Bonjour, bonsoir,
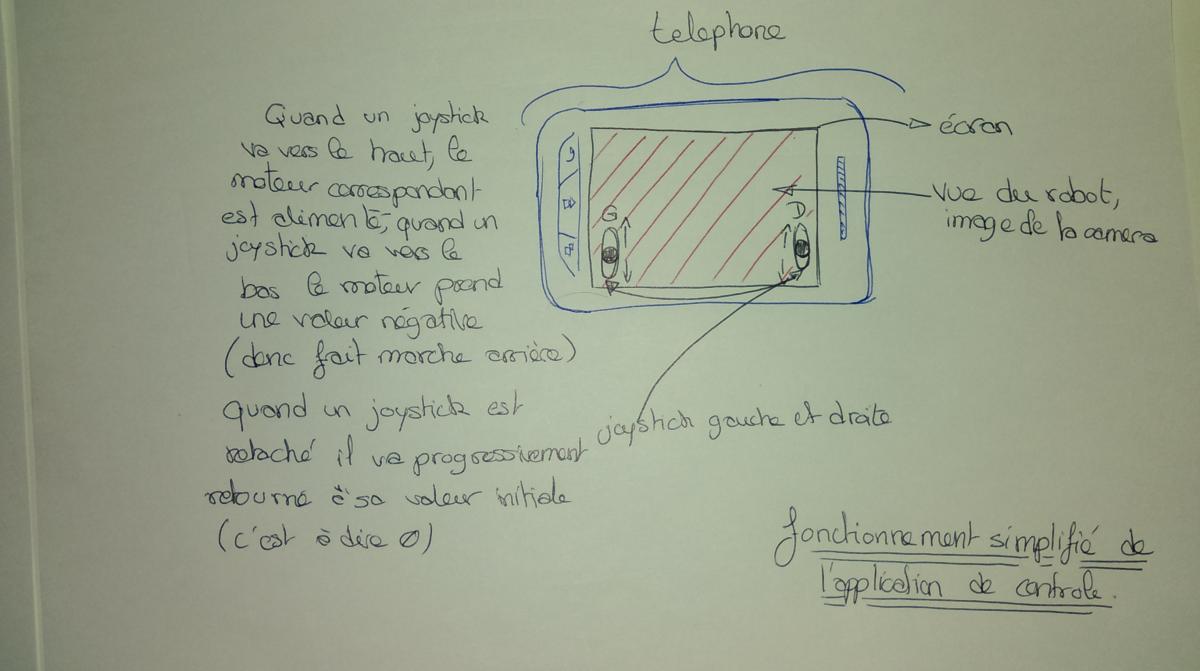
a tous, je travail actuellement sur un petit robot, nomme "Kbot", a partir d'une carte Raspberry PI model A, pour sa premiere version j'avais pour idee de pouvoir le controler via mon smartphone, puis dans une evolution futur lui implementer un systeme de guidage et un systeme de suivit du proprietaire.
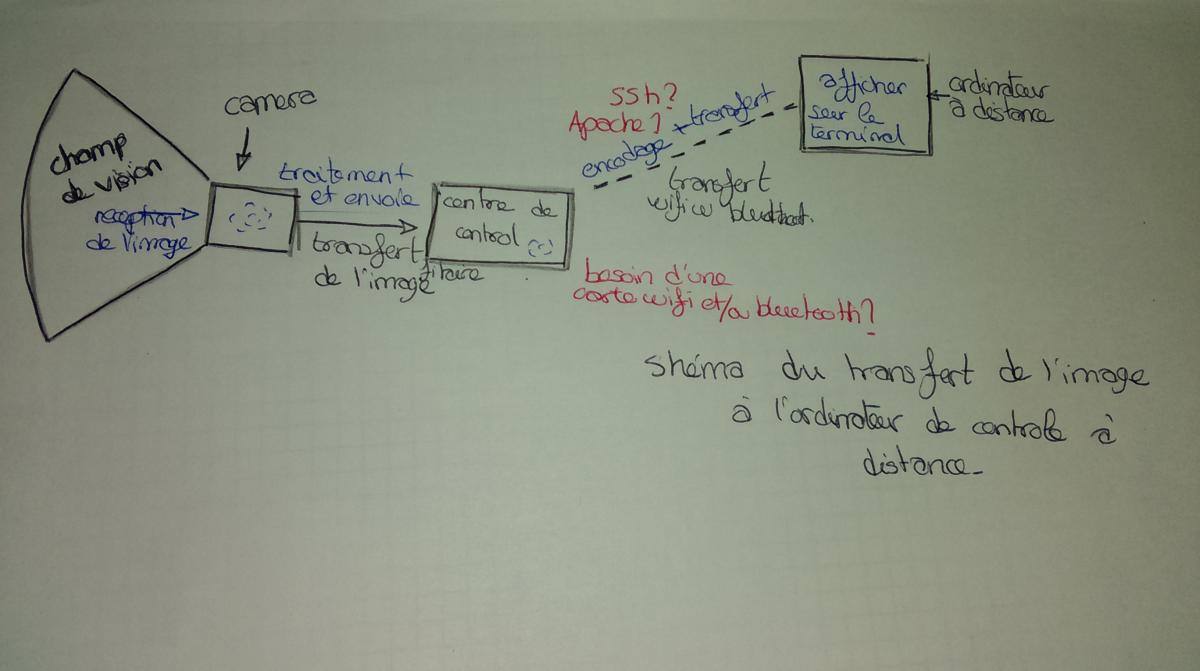
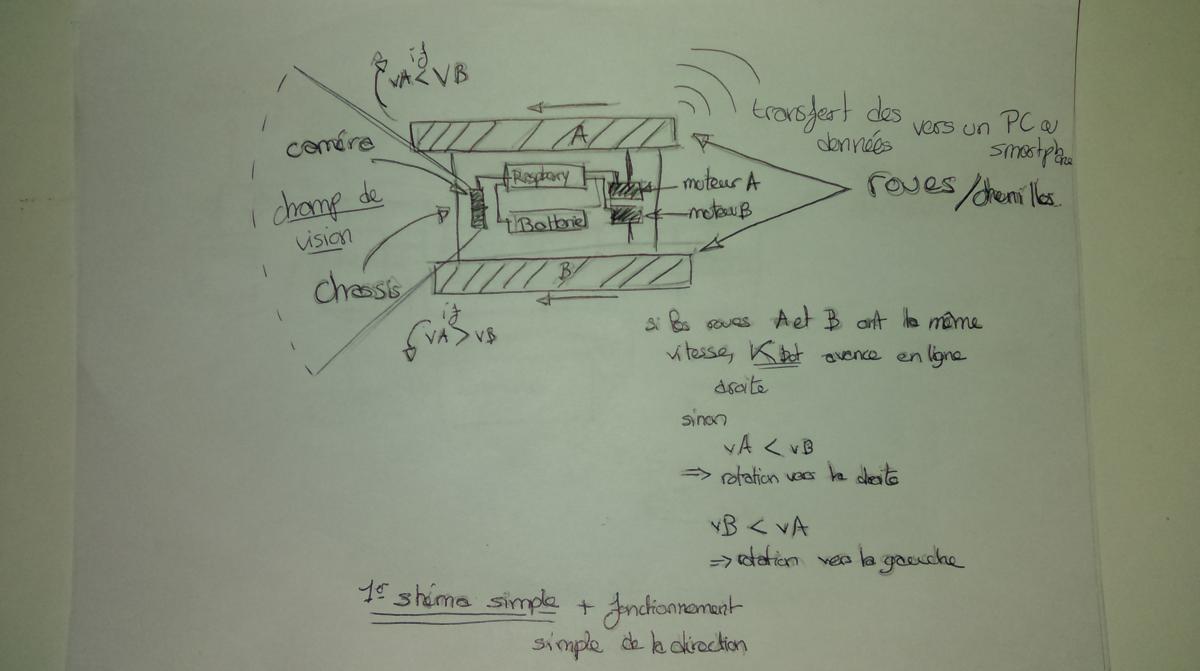
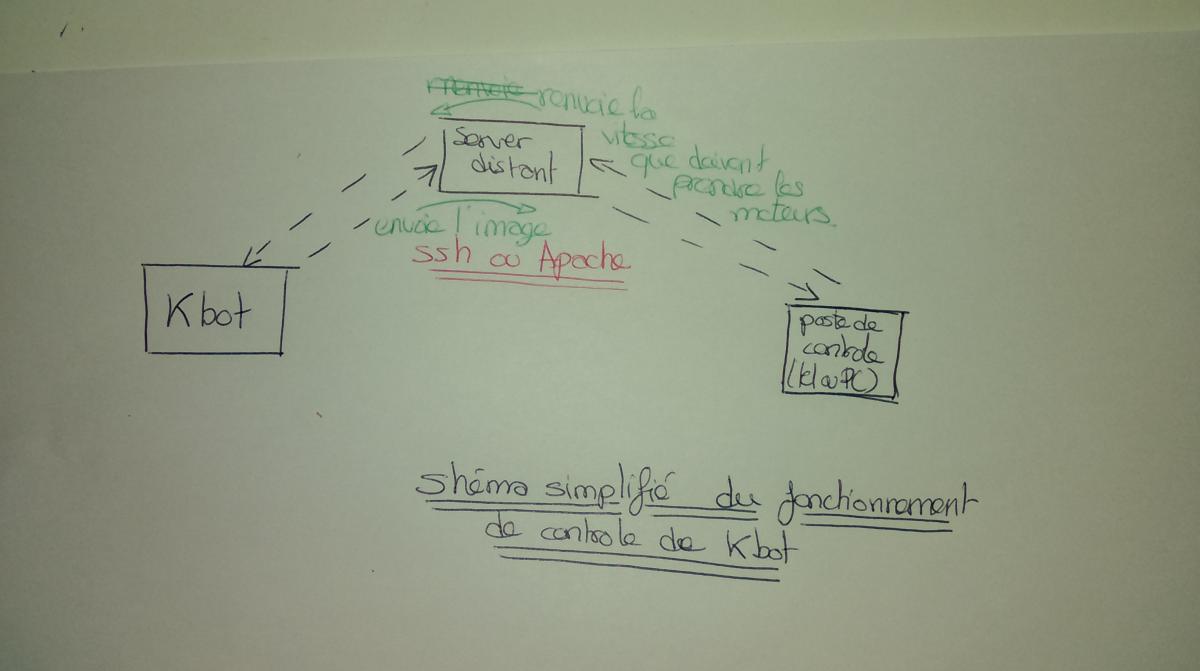
Pour l'instant ma plus grande interrogation est de savoir comment relier Kbot au smartphone, j'avais envisager d'utiliser le reseau bluetooth mais je ne sais pas pour le moment si un controle total est possible, (par controle total je pense surtout a l'utilisatiuon du materiel du robot a distance : mise en route des moteurs, recuperation de l'image "vue" par Kbot, etc...). A votre avis est-ce envisageable ?
Je ne suis encore que a la phase de prereflexion, je partagerais les differents shemas, dessins techniques et codes sources lors de la phase de developpement, en attendant si vous avez des suggestions a me faire, notament pour le materiel a utiliser (carte mere, moteur, chassis, camera, etc...)
je suis prenneur.
Bonne continuatiuon a vous, fan de robotique