

Il fallait bien commencer par un début et ce fut une voiture télécommandée :
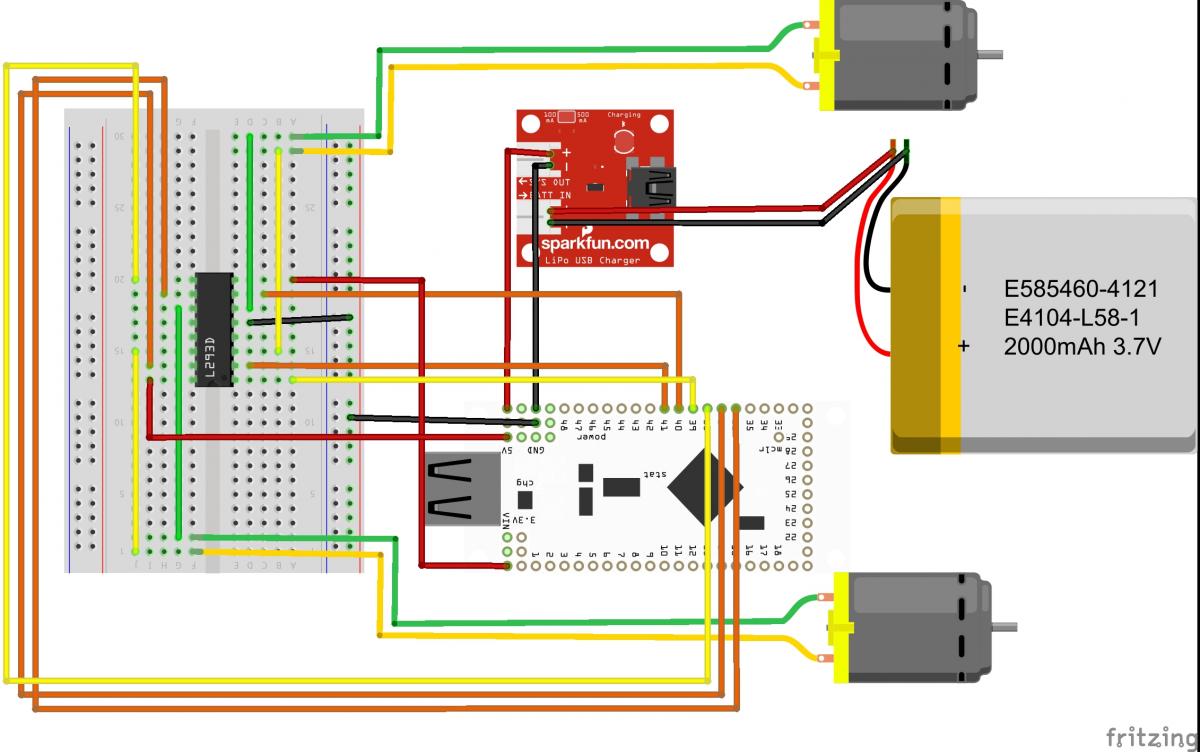
La Base :
- IOIO-OTG
- Circuit intégré Pont H : L293D (voir aussi : http://arduino103.blogspot.fr/2011/06/controle-moteur-dc-via-l293d-h-bridge.html)
- 2 moteurs CC 6V
- Carte chargeur LiPo Pro POW12059P
- Accu Li-Ion 3,7 V 2000 mAh
Pour plus de détail sur les composants : http://www.robot-maker.com/forum/blog/55/entry-44-les-composants-dailgor-bot/
Les schémas :
Enfin le code : https://github.com/ailgorbot/AilgorRC
Il y a évidement 4 boutons (left, right, up, down) à créer sur votre MainActivity (voir le fichier AndroidManifest.xml dans GitHub)
package fr.ailgor.ailgorrc;
import android.os.Bundle;
import android.view.Menu;
import android.view.MenuItem;
import android.view.MotionEvent;
import android.view.View;
import android.widget.Button;
import android.widget.Toast;
import android.widget.ToggleButton;
import ioio.lib.api.DigitalOutput;
import ioio.lib.api.PwmOutput;
import ioio.lib.api.exception.ConnectionLostException;
import ioio.lib.util.BaseIOIOLooper;
import ioio.lib.util.IOIOLooper;
import ioio.lib.util.android.IOIOActivity;
public class MainActivity extends IOIOActivity {
private ToggleButton toggleButtonLedSTAT;
protected Button buttonLeft;
protected Button buttonRight;
protected Button buttonUp;
protected Button buttonDown;
private boolean motorLeft=false;
private boolean motorRight=false;
private float speed = 0;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
toggleButtonLedSTAT = (ToggleButton)findViewById(R.id.toggleButtonLedSTAT);
buttonLeft = (Button) findViewById((R.id.buttonLeft));
buttonRight = (Button) findViewById((R.id.buttonRight));
buttonUp = (Button) findViewById((R.id.buttonUp));
buttonDown = (Button) findViewById((R.id.buttonDown));
enableUi(false);
buttonLeft.setOnTouchListener(new View.OnTouchListener() {
@Override
public boolean onTouch(View v, MotionEvent event) {
if ((event.getAction() == MotionEvent.ACTION_MOVE)||(event.getActionMasked()!=MotionEvent.ACTION_UP))
{
motorLeft = false;
motorRight = false;
speed = (float)0.5;
}
else
speed = 0;
return false;
}
});
buttonRight.setOnTouchListener(new View.OnTouchListener() {
@Override
public boolean onTouch(View v, MotionEvent event) {
if ((event.getAction() == MotionEvent.ACTION_MOVE)||(event.getActionMasked()!=MotionEvent.ACTION_UP))
{
motorLeft = true;
motorRight = true;
speed = (float)0.5;
}
else
speed = 0;
return false;
}
});
buttonUp.setOnTouchListener(new View.OnTouchListener() {
@Override
public boolean onTouch(View v, MotionEvent event) {
if ((event.getAction() == MotionEvent.ACTION_MOVE)||(event.getActionMasked()!=MotionEvent.ACTION_UP))
{
motorLeft = false;
motorRight = true;
speed = 1;
}
else
speed = 0;
return false;
}
});
buttonDown.setOnTouchListener(new View.OnTouchListener() {
@Override
public boolean onTouch(View v, MotionEvent event) {
if ((event.getAction() == MotionEvent.ACTION_MOVE)||(event.getActionMasked()!=MotionEvent.ACTION_UP))
{
motorLeft = true;
motorRight = false;
speed = (float)0.5;
}
else
speed = 0;
return false;
}
});
} // End onCreate
private void enableUi(final boolean enable) {
runOnUiThread(new Runnable() {
@Override
public void run() {
toggleButtonLedSTAT.setEnabled(enable); // the toggleButton is disable
toggleButtonLedSTAT.setChecked(enable); // switch on the toggleButton
if (enable)
Toast.makeText(MainActivity.this, getString(R.string.IOIOConnected), Toast.LENGTH_LONG).show();
else
Toast.makeText(MainActivity.this, getString(R.string.IOIODisconnected), Toast.LENGTH_LONG).show();
}
});
} // End enableUi
@Override
protected IOIOLooper createIOIOLooper() {
return new Looper();
} // End IOIOLooper
class Looper extends BaseIOIOLooper{
// Declare PIN
private DigitalOutput PinDO0; // LED STAT
// Motor DC : Right
private DigitalOutput PinDIO36; // L293D In 3
private DigitalOutput PinDIO37; // L293D In 4
private PwmOutput PinPWM38; // L293D Enable 2
// Motor DC : Left
private DigitalOutput PinDIO40; // L293D In 2
private DigitalOutput PinDIO41; // L293D In 1
private PwmOutput PinPWM39; // L293D Enable 1
@Override
protected void setup() throws ConnectionLostException, InterruptedException {
// super.setup();
// Assign PIN
// LED STAT
PinDO0 = ioio_.openDigitalOutput(0, true);
// Motor DC : Right
PinDIO36 = ioio_.openDigitalOutput(36);
PinDIO37 = ioio_.openDigitalOutput(37);
PinPWM38 = ioio_.openPwmOutput(38,100);
// Motor DC : Left
PinDIO40 = ioio_.openDigitalOutput(40);
PinDIO41 = ioio_.openDigitalOutput(41);
PinPWM39 = ioio_.openPwmOutput(39,100);
enableUi(true); // Start IOIO
} // End setup
@Override
public void loop() throws ConnectionLostException, InterruptedException {
// super.loop();
PinDO0.write(!toggleButtonLedSTAT.isChecked());
PinPWM39.setDutyCycle(speed);
PinDIO41.write(motorLeft);
PinDIO40.write(!motorLeft);
PinPWM38.setDutyCycle(speed);
PinDIO37.write(motorRight);
PinDIO36.write(!motorRight);
try {
Thread.sleep(10);
} catch (InterruptedException e)
{
e.printStackTrace();
}
} // End Loop
@Override
public void disconnected() {
// super.disconnected();
enableUi(false);
toggleButtonLedSTAT.setEnabled(false); // the toggleButton is disable
toggleButtonLedSTAT.setChecked(false); // switch off the toggleButton
Toast.makeText(MainActivity.this,getString(R.string.IOIODisconnected),Toast.LENGTH_LONG).show();
} // End disconnected
} //End Looper
@Override
public boolean onCreateOptionsMenu(Menu menu) {
getMenuInflater().inflate(R.menu.menu_main, menu);
return true;
} // End onCreateOptionsMenu
@Override
public boolean onOptionsItemSelected(MenuItem item) {
int id = item.getItemId();
//noinspection SimplifiableIfStatement
if (id == R.id.action_settings) {
return true;
}
return super.onOptionsItemSelected(item);
} // End onOptionsItemSelected
}
La vidéo :






















