Mon contenu
Mon contenu Non spécifié
Non spécifié





 Posté par
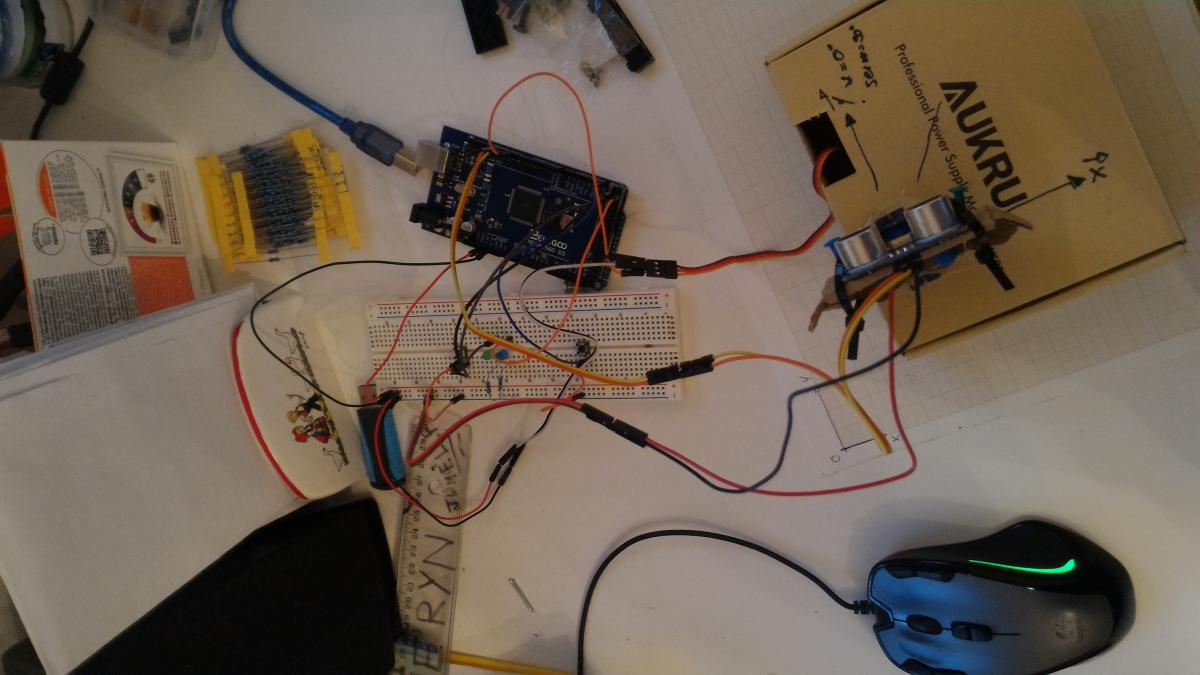
Posté par Voilà pour la photo zoomé.
Le but c'est d'avoir une base pour tester le code maison :
-contrôle commande du moteur
-réglage du PID
-Premiers algo de navigation
-Vérification que tout fonctionne comme prévu
Le tout sans avoir à courir derrière le robot ^^
J'implémente au fur et à mesure afin d'avoir des résultats et de pas être noyé par la complexité.
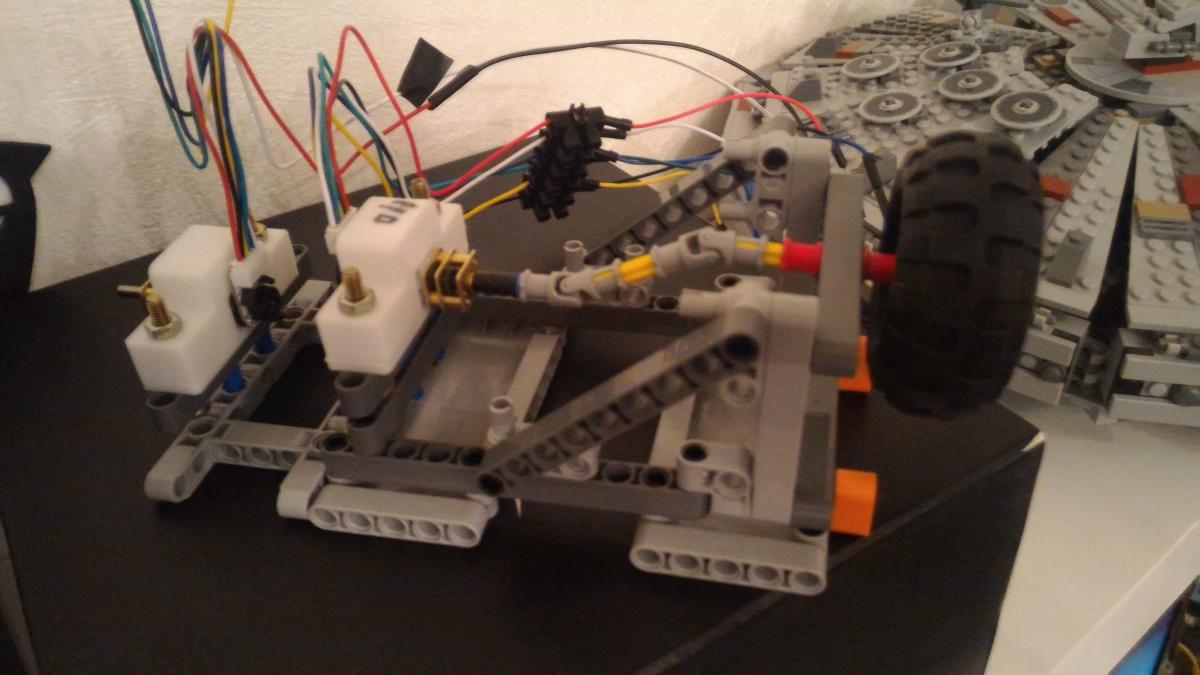
Le montage avec cardan c'est juste pour le fun ^^ (et parce que les accouplements directs c'est pas bon pour les moteurs ^^)
Image(s) jointe(s)
- Amhnemus aime ceci