OK pour la première partie, mais...
NON! Une centrale inertielle n'a rien à voir avec l'odométrie! Ce sont 2 choses complètement différentes! Les odomètres sur un robot à roues sont toujours les mesures de déplacement par mesure de l'avancement de 2 roues ou plus.
Leon.
http://wiki.ros.org/robot_pose_ekf On peut tout à fait estimer un déplacement à l'aide d'une centrale inertielle. C'est une méthode sujette à la dérive, de même que l'intégration au cours du temps sur les déplacements imposés par les roues.
Et que ma réponse soit juste, fausse, imprécise, incomplète, j'apprécierais que tu sois un peu plus aimable quand tu réponds. Je suis prêt à reconnaître mes erreurs et à apprendre, mais je n'accepte pas de me faire traiter comme un ignorant qui raconte n'importe quoi. Les gens sont ici pour se détendre et discuter, le but c'est de progresser. Un peu de pédagogie et de patience sont les bienvenues.
@Machichi :
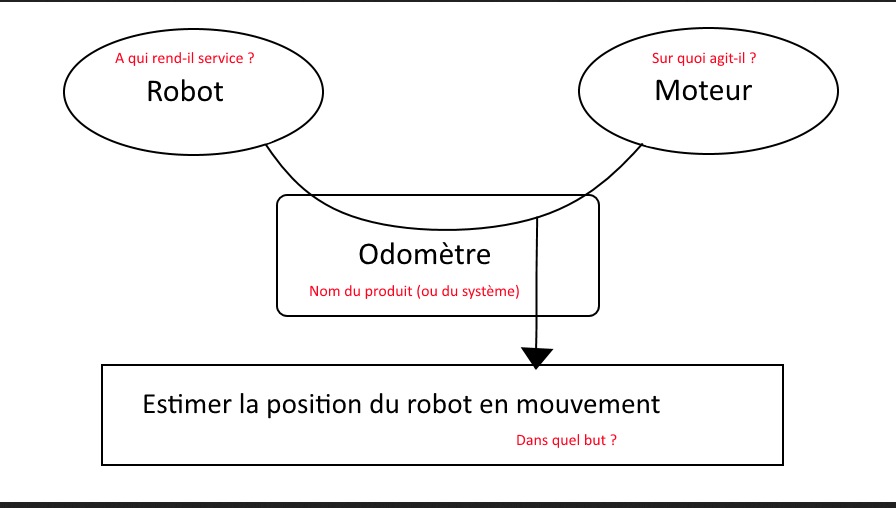
Si j'ai bien compris, l'odométrie permet de connaître l'itinéraire parcouru par le robot ?
Elle permet au robot d'estimer son
itinéraire déplacement. Mais rien n'est vraiment jamais sûr pour le robot. Une analogie : on te met dans une pièce, on bande tes yeux, on te couvre les oreilles, on te fait tourner un peu sur toi-même, puis tu dois avancer. Tu as une idée de la direction globale dans laquelle tu vas, de la distance que tu parcours, mais tu n'es jamais vraiment sûr que tu n'es pas plus proche ou plus loin du mur que tu le penses. Cependant, tu sais que si tu as fait trois pas, tu t'es déplacé d'à peu près 2m (c'est un exemple). Pour le robot, c'est pareil : il sait qu'il a tourné ses roues pour avancer d'un mètre, mais peut-être que ses roues ont glissé, et il n'a fait en fait que 80cm. Par contre, si on enlève ton bandeau des yeux, tu peux voir ton environnement et corriger l'endroit où tu pensais être ("ah, en fait, j'ai faili me cogner dans cette table"). Pour le robot, c'est pareil, si tu lui donnes un moyen de percevoir son environnement (caméra, laser), il peut corriger son estimation de déplacement pour connaître sa position plus précisément.
L'asservissement en vitesse permet de modifier la vitesse d'un moteur ?
Par exemple si il y a un obstacle devant le robot, il faudra modifier la vitesse d'un des deux moteurs pour que le robot tourne, est-ce bien ça ?
L'asservissement en vitesse permet d'être sûr que le moteur ou la roue tourne à la vitesse voulue. Ce qui impose la vitesse à ton moteur, c'est la commande (électrique) que tu lui envoies. Mais parce que deux moteurs ne sont pas exactement pareil, si tu leur envoies la même commande (je veux que vous tourniez à 1 tr/s, ce qui est traduit en tension à envoyer vers les moteurs - je ne détaille pas), l'un peut tourner à 1.1 tr/s et l'autre à 0.9 tr/s. Asservir les moteurs en vitesse, ça veut dire mesurer cette vitesse et corriger la commande électrique pour que ton moteur tourne bien à 1 tr/s. Si le code dans ton robot le permet, tu peux tester de leur demander la même vitesse : si les moteurs sont asservis en vitesse, le robot devrait aller droit. Si ça n'est pas le cas, il va tourner plus vite d'un côté que de l'autre.
Mais attention ! ça n'est pas avec ça que tu fais tourner ton robot face à un obstacle. Si un autre capteur voit un obstacle, ce sera à toi de définir ce que fait le robot : tourner à gauche, tourner à droite, s'arrêter. Si ça rentre dans le cadre de ton TPE, je t'invite à faire un programme pour éviter les obstacles comme tu le penses, puis à chercher "Véhicule de Braitenberg" pour comparer ta méthode et la sienne

Aussi, je suis allé lire la partie 8 de la notice du robot (http://www.produktinfo.conrad.com/datenblaetter/175000-199999/191919-an-01-fr-robot_prog.pdf)
et je n'ai que trouvé cette ligne qui pourrait être intéressante:
Les diodes luminescentes et le phototransistor (avec barrage optique réflexe pour lodométrie)
Mais je ne comprend toujours pas ce qu'ils appellent "odomètre"; les odomètres sont donc l'ensemble que forme les Diodes et les photo transistors ?
J'ai aussi lu autre part dans la notice que le robot possède 2 capteurs de tours au niveau des roues, c'est ça un odomètre ?
En fait, on est dans le premier cas que j'ai cité : on mesure la vitesse de chaque roue (ou chaque moteur). Et la question que tu dois te poser, c'est comment mesurer la vitesse de rotation d'un axe ? Si tu regardes un peu comment fonctionnent les capteurs que tu cites, tu devrais avoir une petite idée.