Petite vidéo de l'assemblage du pied
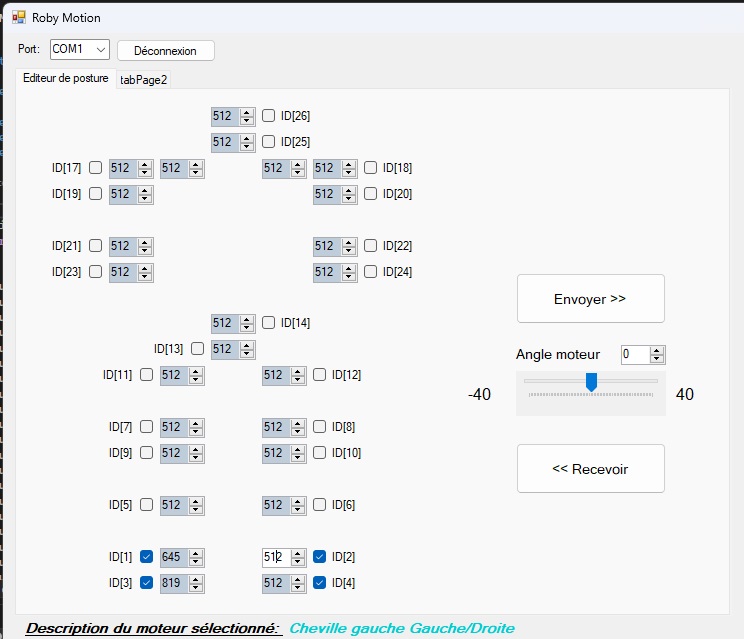
La cheville à un angle d'action de 90° pour l'axe Gauche/Droite (-45° à 45°) et 100° pour l'axe Avant/Arrière (-50° à 50°)




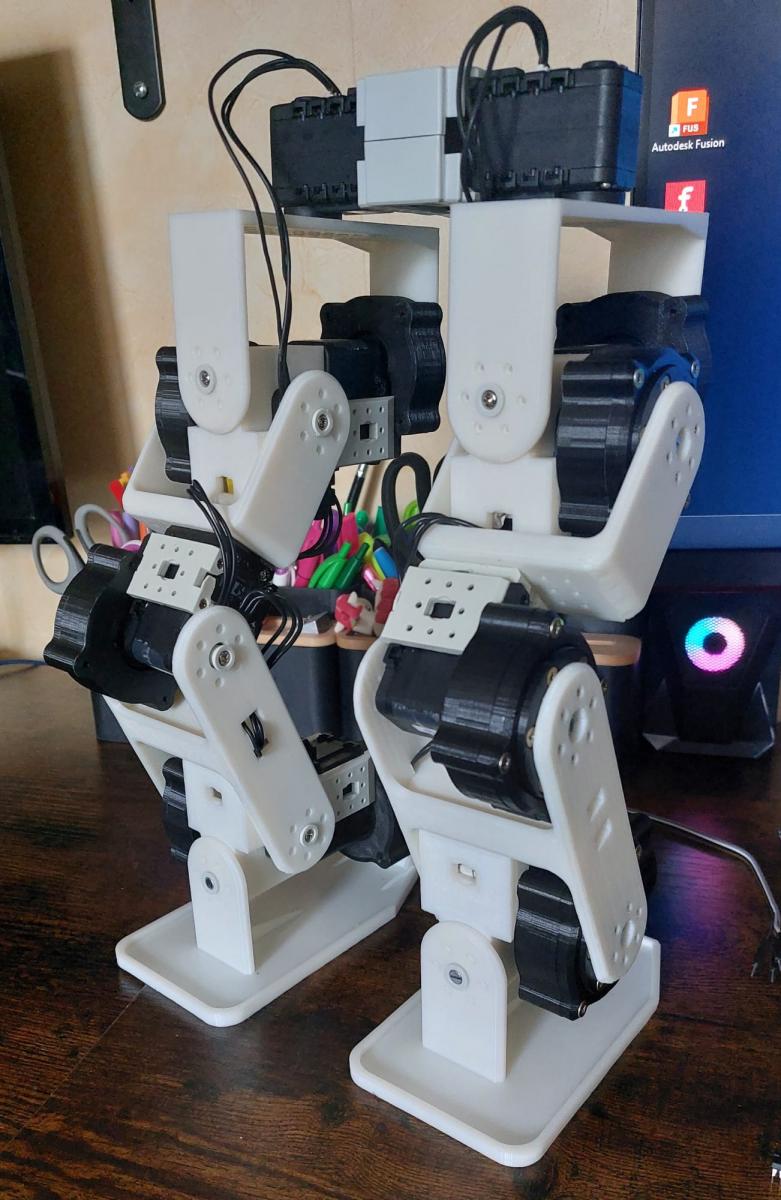
J'ai réussi à ne pas trop prendre de hauteur
Je passe de 14cm à 15cm du sol à l'axe du genoux.
Le poids quand à lui passe de 225g à 390g soit une augmentation de 75%. C'est assez énorme (x1,75) mais avec plus de puissance (x2,75).
Je pense que l'augmentation du poids sur les pieds n'aura pas trop d’impact (en tout cas j'espère) vu que les pieds sont le plus souvent posés au sol.
Par contre il va falloir pouvoir lever le pied ^^ du coup genoux et hanche devront certainement avoir le même réducteur planétaire.
J'ai donc le même système pour les hanche qui vont prendre 165g par coté et les genoux qui devraient prendre 80g par coté également soit une augmentation sur la partie basse sans compté les pieds ((165+80)*2) = 490g et si j'arrive à ne pas monter plus en hauteur, 2 cm de plus.
Normalement la partie haute n'aura pas besoin d'augmentation de couple