Mon contenu
Mon contenu Non spécifié
Non spécifié





 Posté par
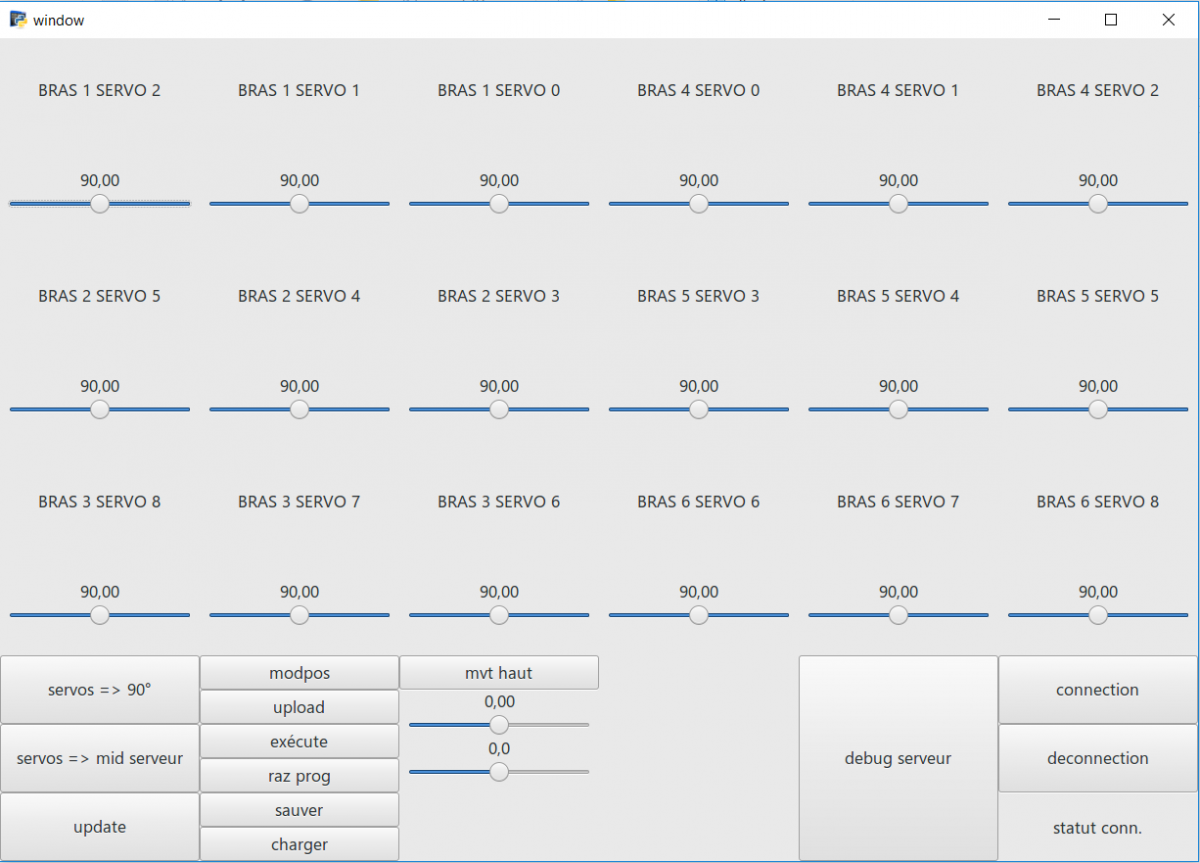
Posté par Ici, je tiens vraiment à une architecture client / serveur. Après je souhaite partir sur la réalisation d’une « manette » à base de Raspberry avec un écran tactile pour l’ihm et les fonctions annexes ( capteur, etc...), et une partie analogique avec des stick pour le déplacement.
- Mike118 aime ceci
 (les accouplements ont lâchés les uns après les autres).
(les accouplements ont lâchés les uns après les autres).
 . Il faut que je dimensionne la batterie et le convertisseur après avoir fait une mesure réelle.
. Il faut que je dimensionne la batterie et le convertisseur après avoir fait une mesure réelle.