Mon contenu
Mon contenu Non spécifié
Non spécifié

 Posté par
Posté par Bonsoir !
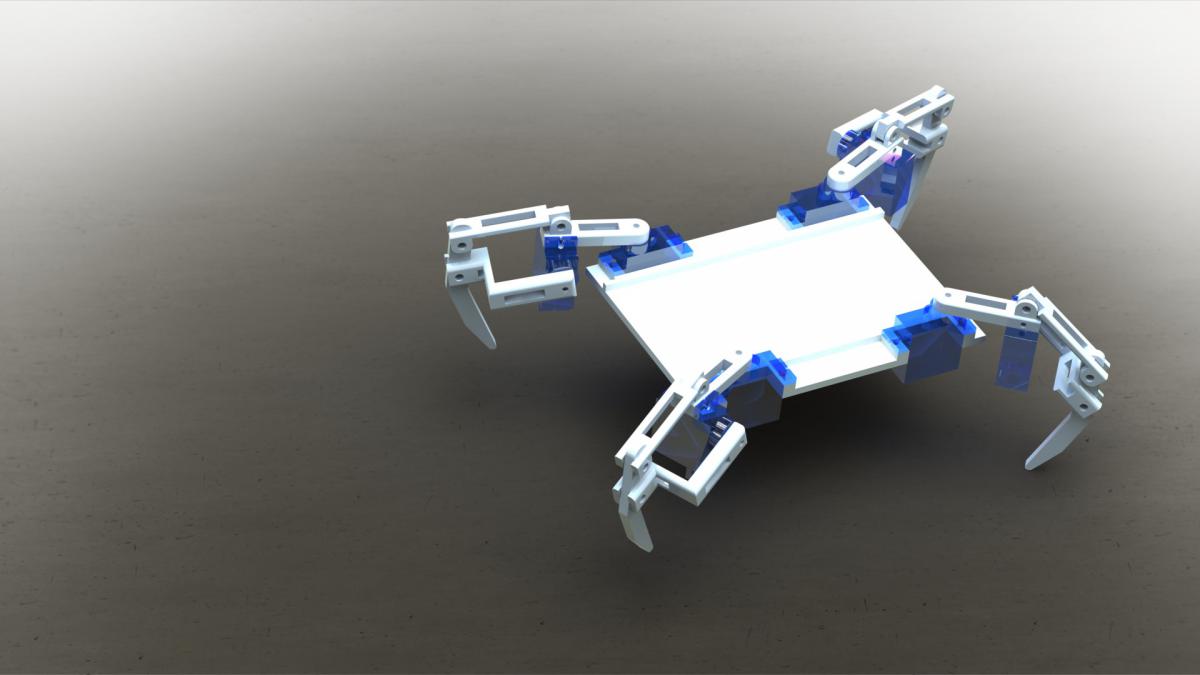
Le projet n'est pas mort  ! Je suis pas mal occupé en ce moment, mais j'ai commencé à recevoir plusieurs composants qui vont me permettre de commencer à bidouiller !
! Je suis pas mal occupé en ce moment, mais j'ai commencé à recevoir plusieurs composants qui vont me permettre de commencer à bidouiller !
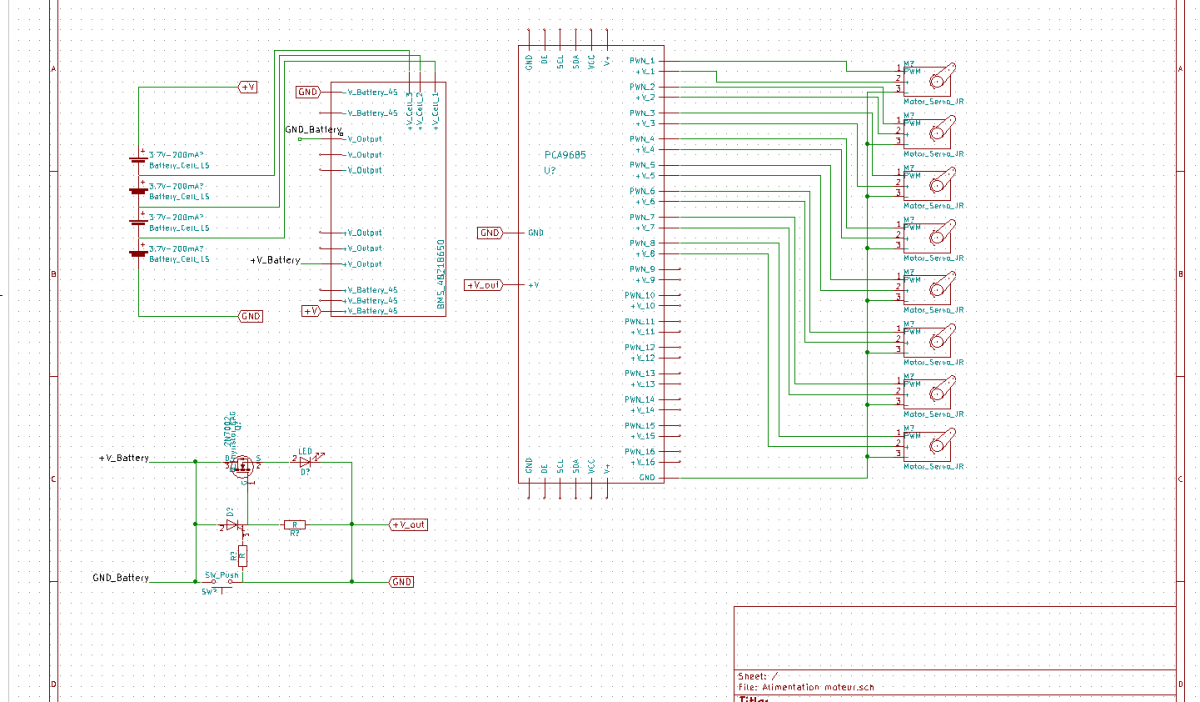
J'ai donc une dizaine de servomoteurs SG90, une carte Driver pour les SG90, 2 Step-Down, des cellules Lipo, un BMS, du câble, des thyristors/transistors/diodes, une alim et des régulateurs :
Voici une petite photo du butin :

J'ai pus trouver le temps d'apprendre à commander un thyristor 
Je vous tiendrai au courant de l'avancement ^^
Bonne soirée.