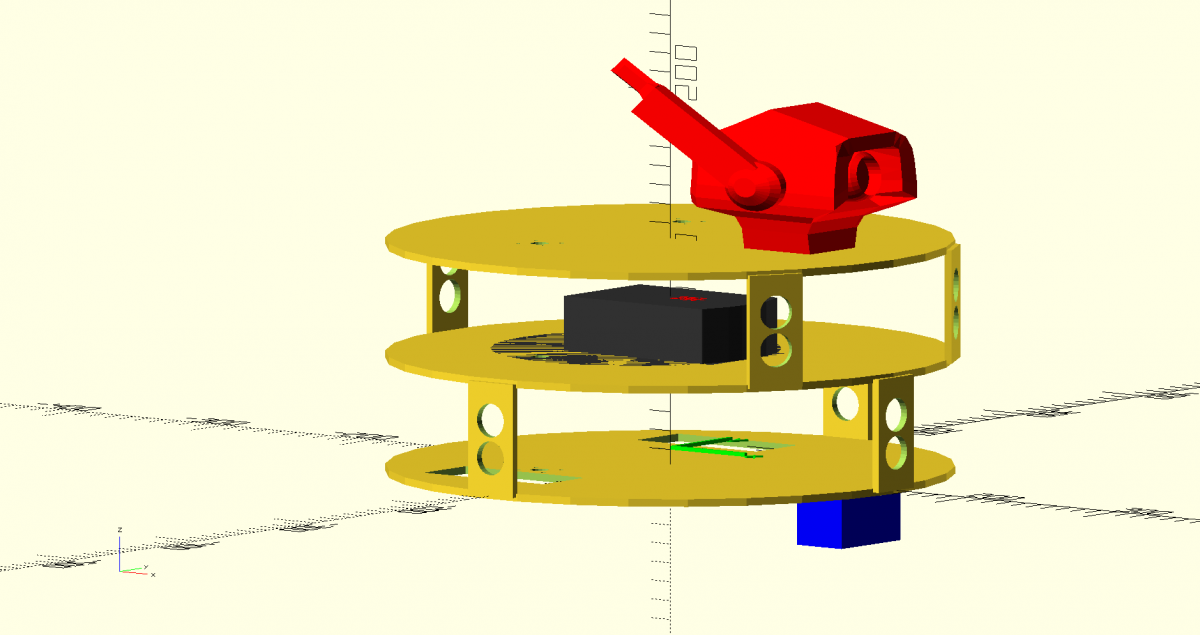
La base est un peu plus large que la précédente : 30 cm de diamètre contre ~20 avant (mais le châssis DFRobot n'était pas vraiment circulaire). Les supports verticaux accueilleront 6 capteurs ultrasons, et l'excroissance bleue sert à supporter la roue folle que je récupère du châssis précédent. La boîte noire au milieu est la Raspberry dans son boîtier, la tête est récupérée de
ce modèle d'exo-armure Tau, pour donner un peu une idée du style auquel j'aimerais arriver à la fin (quelque chose entre ça et Chappie).
Stay tuned for next update (dans moins de 3 ans cette fois) !



 ), je créé ce topic pour rassembler et indexer les différents billets, et discuter sur mon projet de robot mobile 2WD, Froggy.
), je créé ce topic pour rassembler et indexer les différents billets, et discuter sur mon projet de robot mobile 2WD, Froggy.













 )
)  Genre ça pourrait être un tuto de référence pour commencer ROS
Genre ça pourrait être un tuto de référence pour commencer ROS