Aide au montage du Rocbot.

Ce tutoriel vous aidera à construire votre rocbot en illustrant un exemple de montage pas à pas.
Le montage se fait en 2 étapes :
- Montage des éléments électroniques et mécaniques.
- Programmation du robot.
Pour le montage j'ai utilisé :
- Un fer à souder et de l’étain.
- Une petite pince à bec.
- Une petite pince coupante.
- Un tournevis cruciforme.
Fichier 3D:
 Rocbot_stl_1.00.zip 350,3 Ko
1267 téléchargement(s)
Rocbot_stl_1.00.zip 350,3 Ko
1267 téléchargement(s)
Rocbot_stl_1.01.zip 426,62 Ko
922 téléchargement(s)
Programme:
Rocbot_BT.zip 499 octets
867 téléchargement(s)
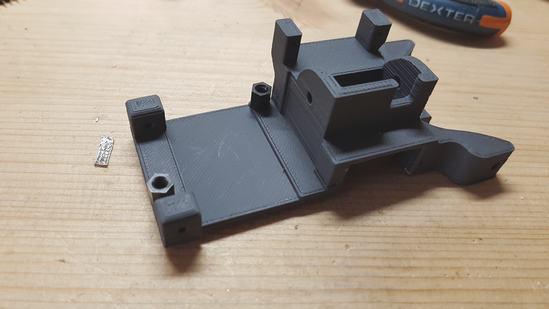
Première étape : Montage des éléments électroniques et mécaniques.
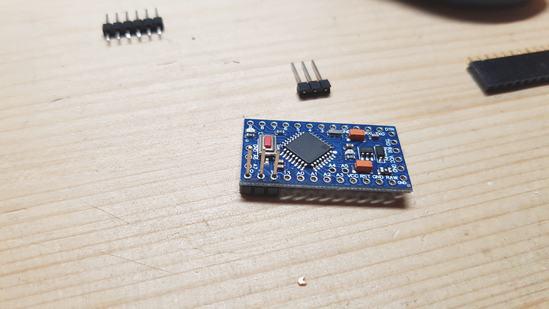
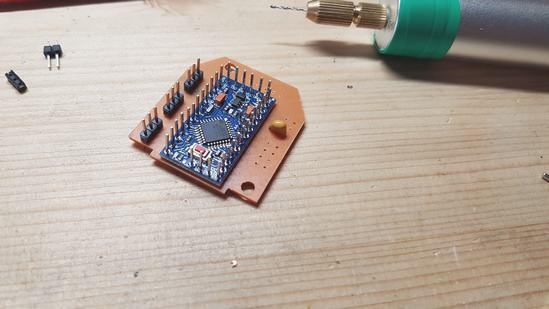
Je commence par souder une arduino pro mini sur le pcb avec des broches. J'utilise la pince à bec pour enfoncer les broches comme sur la photo.
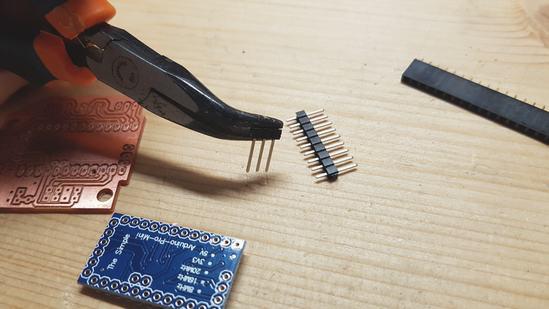
Le but est de souder ces connecteurs sur l'arduino par le dessus et de garder une longueur suffisante pour connecter autre chose directement sur l'arduino.
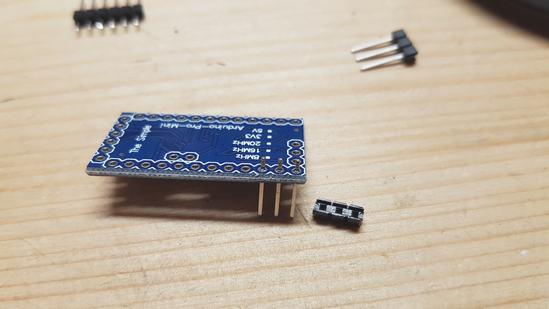
Je soude les connecteurs 3 par 3 pour pouvoir enlever facilement le plastique noir.
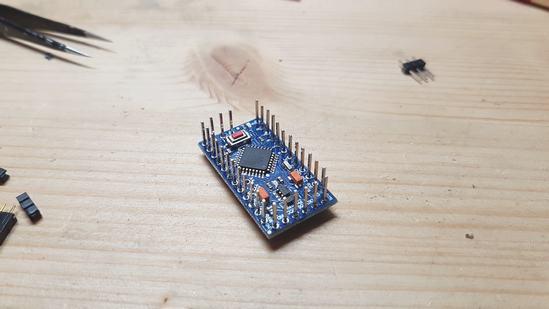
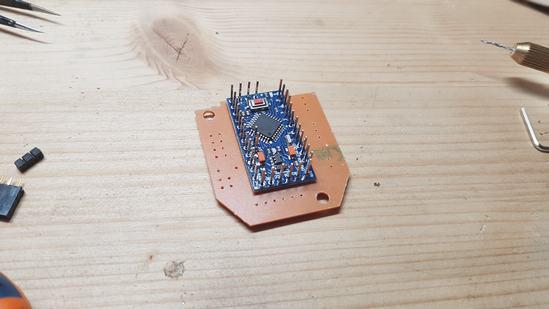
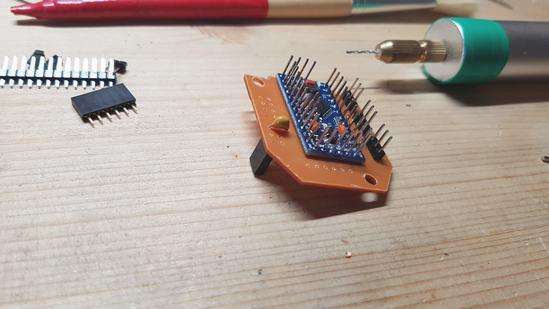
Ensuite je soude l'arduino pro mini sur le pcb.
Soudure des 3 connecteurs qui serviront à brancher les servomoteurs et du petit condensateur (il n'y a pas de polarisation sur ce condensateur).
Soudure des connecteurs femelles.

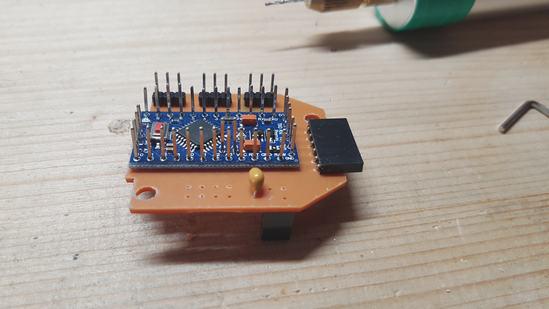
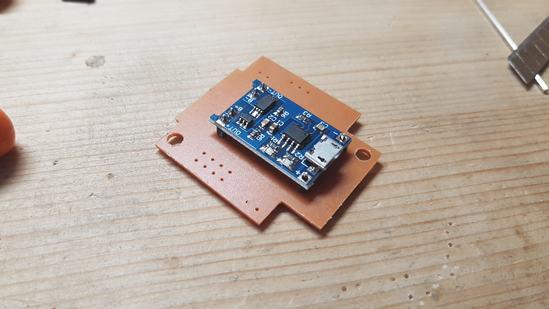
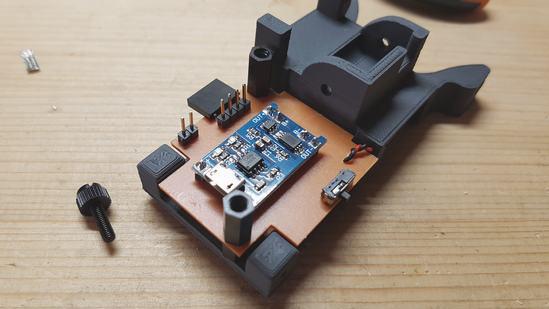
Maintenant je soude l'autre pcb, en commençant par le chargeur de batterie.
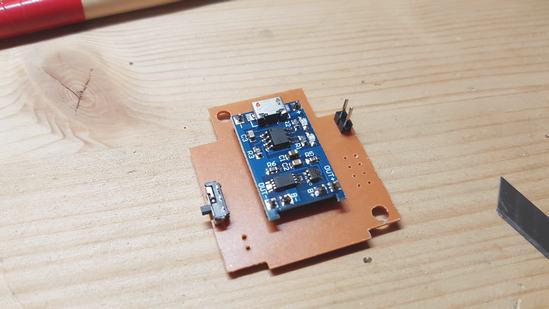
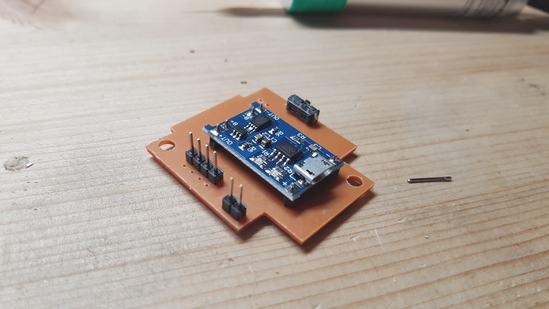
Soudure de l'interrupteur et des connecteurs mâles.

Soudure de la batterie.


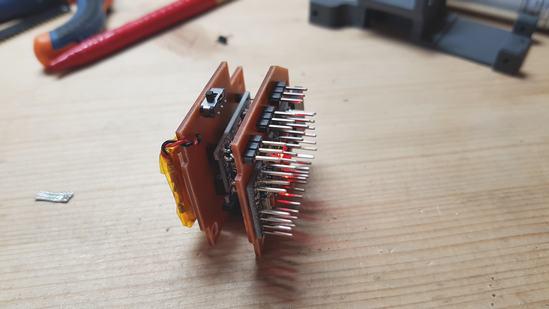
J'ai fixé la batterie avec un morceau de scotch double face, mais ce n'est pas obligatoire. La partie montage électronique est terminée, je vais monter tout ça sur le châssis du robot .
Je commence par visser les 2 supports en nylon.
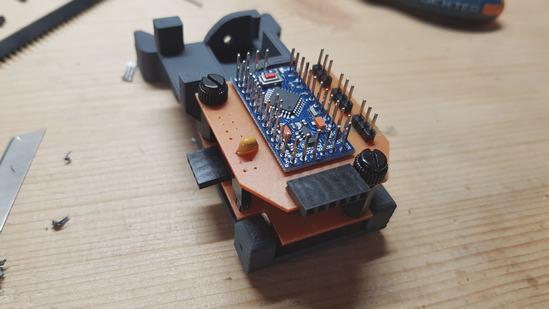
Ensuite je fixe le premier pcb avec 2 autres supports en nylon, plus grands que les premiers.
J'ajoute le 2eme pcb et je le fixe avec 2 visses en nylon. Entre temps on remarque que j'ai ajouté un connecteur femelle sur le premier pcb.
Je monte les roulements avec une vis et une rondelle montées comme sur la photo.
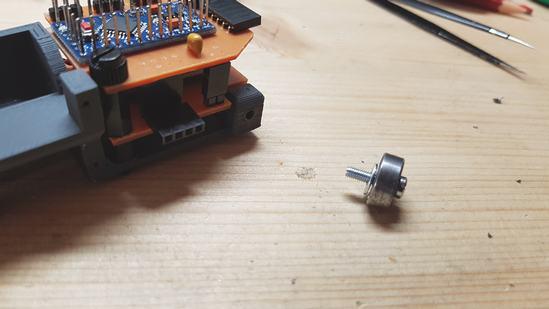
Pour monter les barbotins arrières il suffit d'enfoncer les roulements à l’intérieur.
J’insère 2 servomoteurs en faisant passer les câbles dans les fentes. On peut les laisser montés serrés ou les fixer à la colle ou avec des petites vis.
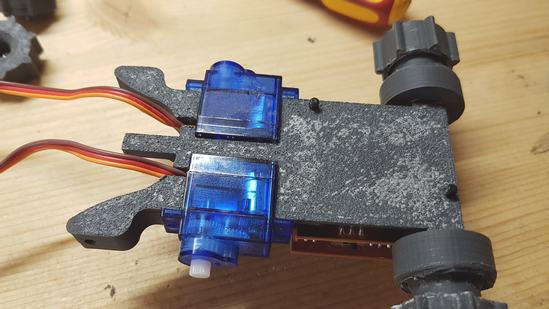
Pour monter les barbotins de devant, j'ai coupé les palonniers des servomoteurs comme sur la photo qui suit.

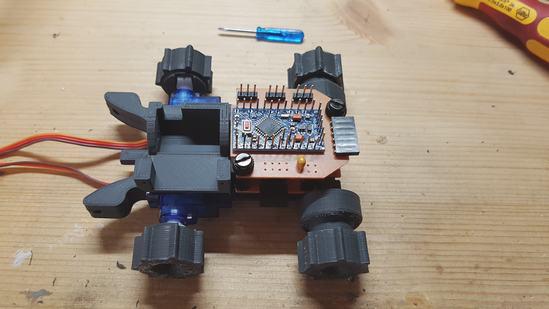
Un aperçu du dessus.
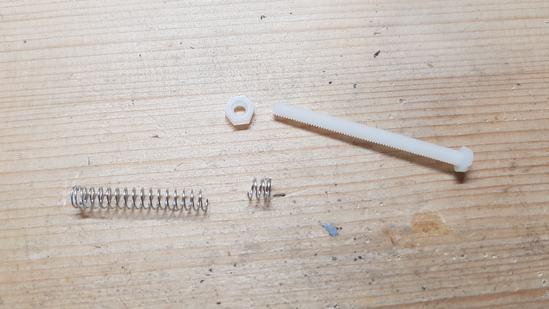
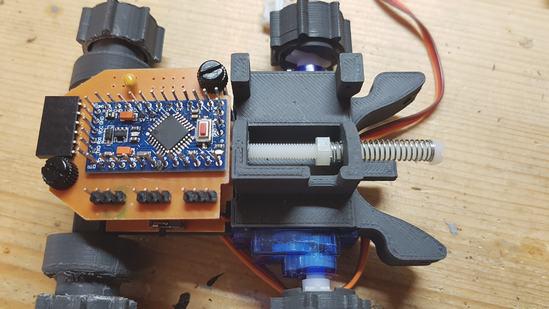
Maintenant je m'occupe du système de tir. J'utilise une vis et un écrou en nylon avec un ressort que je coupe en deux.
Et je monte le tout de cette manière :
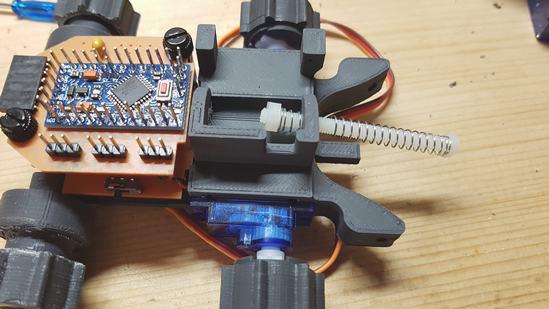
Je m'aide de la pince et du tournevis.
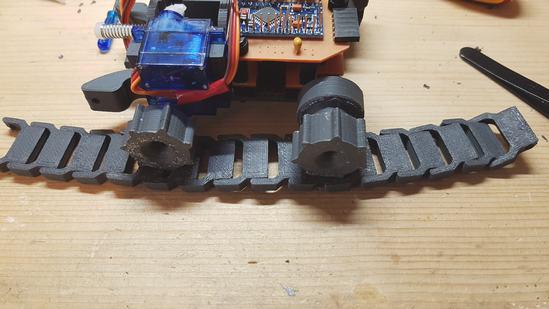
Ensuite je coupe un palonnier en forme d'hélice pour le servomoteur de tir.

Je fixe ce servomoteur avec de la colle ou des vis.Je monte les maillons de chaînes ensembles (16 maillons pour une chaîne) puis je monte les chaînes de chaque côté.

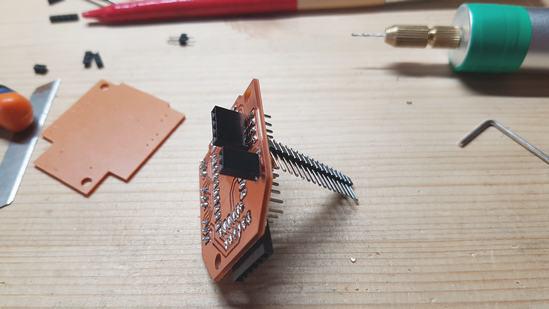
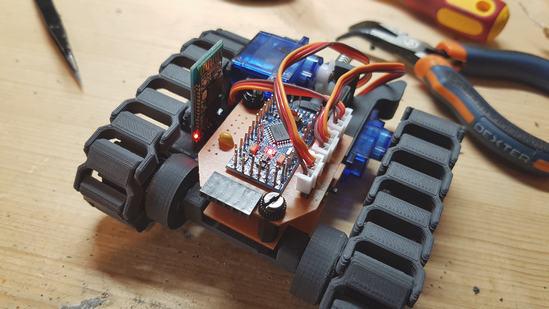
Dans cet exemple, je choisis de contrôler mon rocbot par bluetouth. Je soude le connecteur du module bluetouth de cette manière :

Et je le monte sur le robot :
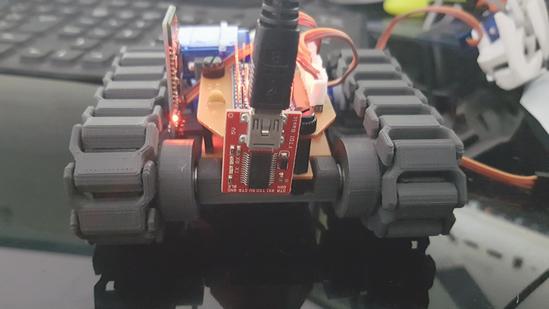
Deuxième étape : programmation du robot.
Pour connecter le robot au PC, j'utilise un convertisseur FTDI. Pour le sens du branchement : « DTR » à droite, « GND » à gauche.
Ensuite ouvrez le programme « Rocbot_BT » et dans « outil » sélectionnez la bonne carte arduino et le port COM correspondant.
Téléverser le programme:
Pour contrôler le robot j'utilise l'application Bluetouth electronics.

Installez l'application et configurez votre télécommande, placez un pad et un bouton poussoir.
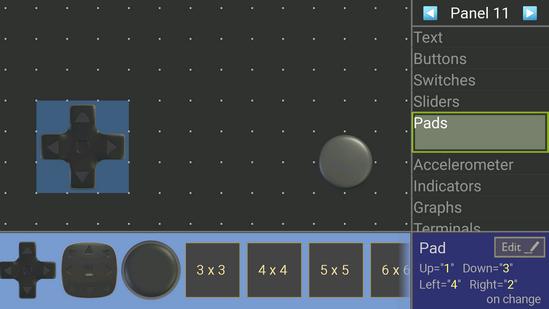
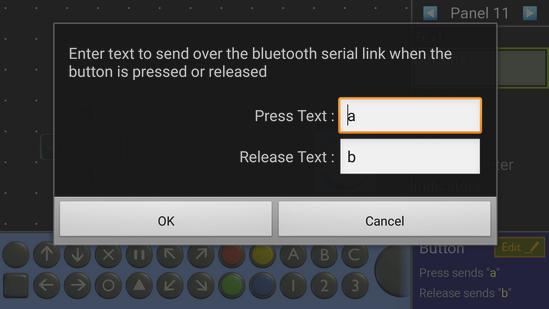
Réglez le bouton poussoir comme si dessous en appuyant sur « Edit » en bas à droite de l'écran.
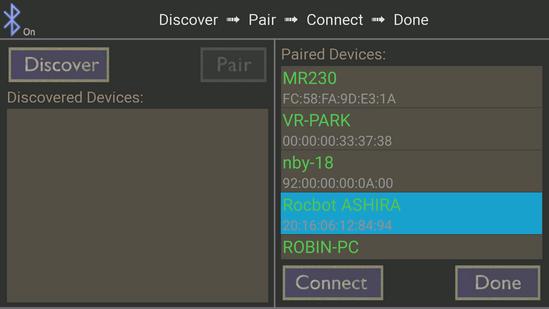
Ensuite après avoir appairé votre smartphone avec le module hc-05, connectez vous au module avec l'application.
Démarrez votre télécommande en appuyant sur « run ».

Vous pouvez maintenant contrôler le robot !