Mon contenu
Mon contenu Homme
Homme




 Posté par
Posté par Hey !
Désolé pour le retard, entre le déménagement et les projets en entreprises je n'ai pas eu le temps d'actualiser le sujet.
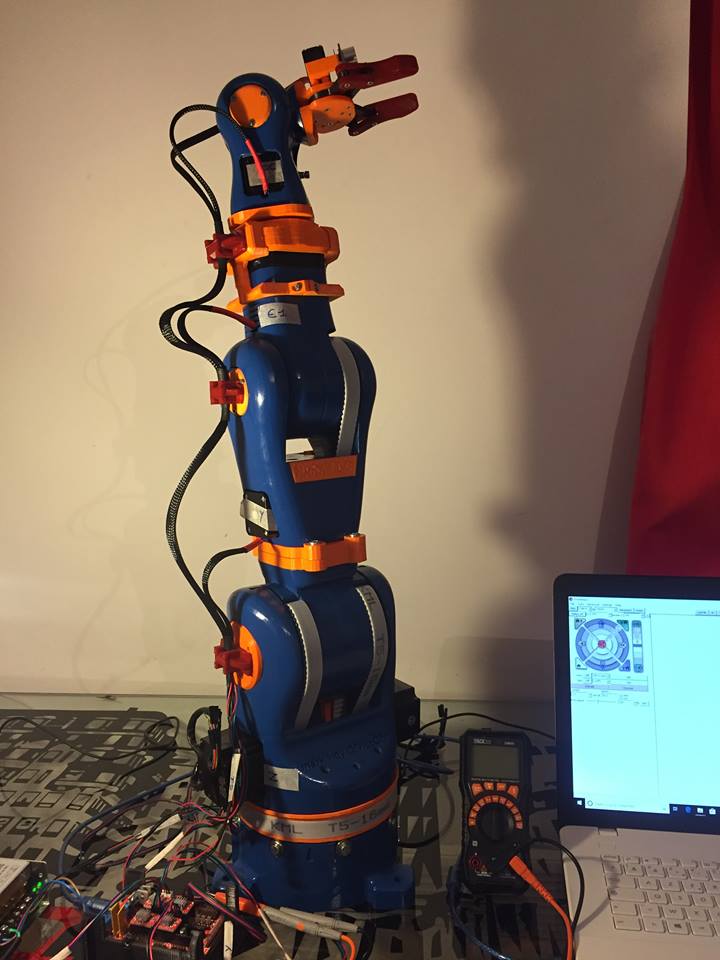
A la fin du troisième mois voici ce que nous avons :
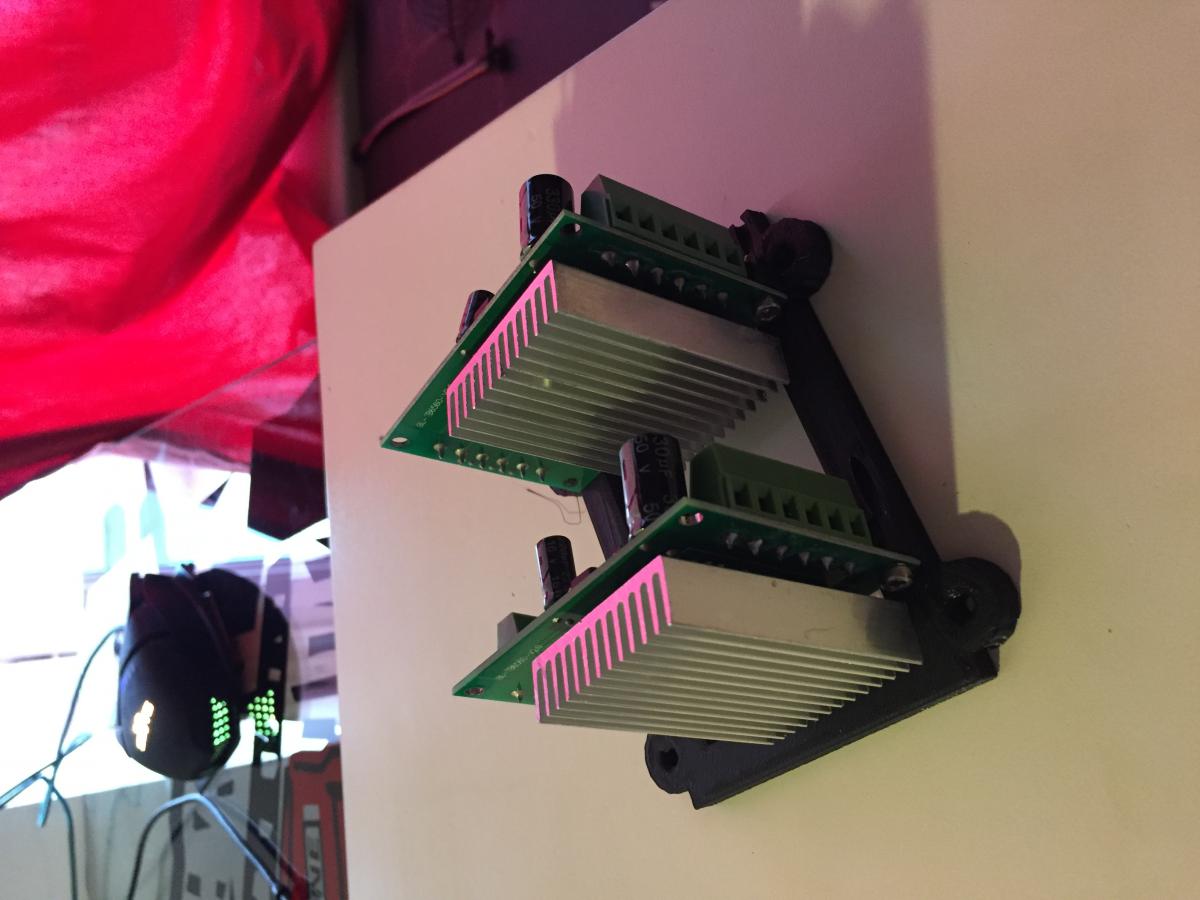
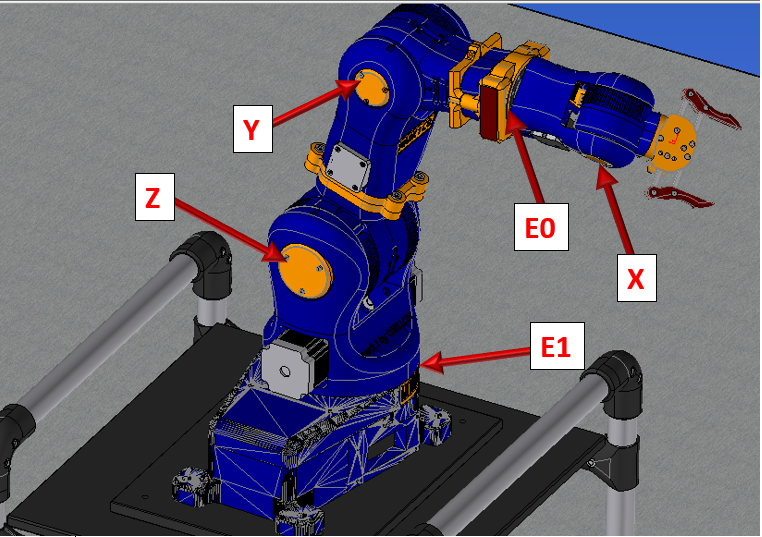
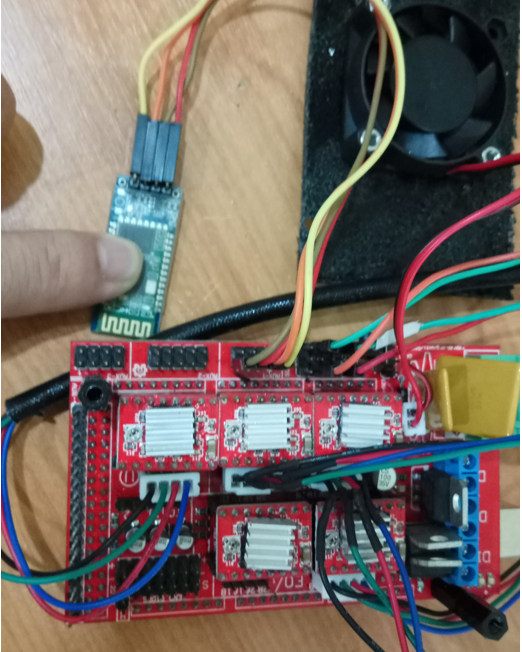
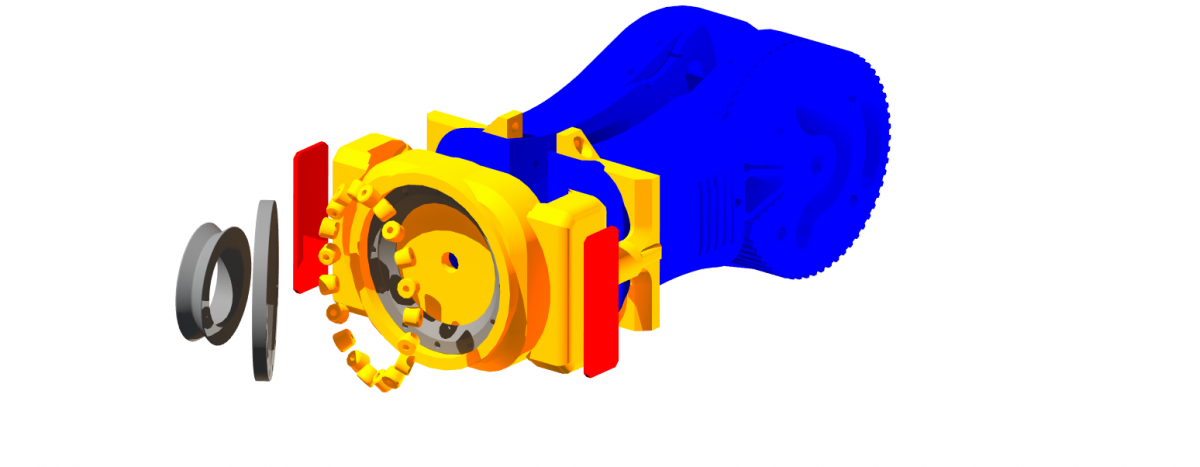
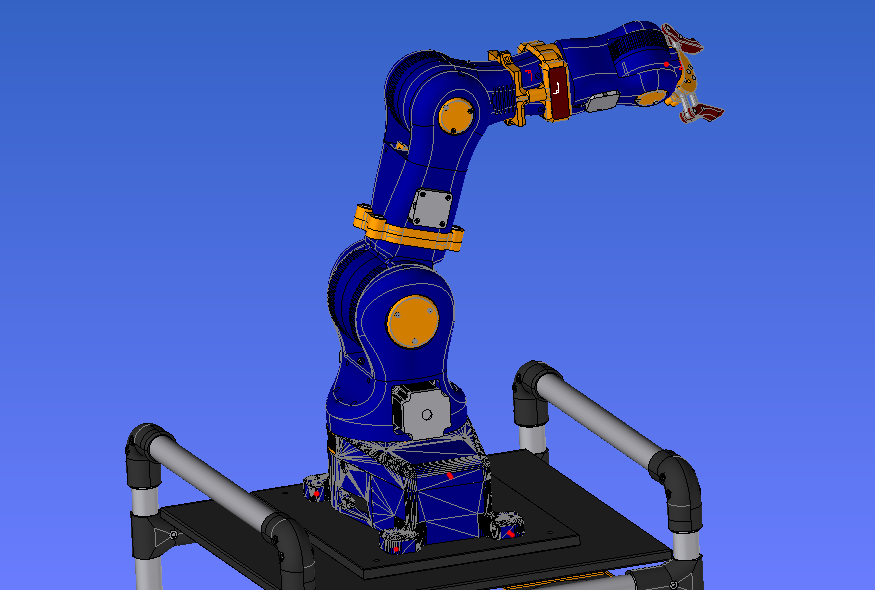
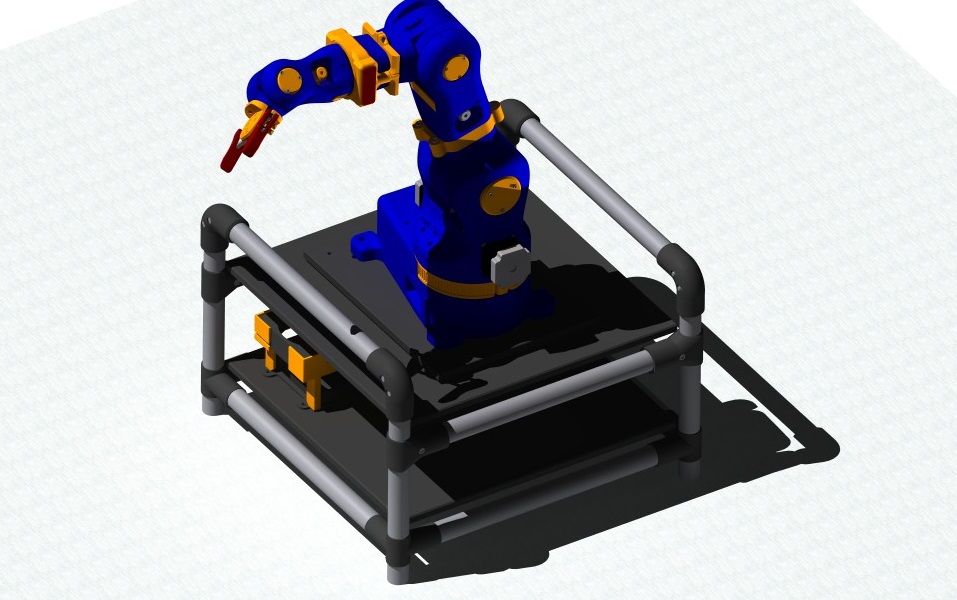
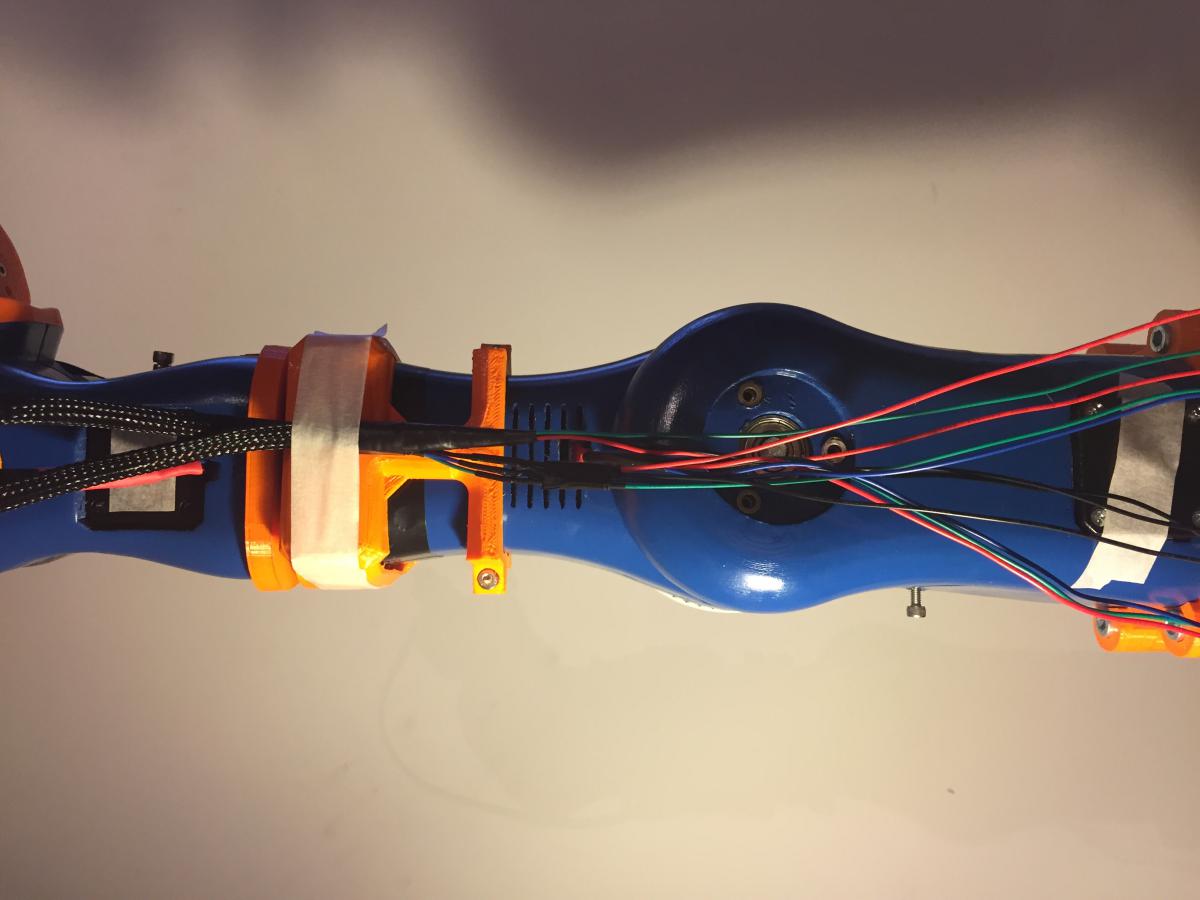
Une structure enfin terminé :
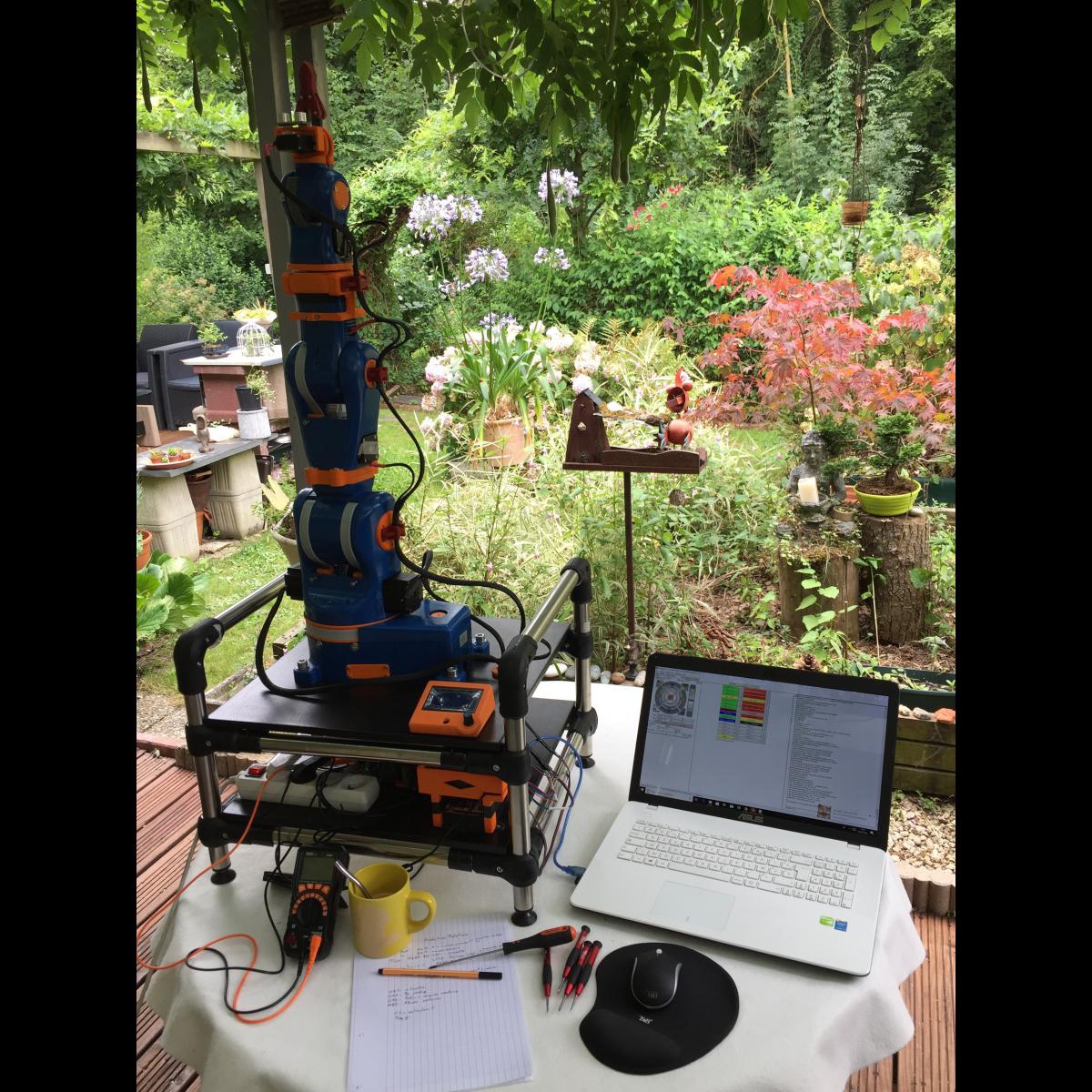


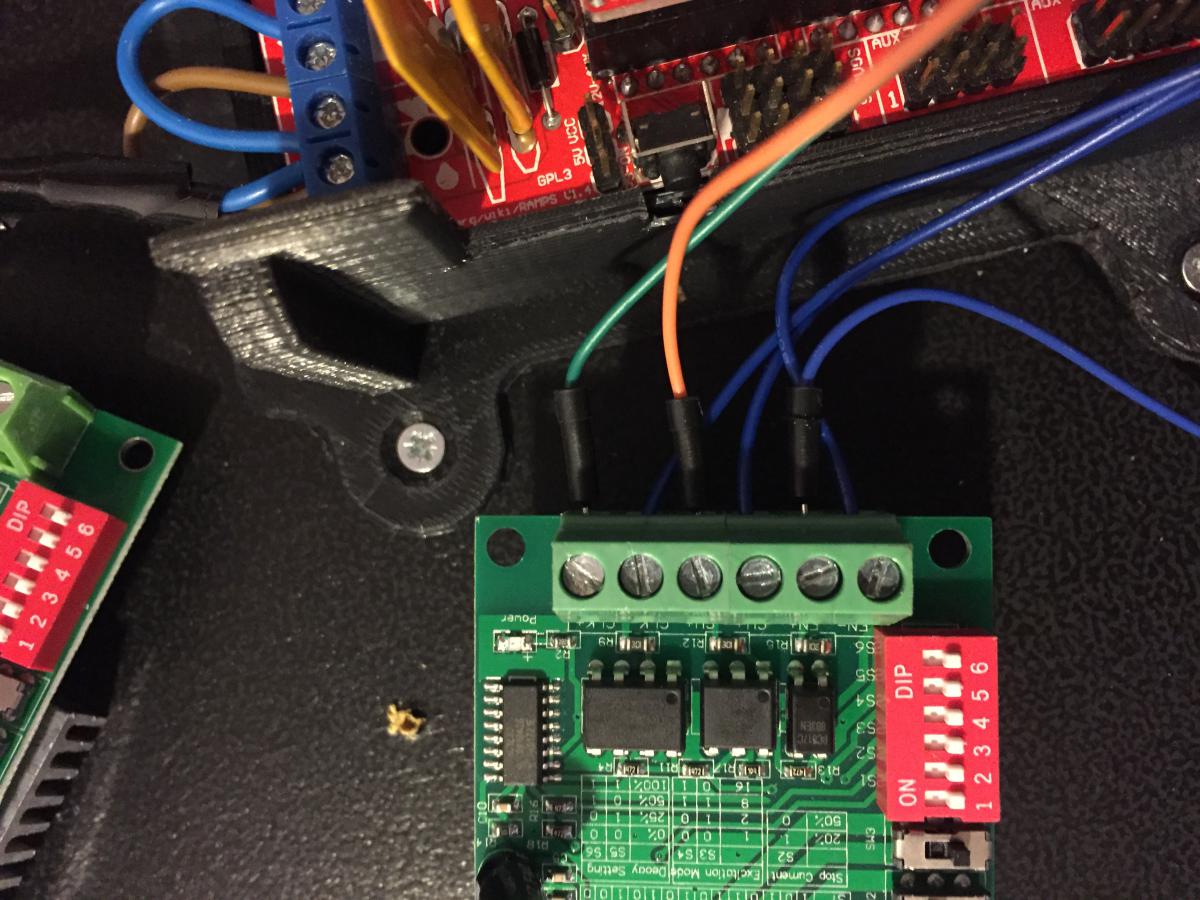
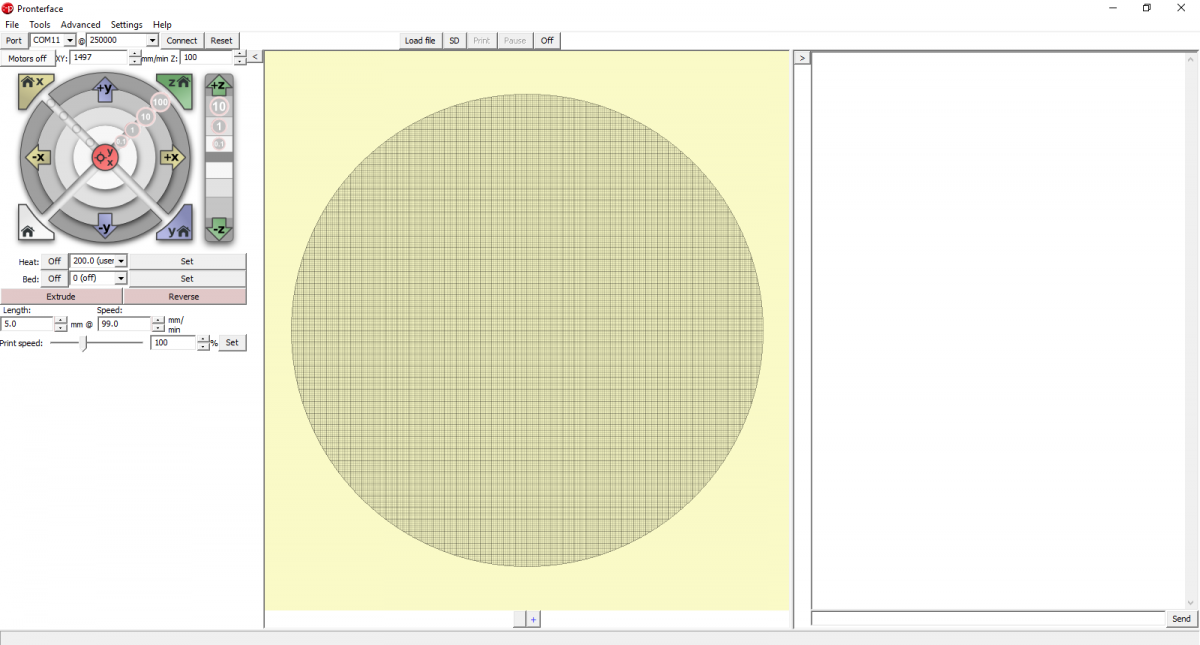
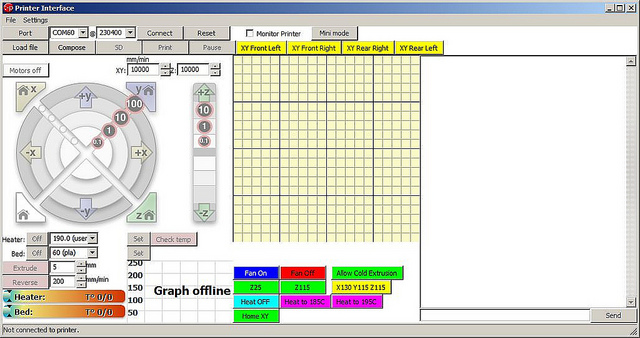
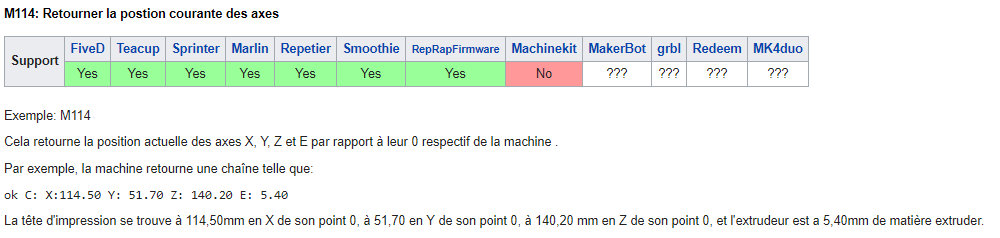
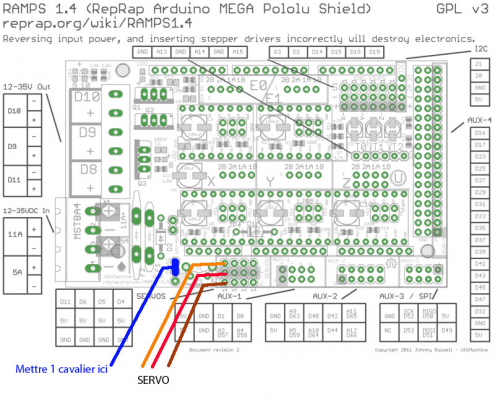
Un logiciel fonctionnel avec une interface graphique. Répondant parfaitement au commande en G.code.
Maintenant il me reste un moi pour transformer des positions relative en G.Code afin de pouvoir créé automatiquement des programmes.