Mon contenu
Mon contenu Homme
Homme

 Posté par
Posté par Bonsoir, pour pouvoir t'aider il faudrait un bout de code.
Cela peut venir de ton calcul d'angle qui n'est pas assez rapide après je ne connais pas Accelstepper mais peut etre stepper.setAcceleration n'est pas assez élevé.
En tout cas c'est super tu es sur la bonne voie.
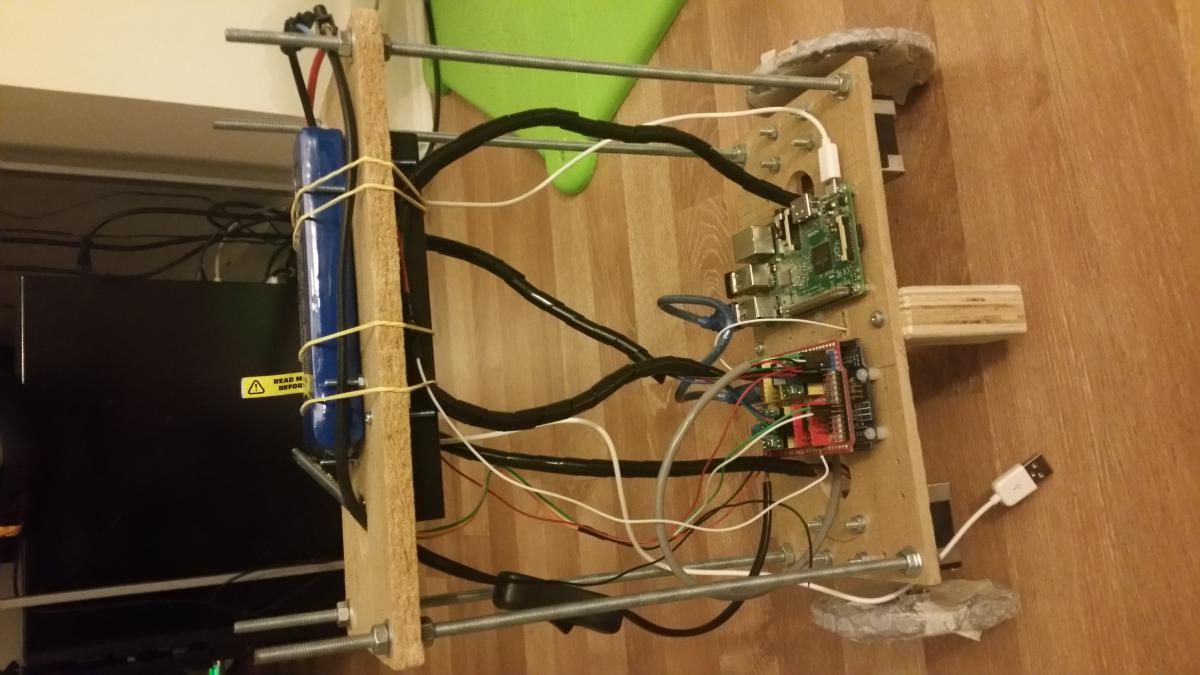
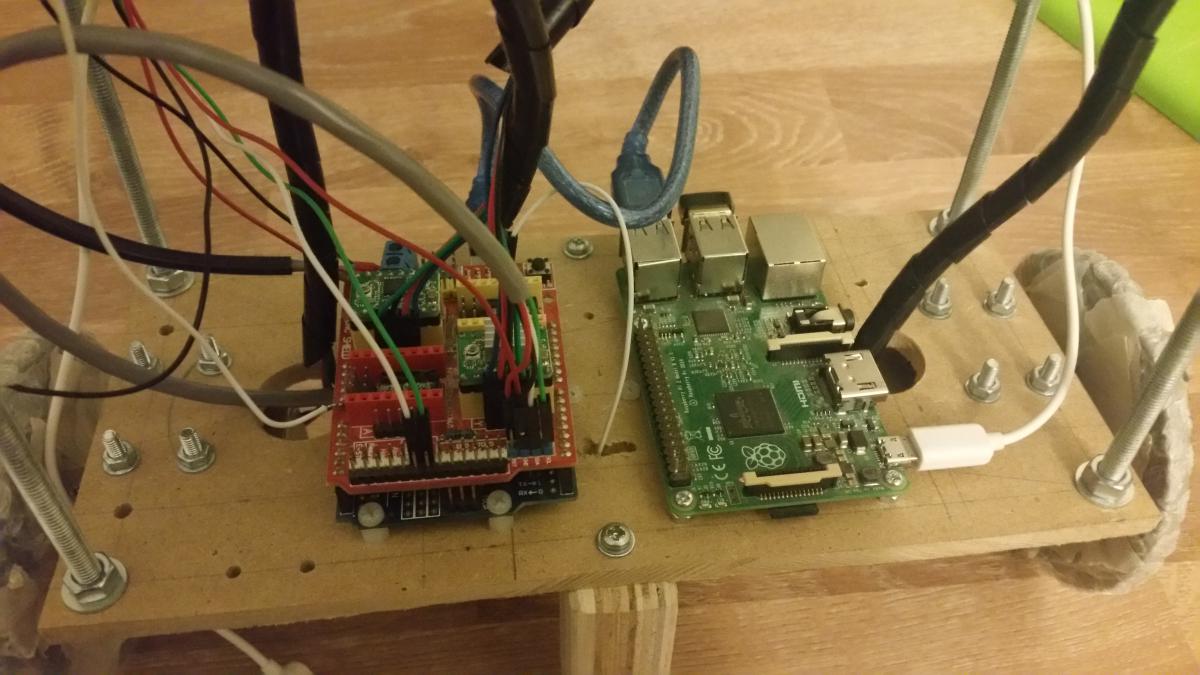
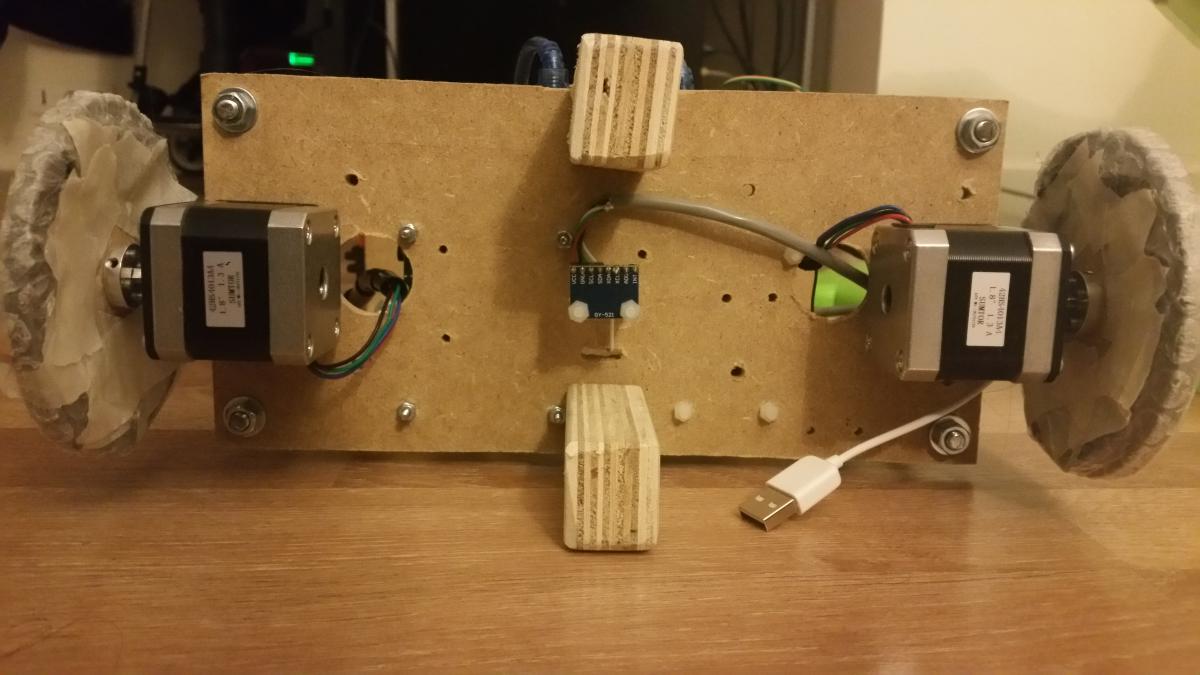
Concernant le MPU j'ai du utiliser un câble blindé car j'avais des interférences provenant de mes moteurs qui faisait planté l'I2C si cela peu t'aider.
Après tu peux vérifier le temps de ton Loop avec un truc comme ça tu devrait normalement avoir quelque chose entre 3 et 20ms ne surtout pas utiliser de delay.
//Calcul temps du LOOP toutes les variable sont de type float
tempoActuel = micros();
tempoPasse = (tempoActuel - tempoAnterieur); //Temps passé depuis la dernière boucle de programme en Microsecondes
tempo = tempoPasse / 1000; //Temps passé depuis la dernière boucle de programme en Millisecondes
Serial.print(" Tempo : ");Serial.println(tempo);
tempoAnterieur = tempoActuel;
- Budet aime ceci